Практическое применение атомного силового микроскопа
В сравнении с растровым электронным микроскопом (РЭМ) атомно-силовой микроскоп обладает рядом преимуществ. Так, в отличие от РЭМ, который даёт псевдотрёхмерное изображение поверхности образца, АСМ позволяет получить истинно трёхмерный рельеф поверхности. Кроме того, непроводящая поверхность, рассматриваемая с помощью АСМ, не требует нанесения проводящего металлического покрытия, которое часто приводит к заметной деформации поверхности. Для нормальной работы РЭМ требуется вакуум, в то время как большинство режимов АСМ могут быть реализованы на воздухе или даже в жидкости. Данное обстоятельство открывает возможность изучения биомакромолекул и живых клеток. В принципе, АСМ способен дать более высокое разрешение чем РЭМ. Так было показано, что АСМ в состоянии обеспечить реальное атомное разрешение в условиях сверхвысокого вакуума. Сверхвысоковакуумный АСМ по разрешению сравним со сканирующим туннельным микроскопом и просвечивающим электронным микроскопом. К недостатку АСМ при его сравнении с РЭМ также следует отнести небольшой размер поля сканирования. РЭМ в состоянии просканировать область поверхности размером в несколько миллиметров в латеральной плоскости с перепадом высот в несколько миллиметров в вертикальной плоскости. У АСМ максимальный перепад высот составляет несколько микрон, а максимальное поле сканирования в лучшем случае порядка 150×150 микрон². Другая проблема заключается в том, что при высоком разрешении качество изображения определяется радиусом кривизны кончика зонда, что при неправильном выборе зонда приводит к появлению артефактов на получаемом изображении. Обычный АСМ не в состоянии сканировать поверхность также быстро, как это делает РЭМ. Для получения АСМ-изображения, как правило, требуется несколько минут, в то время как РЭМ после откачки способен работать практически в реальном масштабе времени, хотя и с относительно невысоким качеством. Из-за низкой скорости развёртки АСМ получаемые изображения оказываются искажёнными тепловым дрейфом, что уменьшает точность измерения элементов сканируемого рельефа. Для увеличения быстродействия АСМ было предложено несколько конструкций, среди которых можно выделить зондовый микроскоп, названный видеоАСМ. ВидеоАСМ обеспечивает получение удовлетворительного качества изображений поверхности с частотой телевизионной развёртки, что даже быстрее, чем на обычном РЭМ. Кроме термодрейфа АСМ-изображения могут также быть искажены гистерезисом пьезокерамического материала сканера и перекрёстными паразитными связями, действующими между X, Y, Z-элементами сканера. Для исправления искажений в реальном масштабе времени современные АСМ используют программное обеспечение либо сканеры, снабжённые замкнутыми следящими системами, в состав которых входят линейные датчики положения. Некоторые АСМ вместо сканера в виде пьезотрубки используют XY и Z-элементы, механически несвязанные друг с другом, что позволяет исключить часть паразитных связей. АСМ можно использовать для определения типа атома в кристаллической решётке. Манипулятор АСМ и СТМ позволяет при габаритах в несколько сантиметров передвигать иглу с разрешением лучше 0,1 Ǻ. Если бы промышленный робот обладал подобной точностью перемещений при габаритах около метра, то иголкой, зажатой в манипуляторах, он мог бы нарисовать окружность диаметром в несколько нанометров. Температурный коэффициент линейного расширения большинства материалов около Кантиле́вер(англ. cantilever — кронштейн, консоль) — устоявшееся название наиболее распространенной в сканирующей атомно-силовой микроскопии конструкции микромеханического зонда. Кантилевер представляет собой массивное прямоугольное основание, размерами примерно 1,5×3,5×0,5 мм, с выступающей из него балкой (собственно кантилевером), шириной порядка 0,03 мм и длиной от 0,1 до 0,5 мм. Одна из сторон балки является зеркальной (иногда для усиления отражённого лазерного сигнала на неё напыляют тонкий слой алюминия), что позволяет использовать оптическую систему контроля изгиба кантилевера. На противоположной стороне балки на свободном конце находится игла, взаимодействующая с измеряемым образцом. Форма иглы может значительно изменяться в зависимости от способа изготовления. Радиус острия иглы промышленных кантилеверов находится в пределах 5—90 нм, лабораторных — от 1 нм. Как правило, вся конструкция, за исключением, быть может, иглы, является кремниевым монокристаллом. Также кантилеверы изготавливают из нитрида кремния (Si3N4) или полимеров. Процесс производства схож с производством кремниевого электронного оборудования, и включает сухое либо жидкофазное вытравливание подложки. Таким образом, кантилеверы удобны для массового производства. При разработке кантилеверов используют следующие два уравнения, которые являются ключевыми для понимания принципа работы кантилеверов. Отклонение балки регистрируется чувствительными оптическими и емкостными датчиками. Коэффициент упругости связан с резонансной частотой кантилевера по закону гармонического осциллятора. Изменение силы, приложенной к кантилеверу может привести с сдвигу резонансной частоты. Сдвиг частоты может быть измерен с большой точностью по принципу гетеродина. Одной из важных проблем при практическом использовании кантилевера является проблема квадратичной и кубической зависимости свойств кантилевера от его размеров. Эти нелинейные зависимости означают, что кантилеверы довольно чувствительны к изменению параметров процесса. Контроль остаточной деформации также может представлять сложность.
Рис. 5.4 Молекулы на зонде взаимодействуют с отдельными частями молекул на образце
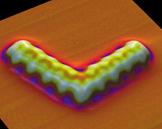
Рис. 5.5 Полученное изображение фрагмента образца. С помощью АСМ может осуществляться сбрка молекул из отдельных атомов.
Рис. 5.6 Молекула, из 18 атомов цезия и 18 атомов йода собрана путем последовательного присоединения отдельных атомов в АСМ. |
 . При размерах манипулятора в несколько сантиметров изменение температуры на 0,01° приводит к перемещению иглы вследствие теплового дрейфа на 1 Ǻ.
. При размерах манипулятора в несколько сантиметров изменение температуры на 0,01° приводит к перемещению иглы вследствие теплового дрейфа на 1 Ǻ.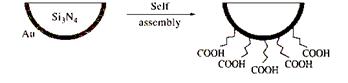









 8281
8281 8033
8033