 2015-05-13
2015-05-13 4783
4783Индуктивные датчики служат для преобразования углового или линейного механического перемещения в электрическое напряжение переменного тока [11]. Принцип действия таких датчиков основан на изменении индуктивности катушки с ферромагнитным сердечником (собственно индуктивные датчики) или взаимоиндуктивности системы таких катушек (трансформаторные индуктивные датчики) при изменении величины измеряемого перемещения. Индуктивные датчики относятся к числу параметрических преобразователей сигнала и по принципу действия требуют питания от источника переменного тока.
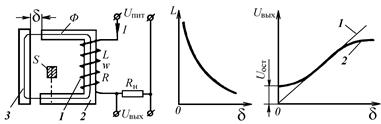
Простейший индуктивный датчик с переменными величинами воздушного зазора (рис. 2.24, а) представляет собой катушку 1, размещенную на сердечнике 2 из ферромагнитного материала и включенную в цепь переменного тока последовательно с сопротивлением нагрузки R н. Якорь датчика 3 связан с источником измеряемого перемещения и может поступательно перемещаться относительно сердечника 2.
а б в
Рис. 2.24. Простейший индуктивный датчик:
а – принципиальная схема; б – зависимость индуктивности
обмотки датчика от величины воздушного зазора;
в – статическая характеристика датчика (1 – идеальная; 2 – реальная)
Индуктивность L катушки 1 с магнитопроводом 2 при наличии воздушного зазора δ равна:
 , (2.29)
, (2.29)
где w – число витков катушки; R м.ст = l м / (μ S м), Rd = 2δ / (μ0 S d) –магнитные сопротивления стального магнитопровода и воздушного зазора, Гн-1; l м – средняя длина стального магнитопровода, м; d – длина воздушного зазора, м; μ, μ0 – магнитные проницаемости стального магнитопровода и воздуха, Гн/м;
S м, S d – площади поперечного сечения стального магнитопровода и воздушного зазора, м2.
Магнитное сопротивление R мцепи определяется сопротивлениями стального магнитопровода (сердечника и якоря) R м.ст и двух воздушных зазоров R d,т. е. R м = R м.ст + R d. Так как
R d >> R м.ст, то индуктивность катушки (рис. 2.24, б)
 .
.
Таким образом, индуктивность катушки обратно пропорциональна величине воздушного зазора. При этом напряжение на выходе датчика
 (2.30)
(2.30)
где R ки ω L – активное и индуктивное сопротивления катушки; R н – активное сопротивления нагрузки.
Обычно w L >> R к. Тогда при условии, что сопротивление нагрузки мало по сравнению с сопротивлением катушки, выражение (2.30) можно представить в виде:
 или U вых = k d,(2.31)
или U вых = k d,(2.31)
где  – коэффициент передачи (чувствительность) индуктивного датчика.
– коэффициент передачи (чувствительность) индуктивного датчика.
Таким образом, при принятых допущениях статическая характеристика U вых = φ(δ) индуктивного датчика будет линейной (прямая 1, рис. 2.24, в).Реальная же характеристика будет иметь нелинейные участки при малых и больших зазорах d (кривая 2,рис. 2.24, в). При малых δ сказывается сопротивление R м.ст,а при больших d возрастают потоки рассеяния, которые не учитываются в выражении (2.31).
Индуктивные датчики с переменной величиной воздушного зазора применяют для измерений перемещений в диапазоне 0,01 ¸ 1 мм. При больших величинах статическая характеристика датчика становится нелинейной.
Так как индуктивный датчик представляет собой амплитудный модулятор, то частота питающего напряжения выбирается, исходя из соотношения  , в котором wmах обозначает максимально возможную частоту изменения измеряемого перемещения. В системах автоматического регулирования максимальная частота изменения входного сигнала
, в котором wmах обозначает максимально возможную частоту изменения измеряемого перемещения. В системах автоматического регулирования максимальная частота изменения входного сигнала
 Гц. (2.32)
Гц. (2.32)
Поэтому для питания индуктивных датчиков обычно используют источники напряжения повышенной частоты (400, 500, 1000 Гц), что позволяет также значительно уменьшить габариты датчиков.
К недостаткам простейших индуктивных датчиков относятся наличие тока холостого хода и, следовательно, напряжения U ост на выходе при d = 0,а также низкая чувствительность при малых перемещениях. Кроме того, эти датчики являются однотактными и поэтому не реагируют на изменение знака входной величины.
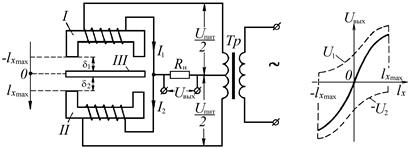
Отмеченные недостатки отсутствуют у двухтактных (реверсивных) индуктивных датчиков, обычно включаемых по дифференциальной или мостовой схемам.
На одну диагональ моста подается питающее напряжение U пит, а в другую диагональ включено сопротивление нагрузки. Параметры схемы выбираются таким образом, что при среднем положении якоря мост сбалансирован и выходное напряжение датчика U вых = 0. Это положение якоря датчика принимается за нуль отсчета величины измеряемого перемещения (рис. 2.25, а). При отклонении якоря от среднего положения равновесие моста нарушается и на сопротивлении нагрузки появляется напряжение, величина которого зависит от величины измеряемого перемещения lх, а фаза изменяется на 180° при изменении знака lх.
Достоинством дифференциальных датчиков является также меньшая (по сравнению с однотактными схемами) чувствительность датчика к колебаниям окружающей температуры вследствие того, что изменение сопротивления обмоток, расположенных в двух соседних плечах моста, не вызывает его разбаланса.
а б
Рис. 2.25. Дифференциальный индуктивный датчик:
а – принципиальная схема; б – статическая характеристика
Отметим, что при lх = 0 выходное напряжение дифференциального датчика равно нулю только в идеальном случае, при наличии полной электрической и магнитной симметрии обоих плеч датчика. Реальные датчики, вследствие неидентичности параметров магнитных сердечников и обмоток, всегда имеют некоторое остаточное напряжение (порядка единиц и десятков милливольт).
Для измерения больших перемещений (единицы и десятки миллиметров) используются дифференциальные индуктивные датчики соленоидного типа (рис. 2.26). Эти датчики состоят из двух катушек 1 и 2, заключенных в общий кожух и включенных в мостовую схему.
Измеряемой величиной является перемещение ферромагнитного сердечника 3, общего для обеих катушек. Принцип действия датчика аналогичен принципу действия датчика, изображенного на рис. 2.25, а, и не требует пояснений.

