| | характеризує відношення відстаней від центра проекції до точки об'єкта і до точки на знімку.
Викладені задачі стосовно до аерофотознiмка ілюструються на рис.1: OГXГYГZГ - геодезична просторова система координат точок місцевості; S - центр проекції; УГS,ХГS,ZГS - лінійні елементи зовнішнього орієнтування знімка; S0 – головний проектуючий промінь; оху - система координат на площині знімка; SXIYIZI - просторова система координат точок знімка (її осі паралельні однойменним осям системи ОГХГУГZГ); Sxyz - допоміжна система координат точок знімка з осями Sx і Sy, паралельними осям ох і оу. У системі SXIYIZI орієнтуються проектуючі промені, (знімок) кутами α, ω і k. Hа рис. 1: А і а - точка місцевості і її зображення на знімку; ΧГΥΓΖΓ- координати точки Α; ΧI,ΥI,ΖI - просторові координати точки а знімка; точки S0, Α0, - проекції точок S і А на координатну площину OГXГYГ; а0- проекція точки знімка а на координатну площину SXIYI.
 Рис. 1
Викладені вище положення, зображені на рис.1, мають математичний опис у виді наступних формул:
Рис. 1
Викладені вище положення, зображені на рис.1, мають математичний опис у виді наступних формул:
 (1)
Ці формули зв'язують дві системи просторових прямокутних координат що мають різні початки, (точки Ог і S) і паралельні однойменні осі. Координати точок місцевості АГ, УГ, ZГ виміряються в метрах, а координати Х', У' Z' зображення точки на знімки виміряються в міліметрах. Щоб погодити розмірність цих координат використовується масштабний коефіцієнт N з розмірністю м/мм. Цей масштабний коефіцієнт і характеризує відношення відстаней SA і Sa: (1)
Ці формули зв'язують дві системи просторових прямокутних координат що мають різні початки, (точки Ог і S) і паралельні однойменні осі. Координати точок місцевості АГ, УГ, ZГ виміряються в метрах, а координати Х', У' Z' зображення точки на знімки виміряються в міліметрах. Щоб погодити розмірність цих координат використовується масштабний коефіцієнт N з розмірністю м/мм. Цей масштабний коефіцієнт і характеризує відношення відстаней SA і Sa:
 (2) (2)
| | | |
|
|
|
|
|
| |
|
| 14,17
| 3,47
| 68,61
| -4,88
| |
| 59,90
| -5,22
| 71,28
| -5,01
| |
| 10,33
| 60,21
| 70,07
| -5,75
| |
| 78,51
| 54,15
| 69,70
| -5,50
| |
| 10,12
| -68,79
| 70,60
| -6,31
| |
| 73,41
| -64,23
| 72,61
| -6,21
|
|
|
| 14,15
| 3,49
| 68,58
| -4,96
| |
| 59,91
| -5,24
| 71,28
| -5,05
| |
| 10,32
| 60,24
| 70,02
| -5,76
| |
| 78,52
| 54,13
| 69,80
| -5,57
| |
| 10,11
| -68,79
| 70,55
| -6,36
| |
| 73,41
| -64,29
| 72,60
| -6,20
|
|
|
| 14,17
| 3,47
| 68,61
| -4,88
| |
| 59,90
| -5,22
| 71,28
| -5,01
| |
| 10,33
| 60,21
| 70,07
| -5,75
| |
| 78,48
| 54,12
| 69,70
| -5,50
| |
| 10,12
| -68,79
| 70,60
| -6,31
| |
| 73,39
| -64,24
| 72,61
| -6,21
|
|
|
| 14,15
| 3,49
| 68,58
| -4,96
| |
| 59,91
| -5,24
| 71,28
| -5,05
| |
| 10,32
| 60,24
| 70,02
| -5,76
| |
| 78,47
| 54,13
| 69,80
| -5,57
| |
| 10,11
| -68,79
| 70,55
| -6,36
| |
| 73,41
| -64,29
| 72,60
| -6,20
|
|
|
| 14,17
| 3,47
| 68,61
| -4,88
| |
| 59,90
| -5,22
| 71,28
| -5,01
| |
| 10,33
| 60,21
| 70,07
| -5,75
| |
| 78,49
| 54,10
| 69,70
| -5,50
| |
| 10,12
| -68,79
| 70,60
| -6,31
| |
| 73,39
| -64,35
| 72,61
| -6,21
|
|
|
| 14,15
| 3,49
| 68,58
| -4,96
| |
| 59,91
| -5,24
| 71,28
| -5,05
| |
| 10,32
| 60,24
| 70,02
| -5,76
| |
| 78,44
| 54,14
| 69,80
| -5,57
| |
| 10,11
| -68,79
| 70,55
| -6,36
| |
| 73,32
| -64,38
| 72,60
| -6,20
|
| |
 (3)
де х, у, z - координати точки знімка в системі Sxyz (рис.1); А - матриця ортогонального перетворення системи координат Sxyz у систему SХIУIZI. Вона має вид квадратної матриці:
(3)
де х, у, z - координати точки знімка в системі Sxyz (рис.1); А - матриця ортогонального перетворення системи координат Sxyz у систему SХIУIZI. Вона має вид квадратної матриці:
 (4)
де елементи а,b,c є функціями кутових елементів орієнтування знімка k, ω, α:
(4)
де елементи а,b,c є функціями кутових елементів орієнтування знімка k, ω, α:
 (5)
Матриці
(5)
Матриці  - матриці послідовного обертання системи Sxyz на кути k, ω, α.
У приведених вище формулах немає елементів внутрішнього орієнтування х0 й у0 - координат головної точки О (рис.1). Вони прирівняні до нуля, вважаючи, що система плоских координат знімка в якості початку має головну точку О.
Визначення координат точок місцевості або інших об'єктів виконуються з використанням одиночного знімка чи стереоскопічних пар (стереопар). Стереоскопічна пара - два знімки з зображенням того самого об'єкта, отримана з двох різних точок простору. На таких знімках точка об'єкта зображується на двох знімках стереопари. Ці точки називаються відповідними, а їхні проектуючі промені - відповідними променями.
Зміст фотограмметричних задач істотно залежить від того, використовуються одиночні знімки чи стереопари.
При використанні одиночного знімка масштабний коефіцієнт N визначається з третьої формули (1):
- матриці послідовного обертання системи Sxyz на кути k, ω, α.
У приведених вище формулах немає елементів внутрішнього орієнтування х0 й у0 - координат головної точки О (рис.1). Вони прирівняні до нуля, вважаючи, що система плоских координат знімка в якості початку має головну точку О.
Визначення координат точок місцевості або інших об'єктів виконуються з використанням одиночного знімка чи стереоскопічних пар (стереопар). Стереоскопічна пара - два знімки з зображенням того самого об'єкта, отримана з двох різних точок простору. На таких знімках точка об'єкта зображується на двох знімках стереопари. Ці точки називаються відповідними, а їхні проектуючі промені - відповідними променями.
Зміст фотограмметричних задач істотно залежить від того, використовуються одиночні знімки чи стереопари.
При використанні одиночного знімка масштабний коефіцієнт N визначається з третьої формули (1):
 (6)
і, отже, визначенню підлягають дві координати XГ YГ
(6)
і, отже, визначенню підлягають дві координати XГ YГ
 (7)
При використанні стереопар масштабний коефіцієнт N визначається виходячи з умови, що точка об'єкта одночасно належить парі відповідних променів, тобто відповідні промені перетинаються. Ця умова виражається рівностями, що випливають також з формул (1):
(7)
При використанні стереопар масштабний коефіцієнт N визначається виходячи з умови, що точка об'єкта одночасно належить парі відповідних променів, тобто відповідні промені перетинаються. Ця умова виражається рівностями, що випливають також з формул (1):
 (8)
де підрядкові індекси 1 і 2 позначають приналежність величини до першого чи другого знімка стереопари.
З цих рівностей можна визначити масштабні коефіцієнти N1 i N2:
(8)
де підрядкові індекси 1 і 2 позначають приналежність величини до першого чи другого знімка стереопари.
З цих рівностей можна визначити масштабні коефіцієнти N1 i N2:
 (9)
де
(9)
де
 . (10)
На практиці звичайно використовується масштабний коефіцієнт N1. Тоді формули (1) приймають вид:
. (10)
На практиці звичайно використовується масштабний коефіцієнт N1. Тоді формули (1) приймають вид:
 (11)
(11)
 (12)
Необхідні елементи зовнішнього орієнтування знімків визначаються з використанням координат опорних точок.
У фотограмметрії опорними точками називаються опорні точки, що роз
(12)
Необхідні елементи зовнішнього орієнтування знімків визначаються з використанням координат опорних точок.
У фотограмметрії опорними точками називаються опорні точки, що роз (13)
Тоді, відповідно до формули Тейлора маємо:
(13)
Тоді, відповідно до формули Тейлора маємо:
 (14)
де
(14)
де  і ін. - частинні похідні функцій (13) по кожній шуканій величині;
і ін. - частинні похідні функцій (13) по кожній шуканій величині;
 - виправлення до приблизних значень
- виправлення до приблизних значень шуканих величин;
(FX) і (FY) - приблизні значення функцій (13).
Приблизні значення функцій (13) і частинні похідні обчислюються з відомими величинами ХГ, YГ, ZГ, x, y, f i з приблизними значеннями шуканих елементів орієнтування знімків.
Приблизні значення лінійних елементів орієнтування знімків можна обчислити за формулами:
шуканих величин;
(FX) і (FY) - приблизні значення функцій (13).
Приблизні значення функцій (13) і частинні похідні обчислюються з відомими величинами ХГ, YГ, ZГ, x, y, f i з приблизними значеннями шуканих елементів орієнтування знімків.
Приблизні значення лінійних елементів орієнтування знімків можна обчислити за формулами:
 (15)
де ХГ, УГ, ZГ - координати чотирьох опорних точок; m - знаменник масштабу знімків. Приблизні значення кутів α, ω, k дорівняються до нуля: (α) = (ω) = (k) = 0
Таким чином, у результаті вирішення рівнянь (14) визначаються виправлення до приблизних значень елементів орієнтування знімка.
Друга особливість вирішення цієї задачі полягає в тім, що мається надлишкова кількість вимірів. Тому, як і при вирішенні геодезичних задач, фотограмметричні визначення виконуються відповідно до теорії способу найменших квадратів. Положення цієї теорії відомі з курсу «Теорія математичної обробки геодезичних вимірів», і тому не має потреби в додаткових поясненнях.
Елементи зовнішнього орієнтування знімків стереопари також обчислюються з використанням координат опорних точок. Строге традиційне вирішення цієї задачі докладно розглядається в лекційному курсі. Тут же - викладається один з можливих варіантів, що у приблизному вирішенні передбачається використовувати при виконанні лабораторної роботи.
Скористаємося рівностями (8). В другу рівність підставимо вираз (9) масштабних коефіцієнтів N1 і N2. У результаті одержимо рівняння:
(15)
де ХГ, УГ, ZГ - координати чотирьох опорних точок; m - знаменник масштабу знімків. Приблизні значення кутів α, ω, k дорівняються до нуля: (α) = (ω) = (k) = 0
Таким чином, у результаті вирішення рівнянь (14) визначаються виправлення до приблизних значень елементів орієнтування знімка.
Друга особливість вирішення цієї задачі полягає в тім, що мається надлишкова кількість вимірів. Тому, як і при вирішенні геодезичних задач, фотограмметричні визначення виконуються відповідно до теорії способу найменших квадратів. Положення цієї теорії відомі з курсу «Теорія математичної обробки геодезичних вимірів», і тому не має потреби в додаткових поясненнях.
Елементи зовнішнього орієнтування знімків стереопари також обчислюються з використанням координат опорних точок. Строге традиційне вирішення цієї задачі докладно розглядається в лекційному курсі. Тут же - викладається один з можливих варіантів, що у приблизному вирішенні передбачається використовувати при виконанні лабораторної роботи.
Скористаємося рівностями (8). В другу рівність підставимо вираз (9) масштабних коефіцієнтів N1 і N2. У результаті одержимо рівняння:
 (16)
Відповідно до формул (10) різниці координат ХГS2 і XГS1, ZГS2 і ZГS1 позначені через Bx Bz. Аналогічно різницю ординат YГS2 і YГS1 позначимо через Вy. Величини Bx, By, Bz - проекції базису фотографування (відстані між центрами проекцій S1 і S2). Звичайно
(16)
Відповідно до формул (10) різниці координат ХГS2 і XГS1, ZГS2 і ZГS1 позначені через Bx Bz. Аналогічно різницю ординат YГS2 і YГS1 позначимо через Вy. Величини Bx, By, Bz - проекції базису фотографування (відстані між центрами проекцій S1 і S2). Звичайно  . Тому на цю величину зменшимо кожне з трьох доданків у лівій частині рівняння (16).
Відносини By/Bx і Bz/Bx визначають кути, від яких залежить напрямок базису фотографування в системі координат OГXГYГZГ. Згідно рис.2 маємо:
. Тому на цю величину зменшимо кожне з трьох доданків у лівій частині рівняння (16).
Відносини By/Bx і Bz/Bx визначають кути, від яких залежить напрямок базису фотографування в системі координат OГXГYГZГ. Згідно рис.2 маємо:
 (17)
Позначимо рівняння (16) через Fq Тоді з урахуванням рівностей (17) воно прийме вид
(17)
Позначимо рівняння (16) через Fq Тоді з урахуванням рівностей (17) воно прийме вид
 (18)
(18)
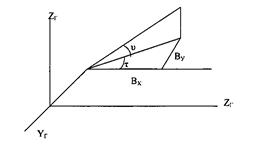 Рис. 2
Припустимо, що елементи зовнішнього орієнтування першого знімка визначені так, як викладено вище, а саме з використанням опорних точок. Тоді в рівнянні (18) залишається п'ять невідомих величин - кути α2, ω2, κ2, τ і υ. Функціями кутів α2, ω2, κ2 є просторові координати X21, Y21, Z21 (формули 3 - 5). За значеннями кутів τ і υ визначаються величини Вy і Вz при відомому значенні складової базису Bx. При цих умовах можливе визначення лінійних елементів орієнтування другого знімка стереопари:
Рис. 2
Припустимо, що елементи зовнішнього орієнтування першого знімка визначені так, як викладено вище, а саме з використанням опорних точок. Тоді в рівнянні (18) залишається п'ять невідомих величин - кути α2, ω2, κ2, τ і υ. Функціями кутів α2, ω2, κ2 є просторові координати X21, Y21, Z21 (формули 3 - 5). За значеннями кутів τ і υ визначаються величини Вy і Вz при відомому значенні складової базису Bx. При цих умовах можливе визначення лінійних елементів орієнтування другого знімка стереопари:
 (19)
Рівняння (18) вирішуються аналогічно визначенню елементів зовнішнього орієнтування знімка. Відмінною рисою є те, що в якості обмірюваних величин використовуються обмірювані координати відповідних точок x1,y1 на першому знімку і x2, y2 - на другому. Крім того, відповідно до формул (3), у цьому вирішенні необхідно знати елементи внутрішнього орієнтування знімків f, x0, y0 (вище прийнята умова, що х0 = у0 = 0).
Щоб визначити п'ять величин, виміряються координати шести пар відповідних точок, розташованих у кутах перекриття знімків і поблизу їхніх головних точок.
(19)
Рівняння (18) вирішуються аналогічно визначенню елементів зовнішнього орієнтування знімка. Відмінною рисою є те, що в якості обмірюваних величин використовуються обмірювані координати відповідних точок x1,y1 на першому знімку і x2, y2 - на другому. Крім того, відповідно до формул (3), у цьому вирішенні необхідно знати елементи внутрішнього орієнтування знімків f, x0, y0 (вище прийнята умова, що х0 = у0 = 0).
Щоб визначити п'ять величин, виміряються координати шести пар відповідних точок, розташованих у кутах перекриття знімків і поблизу їхніх головних точок.
 (20)
Різниці координатних центрів проекцій замінимо складовими базису, значення яких необхідно визначити. Крім того, усі члени цих рівнянь зменшимо в Z1I Z2I рaз. Тоді одержимо:
(20)
Різниці координатних центрів проекцій замінимо складовими базису, значення яких необхідно визначити. Крім того, усі члени цих рівнянь зменшимо в Z1I Z2I рaз. Тоді одержимо:
 (21)
Якщо лінійні і кутові елементи зовнішнього орієнтування першого знімка стереопари отримані з рішення системи рівнянь виду (13), а кутові елементи орієнтування другого знімка обчислені відповідно до рівняння (16), то в рівняннях (21) невідомі тільки величини Bx, By i Bz, тому що просторові координати XiI YiI ZiI (i = 1,2) обчислюються за формулами (3) - (5) по обмірюваних координатах, елементах внутрішнього орієнтування і значеннях кутів α, ω, κ.
Для визначення значень Bx, By i Bz можна скористатися висотами ZГ чотирьох опорних точок у кутах стереопари. У цьому випадку три невідомі величини визначаються з восьми рівнянь по способу найменших квадратів. Рівняння (21) лінійні по відношенню обумовлених величин Bx, By i Bz. Тому система рівнянь вирішується по способу найменших квадратів. Координати центра проекції XГS2,YГS2,ZГS2 обчислюються за формулами (19). При цьому формули (17) можуть бути використані для контролю виконаних обчислень.
1.2. Наближені рішення фотограмметричних задач
1.3.1. Призначення й умови наближених рішень
(21)
Якщо лінійні і кутові елементи зовнішнього орієнтування першого знімка стереопари отримані з рішення системи рівнянь виду (13), а кутові елементи орієнтування другого знімка обчислені відповідно до рівняння (16), то в рівняннях (21) невідомі тільки величини Bx, By i Bz, тому що просторові координати XiI YiI ZiI (i = 1,2) обчислюються за формулами (3) - (5) по обмірюваних координатах, елементах внутрішнього орієнтування і значеннях кутів α, ω, κ.
Для визначення значень Bx, By i Bz можна скористатися висотами ZГ чотирьох опорних точок у кутах стереопари. У цьому випадку три невідомі величини визначаються з восьми рівнянь по способу найменших квадратів. Рівняння (21) лінійні по відношенню обумовлених величин Bx, By i Bz. Тому система рівнянь вирішується по способу найменших квадратів. Координати центра проекції XГS2,YГS2,ZГS2 обчислюються за формулами (19). При цьому формули (17) можуть бути використані для контролю виконаних обчислень.
1.2. Наближені рішення фотограмметричних задач
1.3.1. Призначення й умови наближених рішень
 (49)
(49)
 (50)
де х, у - обмірювані на знімку координати, мм;
f— фокусна відстань знімка, мм;
XГS, YГS, ZГS, α, ω, k- лінійні (в м) і кутові (у радіанах) елементи зовнішнього орієнтування знімка, обчислені по координатах опорних точок;
ZГ - висота точки, що визначається, м.
При наближеному вирішенні задачі по знімках стереопар строгі залежності (11), (12) перетворяться заміною просторових координат точок знімків і їхніх відносин наближеними залежностями (22) і (41). У результаті маємо:
(50)
де х, у - обмірювані на знімку координати, мм;
f— фокусна відстань знімка, мм;
XГS, YГS, ZГS, α, ω, k- лінійні (в м) і кутові (у радіанах) елементи зовнішнього орієнтування знімка, обчислені по координатах опорних точок;
ZГ - висота точки, що визначається, м.
При наближеному вирішенні задачі по знімках стереопар строгі залежності (11), (12) перетворяться заміною просторових координат точок знімків і їхніх відносин наближеними залежностями (22) і (41). У результаті маємо:
 (51)
де
(51)
де  (52)
У формулах (51), (52):
x1 , y1 - обмірювані координати на першому знімку стереопари, мм;
p - обмірюваний подовжній паралакс відповідних точок на знімках стереопари, мм;
f - фокусна відстань знімка, мм;
XГS1, YГS1, ZГS1 - лінійні елементи зовнішнього орієнтування першого знімків стереопари, м;
αi, ωi, κi (i =1, 2) кутові елементи орієнтування знімків стереопари, радіани;
BX, BZ - складові базиси фотографування, м.
Формулами (50) і (51) визначається положення точок місцевості в тій системі координат, у якій визначене положення опорних точок і, отже, виконане орієнтування знімків (проектирующих променів).
2. Лабораторна робота
2.1. Тема: Фотограмметричні визначення аналітичним способом по одиночних знімках і стереоскопічних парах.
2.2. Призначення: Вивчити зміст процесів, виконуваних при фотограмметричних визначеннях, склад і призначення вихідних даних, можливості й умови визначення положення точок місцевості з використанням одиночних знімків і стереоскопічних пар.
2.3. Завдання.
(52)
У формулах (51), (52):
x1 , y1 - обмірювані координати на першому знімку стереопари, мм;
p - обмірюваний подовжній паралакс відповідних точок на знімках стереопари, мм;
f - фокусна відстань знімка, мм;
XГS1, YГS1, ZГS1 - лінійні елементи зовнішнього орієнтування першого знімків стереопари, м;
αi, ωi, κi (i =1, 2) кутові елементи орієнтування знімків стереопари, радіани;
BX, BZ - складові базиси фотографування, м.
Формулами (50) і (51) визначається положення точок місцевості в тій системі координат, у якій визначене положення опорних точок і, отже, виконане орієнтування знімків (проектирующих променів).
2. Лабораторна робота
2.1. Тема: Фотограмметричні визначення аналітичним способом по одиночних знімках і стереоскопічних парах.
2.2. Призначення: Вивчити зміст процесів, виконуваних при фотограмметричних визначеннях, склад і призначення вихідних даних, можливості й умови визначення положення точок місцевості з використанням одиночних знімків і стереоскопічних пар.
2.3. Завдання.
 (45)
У підрядкових індексах формул (45) збережені позначення опорних точок на рис.4.
Стосовно до кожної з 4-х опорних точок складається два рівняння виправлень виду (44). Тому що рівнянь вісім, а обумовлених величин три, то задача вирішується під умовою:
[νpνp]+ [νqνq] = min
Завдяки використанню стандартного розташування точок результат виходить у виді наступних формул:
(45)
У підрядкових індексах формул (45) збережені позначення опорних точок на рис.4.
Стосовно до кожної з 4-х опорних точок складається два рівняння виправлень виду (44). Тому що рівнянь вісім, а обумовлених величин три, то задача вирішується під умовою:
[νpνp]+ [νqνq] = min
Завдяки використанню стандартного розташування точок результат виходить у виді наступних формул:
 (46)
(46)
 (47)
(47)
 (48)
де lpi i lqi - вільні члени рівнянь виправлень (44), що обчислюються по формулах (42); i =3,4,5,6.
У підрядкових індексах формул (46)-(48) позначені номери опорних точок (мал.4).
Лінійні елементи зовнішнього орієнтування другого знімка XГS2, YГS2, ZГS2 обчислюються за значеннями XГS1, YГS1, ZГS1 і Вх, BУ, BZ відповідно до формул (19).
1.3.5. Наближені визначення координат точок місцевості
У наближених визначеннях фотограмметричних координат точок місцевості використовуються залежності (7) і (11), (12), відповідно при використанні одиночного знімка і стереоскопічної пари.
У наближеному варіанті строгі формули (7) перетворяться за допомогою заміни відносин XI/ZI YI/ZI відповідно до виразів (41):
(48)
де lpi i lqi - вільні члени рівнянь виправлень (44), що обчислюються по формулах (42); i =3,4,5,6.
У підрядкових індексах формул (46)-(48) позначені номери опорних точок (мал.4).
Лінійні елементи зовнішнього орієнтування другого знімка XГS2, YГS2, ZГS2 обчислюються за значеннями XГS1, YГS1, ZГS1 і Вх, BУ, BZ відповідно до формул (19).
1.3.5. Наближені визначення координат точок місцевості
У наближених визначеннях фотограмметричних координат точок місцевості використовуються залежності (7) і (11), (12), відповідно при використанні одиночного знімка і стереоскопічної пари.
У наближеному варіанті строгі формули (7) перетворяться за допомогою заміни відносин XI/ZI YI/ZI відповідно до виразів (41):
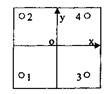
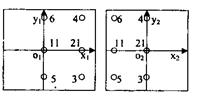 Рис. 3 Рис. 4
1.3.2. Наближені рішення по визначенню елементів зовнішнього орієнтування знімка
Для визначення елементів зовнішнього орієнтування одиночного знімка скористаємося наближеними зв'язками координат точок місцевості і їхніх зображень на знімку. Для цього строгі залежності (3) - (5) замінимо наближеними:
Рис. 3 Рис. 4
1.3.2. Наближені рішення по визначенню елементів зовнішнього орієнтування знімка
Для визначення елементів зовнішнього орієнтування одиночного знімка скористаємося наближеними зв'язками координат точок місцевості і їхніх зображень на знімку. Для цього строгі залежності (3) - (5) замінимо наближеними:
 і
і  (22)
Тоді рівняння (13) приймуть вид:
(22)
Тоді рівняння (13) приймуть вид:
 (23)
У цих наближених рівняннях у явному виді представлені зв'язки величин, що визначаються з обмірюваними (х, у) і заданими (ХГ, YГ, ZГ, f) величинами.
Щоб спростити вирішення задачі, обумовлені елементи орієнтування знімка, що визначаються, запишемо у виді суми наближеного значення і виправлення:
(23)
У цих наближених рівняннях у явному виді представлені зв'язки величин, що визначаються з обмірюваними (х, у) і заданими (ХГ, YГ, ZГ, f) величинами.
Щоб спростити вирішення задачі, обумовлені елементи орієнтування знімка, що визначаються, запишемо у виді суми наближеного значення і виправлення:
 XГS=(XГS)+δXS; YГS=(YГS)+δYS; ZГS=(ZГS)+δZS;
(24)
a = (α)+δα; ω-= (ω)+δω; κ = (κ)+δκ.
Тоді рівняння (23), як і рівняння (14) у строгому рішенні, складаються з двох частин - наближених значень функцій Fx і Fy і виправлень до них. Зі збереженням членів першого порядку малості (порядок малості визначається ступенем малих величин — виправлень і кутів, і їхніх добутків) і з урахуванням формул (24) рівняння (23) мають вид:
XГS=(XГS)+δXS; YГS=(YГS)+δYS; ZГS=(ZГS)+δZS;
(24)
a = (α)+δα; ω-= (ω)+δω; κ = (κ)+δκ.
Тоді рівняння (23), як і рівняння (14) у строгому рішенні, складаються з двох частин - наближених значень функцій Fx і Fy і виправлень до них. Зі збереженням членів першого порядку малості (порядок малості визначається ступенем малих величин — виправлень і кутів, і їхніх добутків) і з урахуванням формул (24) рівняння (23) мають вид:
 (41)
де i = 1,2.
Відповідно до прийнятих умов треті доданки у формулах (21) є відомими величинами, тому що просторові координати точок знімків обчислюються по формулах (41) по обмірюваних координатах х і у, кутовим елементам α, ω, k і з фокусною відстанню f, а висоти опорної точки ZГ і центра проекції ZГSl, відомі.
Позначимо останні члени формул (21) через lp i lq, і запишемо їх вираження з урахуванням формул (41):
(41)
де i = 1,2.
Відповідно до прийнятих умов треті доданки у формулах (21) є відомими величинами, тому що просторові координати точок знімків обчислюються по формулах (41) по обмірюваних координатах х і у, кутовим елементам α, ω, k і з фокусною відстанню f, а висоти опорної точки ZГ і центра проекції ZГSl, відомі.
Позначимо останні члени формул (21) через lp i lq, і запишемо їх вираження з урахуванням формул (41):
 (42)
де p - подовжній паралакс відповідних точок на парі знімків, обумовлений різницею абсцис х1 і х2:
р=х1 -x2 (43)
Тому що в наближених формулах (41) і (42) збережені члени не вище першого порядку малості, а величина ВZ є малoю (у порівнянні з BX і з (ZГ-ZГS1), то у вихідних рівняннях (21) у добутках BZ(X2I/Z2I) i BZ(Y2I/Z2I) співвідношення просторових координат замінимо відповідно до формул (41), відкинувши в них члени, що залежать від кутів α, ω, k.
У результаті вихідні рівняння в наближеному записі приймуть вид:
(42)
де p - подовжній паралакс відповідних точок на парі знімків, обумовлений різницею абсцис х1 і х2:
р=х1 -x2 (43)
Тому що в наближених формулах (41) і (42) збережені члени не вище першого порядку малості, а величина ВZ є малoю (у порівнянні з BX і з (ZГ-ZГS1), то у вихідних рівняннях (21) у добутках BZ(X2I/Z2I) i BZ(Y2I/Z2I) співвідношення просторових координат замінимо відповідно до формул (41), відкинувши в них члени, що залежать від кутів α, ω, k.
У результаті вихідні рівняння в наближеному записі приймуть вид:
 (44)
У правій частині формул (44) замість нулів поставлені виправлення νp і νq, тому, що вільні члени lP i lP визначаються не тільки з використанням наближених залежностей, але і з обмірюваними величинами, що містять помилки.
Для визначення трьох невідомих Вх, By, Bz скористаємося висотами чотирьох опорних точок, розташованих на знімках у кутах стереопари так,
(44)
У правій частині формул (44) замість нулів поставлені виправлення νp і νq, тому, що вільні члени lP i lP визначаються не тільки з використанням наближених залежностей, але і з обмірюваними величинами, що містять помилки.
Для визначення трьох невідомих Вх, By, Bz скористаємося висотами чотирьох опорних точок, розташованих на знімках у кутах стереопари так, (40)
У формулах (40) кутові елементи виражені в радіанах.
1.3.4. Наближені визначення лінійних елементів зовнішнього орієнтування другого знімка стереопари
Лінійні елементи орієнтування другого знімка стереопари XГS2, YГS2, ZГS2 визначимо стосовно до умов, коли відомі елементи зовнішнього орієнтування першого знімка і кутові елементи другого знімка стереопари. Для цього скористаємося рівняннями (21), попередньо записавши їх у наближеному виді. З цією метою просторові координати відповідних точок знімка замінимо плоскими (обмірюваними) координатами відповідно до формул (22). При цьому відносини просторових координат характеризуються наступними наближеними формулами:
(40)
У формулах (40) кутові елементи виражені в радіанах.
1.3.4. Наближені визначення лінійних елементів зовнішнього орієнтування другого знімка стереопари
Лінійні елементи орієнтування другого знімка стереопари XГS2, YГS2, ZГS2 визначимо стосовно до умов, коли відомі елементи зовнішнього орієнтування першого знімка і кутові елементи другого знімка стереопари. Для цього скористаємося рівняннями (21), попередньо записавши їх у наближеному виді. З цією метою просторові координати відповідних точок знімка замінимо плоскими (обмірюваними) координатами відповідно до формул (22). При цьому відносини просторових координат характеризуються наступними наближеними формулами:
 (25)
де lX і lY - наближені значення функцій FX і FY:
lХ = (FX) = (XS)+N x -XГ;
(26)
lY = (FY) = (YS)-N y -YГ
У рівняннях (25) через Н позначено висоту фотографування:
Н = -(ZГ - ZГS) (27)
а у формулах (26) N - масштабний коефіцієнт:
N = - (1 / f)(ZГ - ZГS) (28)
Наближені значення функцій (FX) і (FY) обчислюються з використанням наближених значень елементів орієнтування знімків і відомих значень величин х, у, XГ,YГ,ZГ.
Наближені значення лінійних елементів орієнтування обчислюються як і при строгому рішенні:
(25)
де lX і lY - наближені значення функцій FX і FY:
lХ = (FX) = (XS)+N x -XГ;
(26)
lY = (FY) = (YS)-N y -YГ
У рівняннях (25) через Н позначено висоту фотографування:
Н = -(ZГ - ZГS) (27)
а у формулах (26) N - масштабний коефіцієнт:
N = - (1 / f)(ZГ - ZГS) (28)
Наближені значення функцій (FX) і (FY) обчислюються з використанням наближених значень елементів орієнтування знімків і відомих значень величин х, у, XГ,YГ,ZГ.
Наближені значення лінійних елементів орієнтування обчислюються як і при строгому рішенні:
 (29)
I
де ХГi, YГi (і = 1,2,3,4) - планові координати чотирьох опорних точок (мал.3); ZГ1 - висота опорної точки 1 (рис.3).
З наближеним значенням (ZГS) обчислюється масштабний коефіцієнт N:
N=(-l/f)(ZГS -ZГ i -fm10-3 ) або N=(l/f)[fm 10-3-(ZГS -ZГ i)]; (30)
де ZГі - висоти опорних точок 1 - 4 (рис.3).
При обчисленні наближених значень функцій (FX) і (FY) кутові елементи α, ω, i κ прирівнюються до нуля:
(α) = (ω) = (к) = 0. (31)
Стосовно до цієї умови записані формули (26).
(29)
I
де ХГi, YГi (і = 1,2,3,4) - планові координати чотирьох опорних точок (мал.3); ZГ1 - висота опорної точки 1 (рис.3).
З наближеним значенням (ZГS) обчислюється масштабний коефіцієнт N:
N=(-l/f)(ZГS -ZГ i -fm10-3 ) або N=(l/f)[fm 10-3-(ZГS -ZГ i)]; (30)
де ZГі - висоти опорних точок 1 - 4 (рис.3).
При обчисленні наближених значень функцій (FX) і (FY) кутові елементи α, ω, i κ прирівнюються до нуля:
(α) = (ω) = (к) = 0. (31)
Стосовно до цієї умови записані формули (26).
 2015-05-13
2015-05-13 525
525







