 2015-06-10
2015-06-10 1998
1998Для моделирования автоматизированного электропривода воспользуемся пакетом Matlab. Данный пакет имеет в своем составе библиотеку Simulink, которая позволяет создавать модели описанные математическими уравнениями с помощью различных звеньев.
Благодаря встроенным математическим функциям, описывающим разные электрические процессы, путём задания параметров двигателя и преобразователя можно смоделировать объект и систему управления.
В качестве задатчика интенсивности возьмём специальный блок Look-UpTable (рис.5.2), который параметрируется таким образом, что на его выходе получаем линейно нарастающую прямую до необходимого значения. В результате этого получаем имитацию увеличения частоты питающего напряжения и, следовательно, разгон двигателя. На блок Voltage подаются сигналы, формируемые имитирующей моделью преобразователя частоты, которые преобразуются в питающее напряжение и поступают на фазы двигателя. Для имитации торможения используется Look-UpTable с линейно спадающей прямой.
В преобразователе частоты имеется усилитель, интегратор, генератор синусоидальных сигналов, умножитель и сумматор.
Объект управления параметрируется в соответствии с расчётными данными и выбранными элементами. Результаты моделирования выводятся на специальный дисплей.
Схема моделирования приведена на рисунке 5.1.Схема реализации задатчика интенсивности приведена на рисунке 5.2.
Анализ динамических характеристик электропривода.
Характеристики представлены на рисунках 6.1 и 6.2.
Заключение
В результате проделанной работы был выполнен расчёт электродвигателя, осуществлён выбор системы управления, произведён анализ динамических характеристик. Была выбрана система преобразователь частоты – асинхронный двигатель так как наиболее простым, дешёвым и надёжным электрическим двигателем является асинхронный короткозамкнутый двигатель. Возможности регулирования в этой системе обеспечиваются путём изменения частоты напряжения и тока статорной обмотки. Для реализации этих возможностей осуществляется питание статорной обмотки двигателя от управляемого преобразователя частоты. Был выбран оптимальный для требуемых условий закон частотного регулирования.
Составленная модель позволяет наглядно изучить переходные процессы в протекающие в системе и правильно подобрать необходимые параметры силового оборудования и системы управления им.
Таким образом, спроектированная установка отвечает техническим и технологическим требованиям, но так как была выбрана жёсткая циклограмма, это не до конца позволяет оценить реальные процессы, происходящие в электроприводе.
Реализация задатчика интенсивности
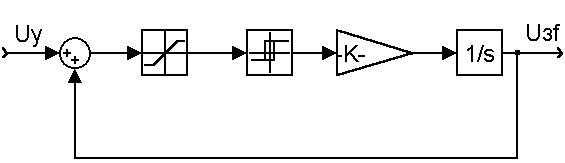
Рис. 5.2
Блок Saturation обеспечивает линейное нарастание сигнала, релейный блок выполняет функцию ограничения сигнала, коэффициент -К- служит для регулировки интенсивности нарастания, то есть достижения необходимой скорости двигателя с определённым ускорением. На вход задатчика интенсивности подаётся ступенчатый сигнал U управления, который суммируется с выходным сигналом интегратора. На выходе задатчика получаем сигнал управления, который поступает на регулятор частоты и функциональный преобразователь.








