 2015-06-05
2015-06-05 20955
20955Структурной схемой системы автоматического управления называют графическое представление ее математической модели в виде соединений звеньев, изображаемых в виде прямоугольников или окружностей (для сумматора), с указанием входных и выходных переменных. Обычно внутри прямоугольника указывается условное обозначение оператора, изображаемого им звена, а сам оператор в виде передаточной функции или дифференциального уравнения задается вне структурной схемы.
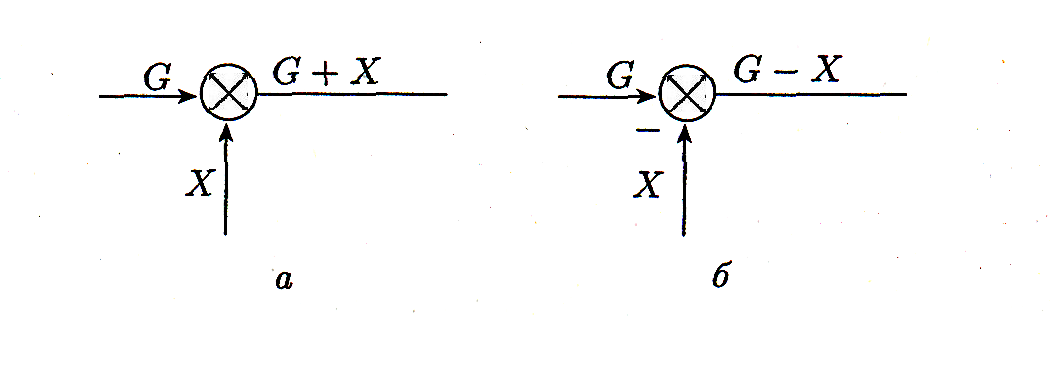
Рис. 1.
В сумматоре входные переменные складываются (рис. 1 а). Однако если перед каким-либо входом стоит знак минус, переменная по этому входу вычитается (складывается со знаком минус) (рис. 1 б).
Преобразование структурных схем. Рассмотрим основные типы соединений и правила их преобразования. Звенья будем описывать передаточной функцией в изображениях Лапласа. При этом для краткости записи аргументы передаточных функций и переменных будем опускать.
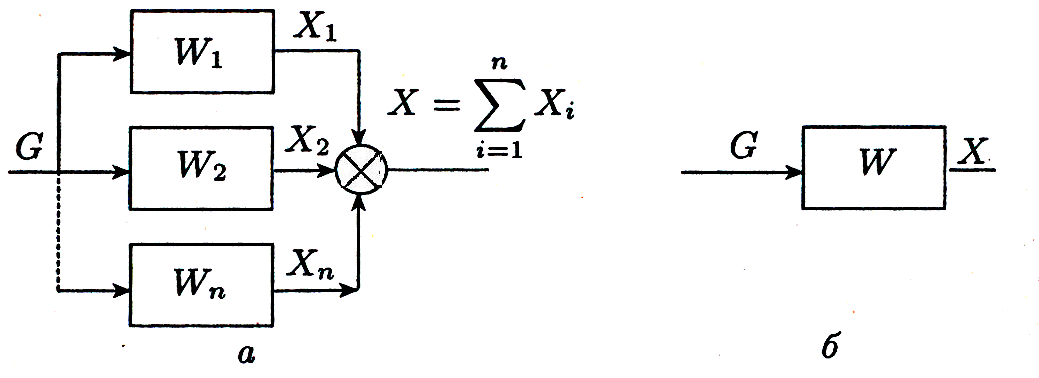
Параллельное соединение. Так называется соединение, при котором на входы всех звеньев подается одно и то же воздействие, а их выходные переменные складываются (рис.3 а). При параллельном соединении звеньев передаточные функции складываются, и при преобразовании их можно заменить одним звеном с передаточной функцией  (рис.3б).
(рис.3б).
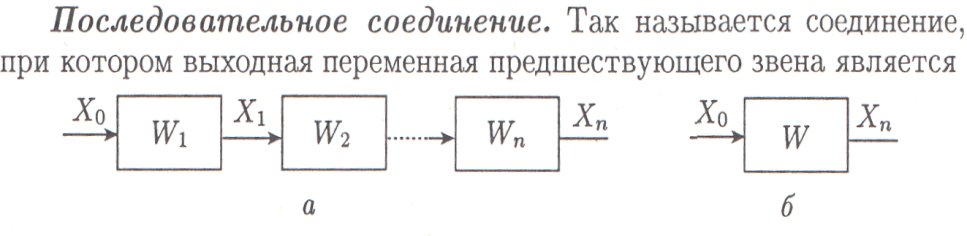
Последовательное соединение. Так называется соединение, при котором выходная переменная предшествующего звена является входной переменной последующего звена (рис.2 а). При последовательном соединении передаточные функции отдельных звеньев перемножаются, и при преобразовании структурных схем цепочку из последовательно соединенных звеньев можно заменить одним звеном с передаточной функцией W(s) = W1(s)W2(s)... Wn(s) (рис.2 б). Рис. 2.
Если выход какого-либо звена поступает на сумматор с отрицательным знаком, то передаточная функция этого звена складывается с отрицательным знаком, т.е. вычитается.
а б
Рис.3.
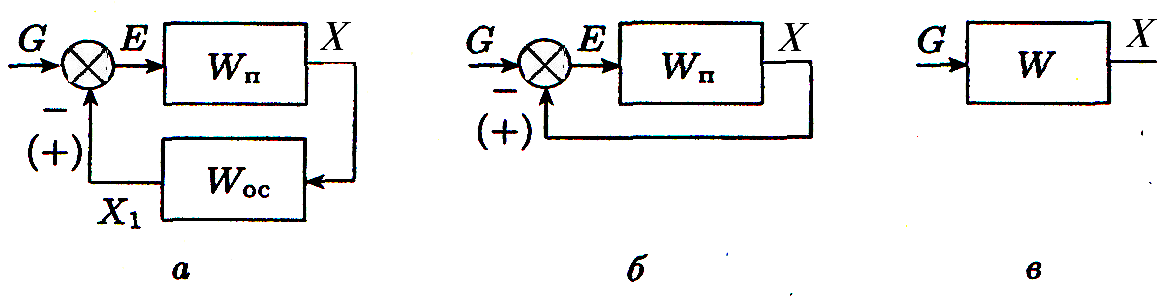
Обратное соединение, или звено, охваченное обратной связью. Так называется соединение двух звеньев, при котором выход звена прямой цепи подается на вход звена обратной связи, выход которого складывается с входом первого звена (рис.4 а). Если сигнал обратной связи (выход звена обратной связи) вычитается (т.е. складывается с отрицательным знаком), то обратная связь называется отрицательной, в противном случае — положительной. Когда передаточная функция звена обратной связи равна единице (Woc(s) = 1), обратное соединение изображается так, как показано на рис.4 б.
а б в
Рис.4.
При размыкании обратной связи перед сумматором получаем последовательное соединение, передаточная функция которого равна Wp(s) = WП(s)W0C(s). Эта передаточная функция называется передаточной функцией разомкнутой цепи.
Передаточную функцию WK(s) = Wn(s)Woc(s)W  (s), в которой учитывается передаточная функция сумматора по входу обратной связи, будем называть передаточной функцией контура. Здесь W
(s), в которой учитывается передаточная функция сумматора по входу обратной связи, будем называть передаточной функцией контура. Здесь W  ,(s) — передаточная функция сумматора по входу обратной связи, и она равна —1 (минус единице) при отрицательной обратной связи (перед соответствующим входом стоит знак минус) и 1 (плюс единице) при положительной обратной связи.
,(s) — передаточная функция сумматора по входу обратной связи, и она равна —1 (минус единице) при отрицательной обратной связи (перед соответствующим входом стоит знак минус) и 1 (плюс единице) при положительной обратной связи.
Передаточная функция при обратном соединении равна 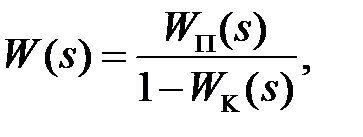 и при преобразовании обратное соединение заменяется
и при преобразовании обратное соединение заменяется
одним звеном с указанной передаточной функцией (рис.4в).
Передаточные функции при последовательном, параллельном и обратном соединениях выводятся следующим образом: выписываются уравнения всех звеньев, входящих в соединение, и исключаются все промежуточные переменные.
Для примера получим передаточную функцию обратного соединения. Обратное соединение (см. рис.4 а) описывается следующими уравнениями:
E = G + W X1, X = WП E, X1 = W0CX.
Исключим переменные Е и Х1. Для этого выражение для Х1 из последнего уравнения подставим в первое уравнение и полученное выражение для Е подставим во второе уравнение. Тогда получим
X = WПG + WПW W0CX,
(1 – WПW W0C)X = WПG.
Отсюда передаточная функция обратного соединения есть  что и требовалось получить.
что и требовалось получить.
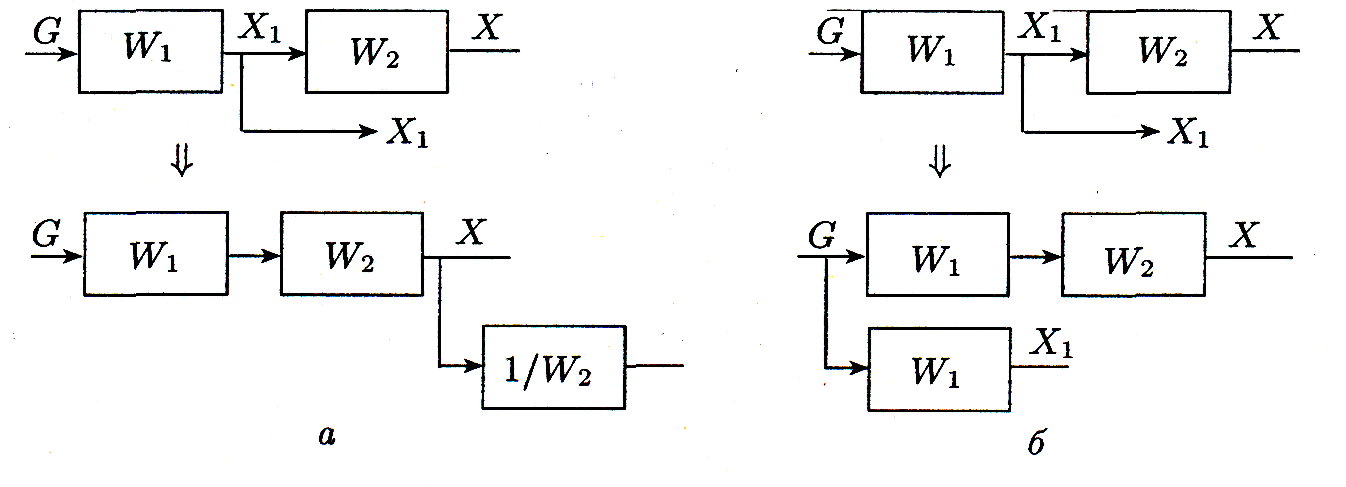
Перенос сумматора. При переносе сумматора по ходу сигнала добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится звено (рис.5а). При переносе сумматора против хода сигнала добавляется звено с передаточной функцией, равной обратной передаточной функции звена, через которое переносится сумматор (рис.5 б).
При переносе сумматора участок цепи, через который переносится сумматор, становится неэквивалентным. Поэтому при преобразовании структурных схем нельзя переносить сумматор через точку съема сигнала.
а б
Рис.5.
Перенос узла. При переносе узла по ходу сигнала добавляется звено с передаточной функцией, равной обратной передаточной функции звена, через которое переносится узел (рис.6 а). При переносе узла против хода сигнала добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится_узел (рис.6 б).
а б
Рис.6.
Вычисление передаточной функции одноконтурной системы. Замкнутая система называется одноконтурной, если при ее размыкании в какой-либо точке замкнутого контура получается цепь (схема) без параллельных и обратных соединений (рис.7).
Цепь по ходу сигнала от точки приложения входной переменной до точки съема выходной переменной называется прямой цепью.
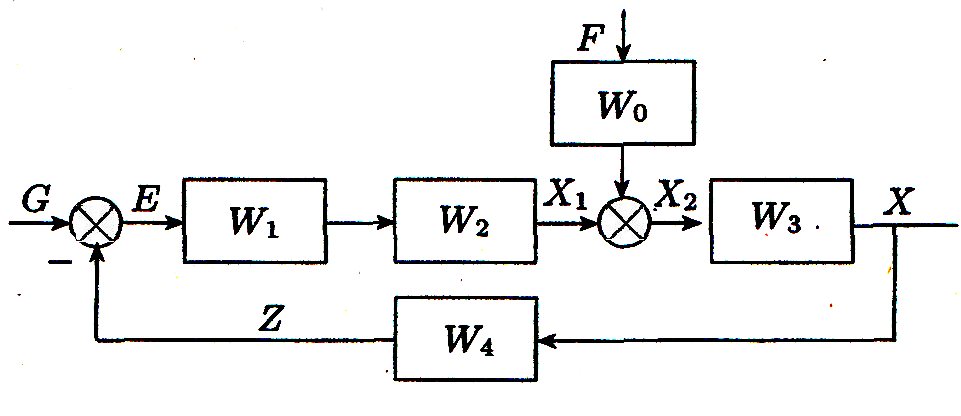
Рис.7.
Прямая цепь представляет последовательное соединение звеньев. Поэтому передаточная функция прямой цепи WП равна произведению передаточных функций звеньев, входящих в эту цепь, включая и сумматоры.
Передаточная функция контура WK равна произведению передаточных функций всех звеньев, входящих в замкнутый контур, включая сумматоры. Напомним: передаточная функция сумматора по входу со знаком плюс равна плюс единице, а по входу со знаком минус — минус единице.
Прямая цепь системы (см. рис.7) относительно входа G и выхода X представляет последовательное соединение двух сумматоров и звеньев с передаточными функциями W1, W2 и W3. Входы сумматоров в этой цепи имеют знак плюс. Поэтому передаточные функции сумматоров равны единице и соответственно передаточная функция прямой цепи WП=W1W2W3 .
Прямая цепь рассматриваемой системы относительно входа f и выхода е представляет последовательное соединение двух сумматоров извеньев с передаточными функциями Wo, W3 и W4. Вход первого сумматора имеет знак плюс, и его передаточная функция равна 1; вход второго сумматора имеет знак минус, и его передаточная функция равна —1. Поэтому в этом случае передаточная функция прямой цепи WП = W1W2W3 .
Правило вычисления передаточной функции замкнутой одноконтурной системы. Передаточная функция одноконтурной системы относительно внешнего воздействия (входа) G и выхода X равна передаточной функции прямой цепи, деленной на единицу минус передаточная функция контура:
W xg = 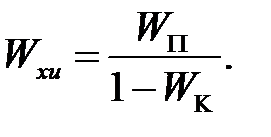
Согласно этой формуле передаточная функция рассматриваемой системы (см. рис.7.) относительно входа G и выхода X равна
Wxg = 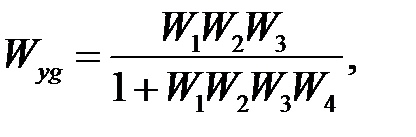
относительно входа f и выхода е равна
Покажем справедливость полученной формулы на примере вывода передаточной функции Wef. Так как вычисляется передаточная функция относительно внешнего воздействия F, полагаем G = 0. При этом уравнения системы можно записать в виде
E = -Z, X1=W1W2E, X2 = X1+W0F, Z = W3W4X2.
Для получения искомой передаточной функции нужно из этой системы уравнений исключить все переменные, кроме Е и F. Подставив выражение для X1 из второго уравнения в третье, а найденное выражение для Х2 в четвертое, получим
Z = W3W4(W1W2E + W0F) = W3W4W1W2E + W3W4W0 F.
Подставим это выражение в первое уравнение приведенной системы уравнений:
Е = -W3W4W1 W2E - W3W4W0F.
Отсюда для искомой передаточной функции находим
Очевидно, эта передаточная функция совпадает с передаточной функцией, полученной выше.
Вычисление передаточной функции многоконтурной системы. Замкнутая система называется многоконтурной, если при ее размыкании в какой-либо точке замкнутого контура получается цепь, содержащая параллельное или обратное или то и другое соединение.
Многоконтурная система не имеет перекрестных связей, если любые два контура, образованные параллельными или обратными соединениями, не имеют общих участков (рис.8 а) или если какие-либо два контура имеют общий участок, то один из них вложен внутрь другого (рис.8 б).
Многоконтурная система имеет перекрестные связи, если она содержит два контура, которые имеют общий участок, и при этом ни один из них не вложен внутрь другого (рис.8 в).
Порядок вычисления передаточной функции многоконтурной системы следующий:
1) путем переноса узлов и сумматоров освободиться от перекрестных связей;
a
б
в
Рис.8.
2) используя правила преобразования параллельных и обратных соединений, преобразовать многоконтурную систему в одноконтурную;
3) по правилу вычисления передаточной функции одноконтурной системы определить искомую передаточную функцию.
При преобразовании структурной схемы нужно позаботится о том, чтобы не исчезли точки съема переменных, относительно которых ищутся передаточные функции, или чтобы эти точки не оказались на неэквивалентном участке (т.е. не следует переносить сумматор через эти точки).
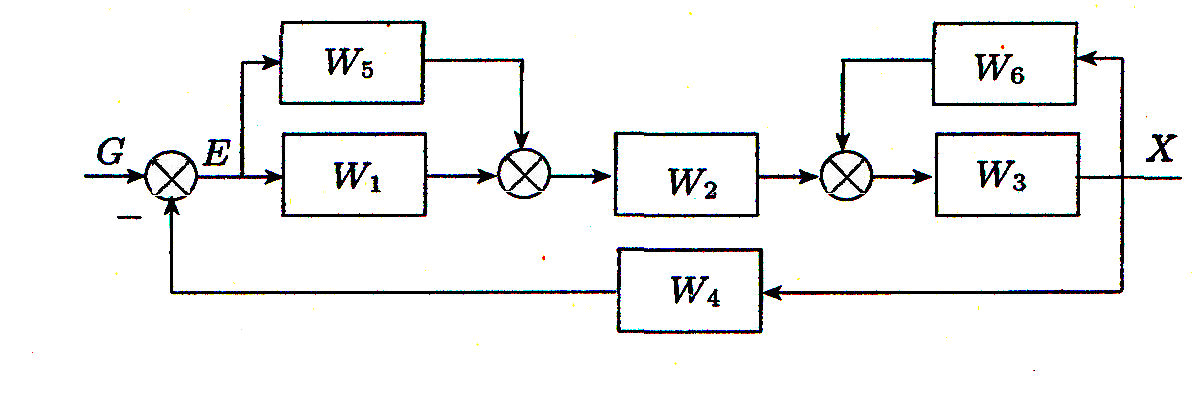
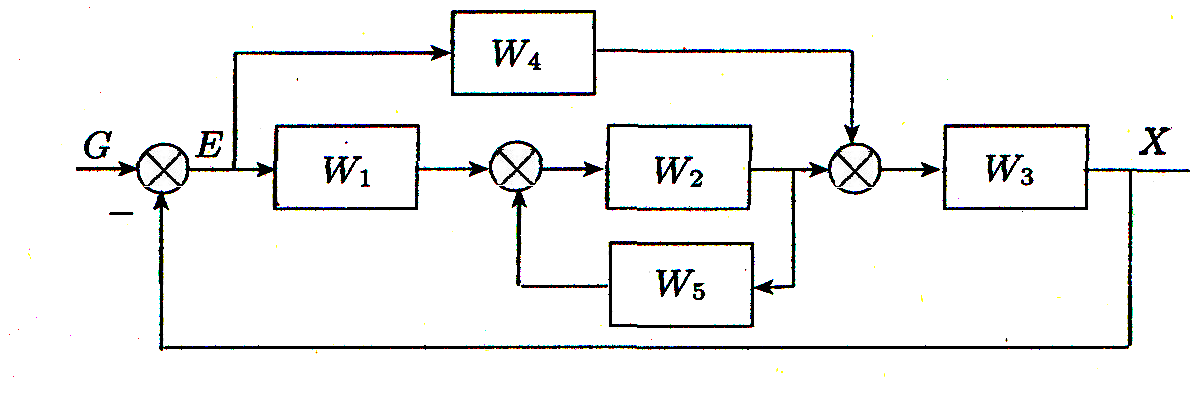
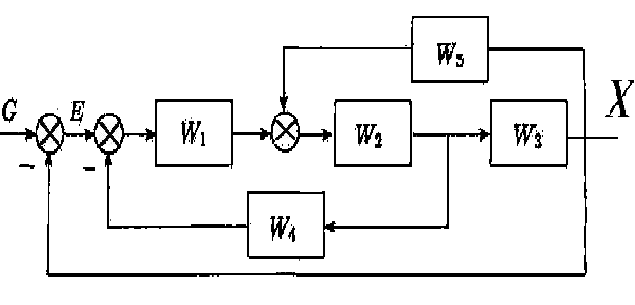
Пример 1. Определить передаточные функции Wyg и Wyf системы управления, представленной на рис.9 а.
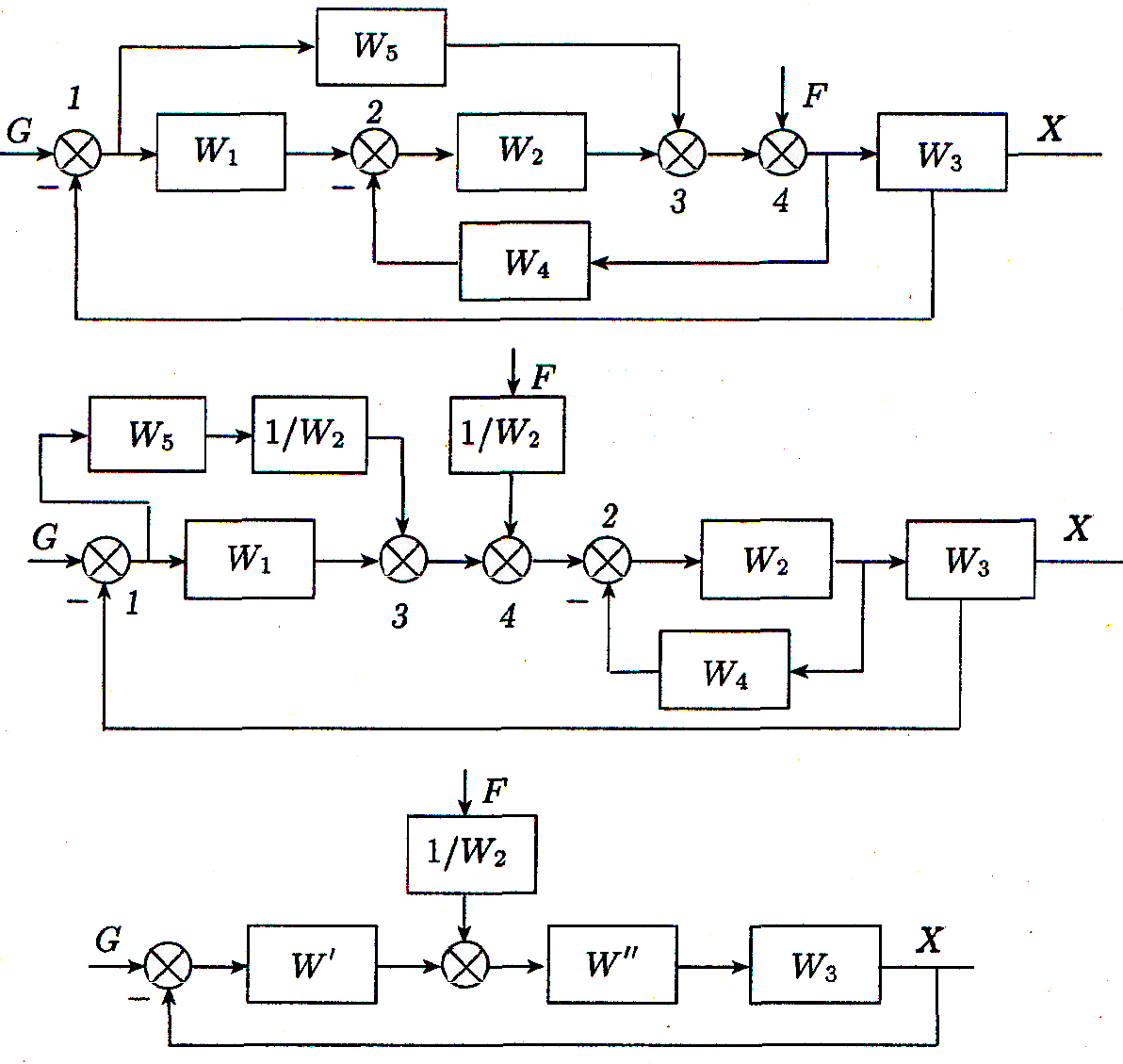
Решение. Сначала освободимся от перекрестных связей. Для этого перенесем сумматор 3 против хода сигнала через звено с передаточной функцией W2 и сумматор 2. То же самое проделаем с сумматором 4 (рис.9 б).
Далее, заменив параллельное соединение звеном с передаточной функцией, получим одноконтурную систему (рис.9 в).
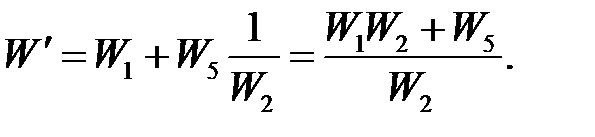 ,
, 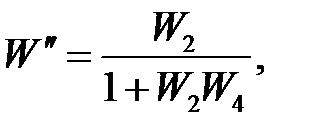 .
.
Из последней схемы по правилу вычисления передаточной функции одноконтурной системы находим
а
б
в
Рис.9.

При вычислении передаточных функций многоконтурных систем с перекрестными связями во многих случаях целесообразно, а иногда и необходимо, если возможно, предварительно упростить схему, используя правила преобразования параллельных и обратных соединений, затем следовать приведенному выше порядку вычисления передаточных функций многоконтурных систем.

