 2015-06-04
2015-06-04 5130
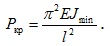
5130Задача определения критической силы для сжатого стержня впервые была решена в 1744 году выдающимся математиком Леонардом Эйлером. Формула для критической силы была выведена Эйлером на примере идеального прямого стержня постоянного сечения, шарнирно закрепленного на концах (Рис.2).
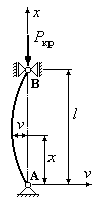
рис.2
Одна из опор стержня допускает возможность продольного перемещения соответствующего конца стержня. Собственный вес стержня не учитывалась. Искомая формула выглядела:
 (2)
(2)
Формула Эйлера (2) для критической силы выводилась для стержня с шарнирным закрепления концов. Этот случай закрепления концов стержня принято называть основным случаем. В этом случае на длине стержня укладывается одна полуволна синусоиды. Однако, в практике встречаются различные другие случаи закрепления концов стержня. На рис.3 приведены некоторые из них, которые наиболее часто встречаются.
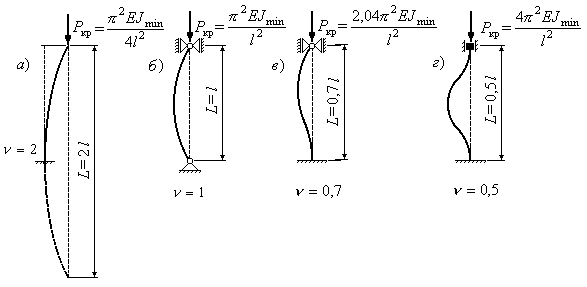
рис.3
Для определения значения критической силы для каждого из приведенных случаев закрепления концов на практике применяется способ, который использует геометрическую аналогию между поведением упругой линии сжатого стержня с шарнирным закреплением концов (основной случай) и другим способом закрепления концов стержня. Согласно этим способом все остальные случаев закрепления концов стержня сводится к основному путем введения так называемой сводной или свободной длины стержня.
Сводной или свободной длиной стержня называется условная длина шарнирно закрепленного стержня, имеет такую же критическую силу, как и стержень с заданным закреплением концов. Судить о сводную длину стержня можно по числу полуволн, которые укладываются на длине стержня. С геометрической аналогии следует, что в пределах сводной длины стержень с произвольным закреплением концов вести себя так же, как стержень с шарнирным закреплением концов.
Сводная длина стержня вычисляется следующим образом:, где длина стержня с заданным закреплением концов; коэффициент сводной длины.
Из определения сводной длины следует, что коэффициент есть такое число, на которое необходимо умножить длину стержня с заданным закреплением концов, чтобы получить такую длину условного стержня с шарнирным закреплением концов, на котором заключается одна полуволна синусоиды.
Для стержня, изображенного на рис.3, а длина условного стержня с шарнирным закреплением концов должно быть в два раза больше, чем заданная длина стержня. Верхняя часть условного стержня с шарнирным закреплением концов вести себя точно так же, как и стержень с заданным закреплением концов. Коэффициент возведения длины для этого случая равна. На рис.3, в одна полуволна размещается на длине, составляющей 0,7 реальной длины стержня. Коэффициент возведения длины в этом случае составляет. Для случая жесткого закрепления обоих концов стержня (Рис.3, г) длина полуволны, замеренная между двумя точками перегиба, составляет половину длины стержня. Для этого случая коэффициент. Для основного случая (Рис.3, б) коэффициент, поскольку на его длине укладывается одна полуволна и, следовательно, сведена длина стержня равна реальной его длине.
Преобразуем формулу Эйлера (2), подставляя в нее вместо реальной длины стержня сводную длину. Получаем формулу Эйлера для критической силы в окончательном виде:
|
|
|
|
|
|
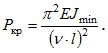 (3)
(3)
На рис.3 приведены значения критической силы для стержней с различными условиями закрепления концов при одинаковых начальной длине и жесткости поперечного сечения. Следует отметить, что наибольшее значение критическая сила достигает для стержня с жестким закреплением концов (Рис.3, г). В этом случае критическая сила оказывается в четыре раза больше, чем для основного случае закрепления концов. Наименее эффективным типом закрепления концов стержня является случай, приведенный на рис.3, а. Критическая сила в этом случае оказывается в четыре раза меньше, чем для основного случая.
6.Структурный анализ плоского механизма. Формула Чебышева
Механизмом называется механическая система тел, в которой заданныедвижения одного или нескольких тел преобразуются в необходимое движениедругих тел. Таким образом, механизмы служат для преобразованиядвижения.
Механизмы часто являются составной частью машины (см. определение ма-шины в [1]) преобразуя движение ее двигателя
в необходимое движение рабочего органа.
Рассмотрим структуру механизма на примере
кривошипно-ползунного механизма (рис.1).
Механизм состоит из звеньев 1, 2, 3 и 4
которые представляют одну деталь или груп-
пу жестко соединенных деталей, имеющих
общий закон движения.
Звено 1 – ведущее звено, закон движе-
ния которого задан. Это звено также называют
входным звеном. Оно всегда обозначается со
стрелкой.
Звенья 2, 3 – ведомые звенья; звено 3 – называют также исполнительным
или выходным звеном. Оно совершает движение для получения, которого по-
лучен механизм.
Звено 4 – стойка или базовое звено, на котором устанавливаются осталь-
ные звенья. Движение всех звеньев в механизме рассматривается относительно
стойки.








