 2015-05-13
2015-05-13 4262
4262К РНД относятся регуляторы, потребляющие энергию извне от автономного источника или не имеющие жесткой связи Ч Э и ИО.
Астатический регулятор частоты вращения непрямого действия предназначен для изменения по заданной программе или поддержания постоянной заданной частоты вращения ротора двигателя путём воздействия на подачу топлива. Упрощённая принципиальная схема такого регулятора представлена на рис. 1.10.
При установившейся частоте вращения сила настроечной пружины 2 равна силе центробежных грузиков 3. При этом золотник 5 перекрывает своими поясками или буртиками оба отверстия цилиндра сервопоршня 6. Сервопоршень 6 неподвижен и подача топлива к двигателю постоянна и определяется сечением клапана дозирующей иглы 7.
Основные элементы данного регулятора в соответствии с терминологией, принятой в теории автоматического управления:
ОР – газотурбинный двигатель;
РП – частота вращения ротора двигателя  ;
;
РФ – расход топлива в двигатель  ;
;
ВВ – давление  и температура
и температура  воздуха на входе в двигатель;
воздуха на входе в двигатель;
ИМ – дозирующая игла;
ЧЭ – центробежные грузики.
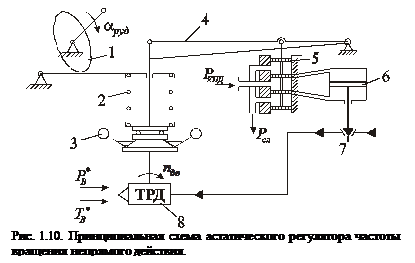
Управляющим воздействием является угол поворота рычага управления программным кулачком  .
.
Регулятор является регулятором непрямого действия, так как привод исполнительного механизма, управляемого золотником, осуществляется от дополнительного источника энергии ( - давление жидкости за клапаном постоянного давления).
- давление жидкости за клапаном постоянного давления).
Предположим, что вследствие каких-либо условий полёта угловая скорость ротора двигателя увеличилась. Центробежная сила грузиков, вращающихся со скоростью, пропорциональной частоте вращения ротора двигателя, также увеличивается. В этом случае шток, связанный с левым концом рычага 4 (см. рис. 1.10), будет передвигаться вверх, преодолевая силу настроечной пружины 2. При этом рычаг 4 будет поворачиваться по часовой стрелке относительно своего шарнирно закреплённого правого конца, вынуждая золотник 5, связанный с рычагом 4 шарниром, передвигаться вверх. При перемещении золотника открываются каналы сервопоршня 6 и топливо под давлением поступает в надпоршневую полость. В это же время подпоршневая полость сервопоршня 6 соединяется с линией слива. Под действием перепада давлений  сервопоршень начинает смещаться вниз, при этом дозирующая игла уменьшает подачу топлива в двигатель. Частота вращения ротора двигателя начинает уменьшаться. Центробежная сила грузиков ослабевает и шток, связанный с левым концом рычага 4 начинает перемещаться вниз, поворачивая рычаг 4
сервопоршень начинает смещаться вниз, при этом дозирующая игла уменьшает подачу топлива в двигатель. Частота вращения ротора двигателя начинает уменьшаться. Центробежная сила грузиков ослабевает и шток, связанный с левым концом рычага 4 начинает перемещаться вниз, поворачивая рычаг 4 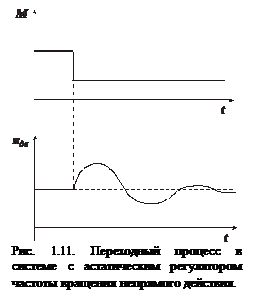 против часовой стрелки. При этом золотник 5 движется вниз и перекрывает своими кромками окна золотника. Сервопоршень 6 при этом остаётся в положении, соответствующем уменьшенному расходу топлива. Уменьшение подачи топлива, таким образом, прекращается лишь в момент достижения заданной по программе частоты вращения ротора двигателя. Вследствие инерционности ротора двигателя изменение частоты вращения отстаёт от изменения подачи топлива и заданное значение частоты вращения достигается при меньшем, чем требуемое, значении расхода топлива, и регулятор начинает действовать «в обратном направлении» (рис. 1.11).
против часовой стрелки. При этом золотник 5 движется вниз и перекрывает своими кромками окна золотника. Сервопоршень 6 при этом остаётся в положении, соответствующем уменьшенному расходу топлива. Уменьшение подачи топлива, таким образом, прекращается лишь в момент достижения заданной по программе частоты вращения ротора двигателя. Вследствие инерционности ротора двигателя изменение частоты вращения отстаёт от изменения подачи топлива и заданное значение частоты вращения достигается при меньшем, чем требуемое, значении расхода топлива, и регулятор начинает действовать «в обратном направлении» (рис. 1.11).
 Таким образом, регулятор обладает плохим качеством переходного процесса (перерегулирование, колебательность). Ч Э регулятора связан с золотником сервомотора. Поршень сервомотора (И О) не связан жестко с Ч Э и может занимать любое положение при данном положении муфты Ч Э. Это означает, что регулятор, выполненный по такой схеме, способен поддержать заданную частоту вращения при различных нагрузках двигателя. У регулятора отсутствует статическая погрешность регулирования.
Таким образом, регулятор обладает плохим качеством переходного процесса (перерегулирование, колебательность). Ч Э регулятора связан с золотником сервомотора. Поршень сервомотора (И О) не связан жестко с Ч Э и может занимать любое положение при данном положении муфты Ч Э. Это означает, что регулятор, выполненный по такой схеме, способен поддержать заданную частоту вращения при различных нагрузках двигателя. У регулятора отсутствует статическая погрешность регулирования.
Для устранения указанного недостатка (длительного переходного процесса с колебаниями частоты вращения) необходимо регулятор выполнить таким, чтобы подача топлива снижалась и прекращалась до того момента, когда, частота вращения ротора ещё не достигла предписанного значения nпр. Это можно осуществить жесткой обратной связью.
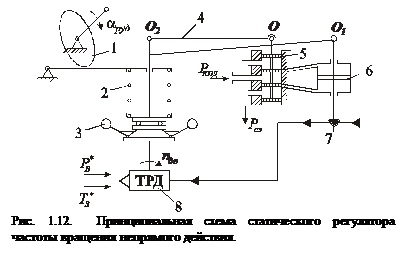
Статический регулятор частоты вращения непрямого действия (регулятор с жесткой обратной связью) (рис. 1.12). Жёсткая связь чувствительного элемента с исполнительным механизмом приводит к тому, что регулятор становится статическим.
Регулятор частоты вращения с жесткой обратной связью работает следующим образом.
В начальный момент времени мгновенным центром вращения является точка О1.
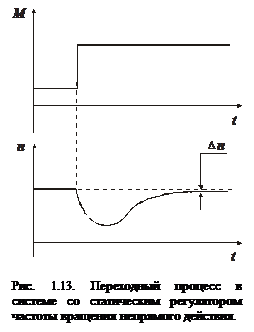 При резком увеличении нагрузки происходит уменьшение частоты вращения ротора двигателя и дифференциальный рычаг перемещается вниз, увлекая за собой и золотник сервомотора. В следующий момент времени мгновенным центром вращения ставится точка О. Под действием давления жидкости, поступающей в нижнюю полость исполнительного механизма, его шток поднимается вверх, дифференциальный рычаг поднимается вверх и возвращает золотник сервомотора в исходное положение. В этом регуляторе ещё до достижения заданной частоты вращения ротора двигателя происходит снижение управляющего сигнала (GT), чем и достигается плавность переходного процесса, а также увеличение быстродействия (рис. 1.13).
При резком увеличении нагрузки происходит уменьшение частоты вращения ротора двигателя и дифференциальный рычаг перемещается вниз, увлекая за собой и золотник сервомотора. В следующий момент времени мгновенным центром вращения ставится точка О. Под действием давления жидкости, поступающей в нижнюю полость исполнительного механизма, его шток поднимается вверх, дифференциальный рычаг поднимается вверх и возвращает золотник сервомотора в исходное положение. В этом регуляторе ещё до достижения заданной частоты вращения ротора двигателя происходит снижение управляющего сигнала (GT), чем и достигается плавность переходного процесса, а также увеличение быстродействия (рис. 1.13).
 Так как на любом установившемся режиме точка О должна находиться в одном и том же положении, то для режима с большим GT точка О1 находится выше, а точка О2 – ниже исходного положения. Это соответствует меньшему значению усилия от действия пружины, т.е. меньшему значению Fцб и, следовательно, несколько меньшей частоте вращения ротора двигателя – на величину статической ошибки.
Так как на любом установившемся режиме точка О должна находиться в одном и том же положении, то для режима с большим GT точка О1 находится выше, а точка О2 – ниже исходного положения. Это соответствует меньшему значению усилия от действия пружины, т.е. меньшему значению Fцб и, следовательно, несколько меньшей частоте вращения ротора двигателя – на величину статической ошибки.
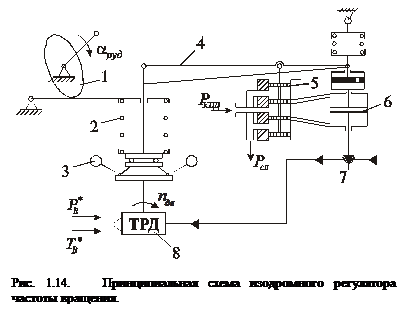
 Для устранения статической ошибки при сохранении хорошего переходного процесса применяют регуляторы с так называемой гибкой обратной связью (изодромные регуляторы) – рис. 1.14.
Для устранения статической ошибки при сохранении хорошего переходного процесса применяют регуляторы с так называемой гибкой обратной связью (изодромные регуляторы) – рис. 1.14.
В изодромном регуляторе совмещены положительные качества статического и астатического регуляторов.
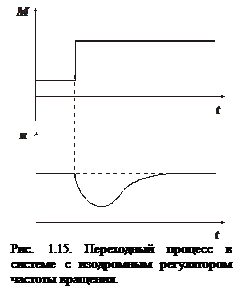
В первоначальный момент времени переходного процесса регулятор работает как статический регулятор (в силу инерции поршня, помещенного в вязкую жидкость), т. е. сигнал об изменении положения И О передаётся на ЧЭ, отсюда – хорошее динамическое качество. При этом движении в полостях катаракта возникает перепад давления и с течением времени поршень вернётся в первоначальное нейтральное положение (под действием пружины изодрома), сняв при этом возникшую в первоначальный момент времени статическую ошибку и разорвав связь между ЧЭ и И О (рис. 1.15).

