2015-05-30
2015-05-30 2016
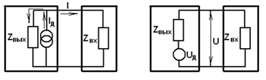
2016Выходное сопротивление ПИП (выходной импеданс) характеризует реакцию его выходного сигнала на подключение к его выходу фиксированной нагрузки. Преобразователь (датчик) с выходной стороны бывает нагружен входным сопротивлением (импедансом) последующего измерительного преобразователя. Выходные и входные импедансы, как правило, имеют активные и реактивные составляющие и представляются в комплексном виде. Для наиболее эффективного использования преобразователей необходимо согласование выходного сопротивления (импеданса) данного датчика с входным сопротивлением (импедансом) последующего преобразователя. Для минимизации искажений выходного сигнала датчика с токовым выходом (рис. 1.3 а) последующий за ним преобразователь должен иметь минимальный входной импеданс. Если датчик имеет потенциальный выход (рис. 1.3 б), он должен обладать минимальным выходным импедансом, а последующий преобразователь – большим входным импедансом.