 2015-06-10
2015-06-10 712
712Зміст
1. Вступ……………………………………………………………………...2
 |
2. Часові діаграми та пояснення роботи схеми..………………………3
3. Розрахунок силової частини…………………………………….……..6
4. Розрахунок системи керування ………………………………………8
5. Розрахунок перехідного процесу………………………………….…..9
6. Розрахунок стійкості…………………………………………………..17
7. Висновки………………………………………………………………..22
8. Література ……………………………………………………………..23
Додаток 1. Схема електрична принципова
Додаток 2. Перелік елементів
Додаток 3. Текст програми моделювання перехідного процесу
 Вступ
Вступ
Виконання завдання даної курсової передбачає розрахунок силової частини підвищуючого імпульсного стабілізатора напруги по наперед заданій схемі та параметрам приладу. До того ж необхідно спроектувати систему керування силової частини приладу та розрахувати її вихідні каскади. При цьому необхідно вибрати її параметри такими, щоб виконувались умови стійкості. Для цього треба розрахувати перехідний процес та перевірити стійкість системи.
 Часові діаграми та пояснення роботи схеми
Часові діаграми та пояснення роботи схеми
Рис.1
Процеси, що відбуваються в схемі імпульсного стабілізатора будемо розглядати в квазіусталеному режимі.
 Генератор, зібраний на інверторах DD1.1, DD1.2 та RC-ланцюжку генерує задавальний сигнал з частотою перетворення f п=20 кГц. Цей задавальний сигнал подається на вхід тригера DD2.1 на виході якого формується стробуючий сигнал з скважністю Q1 і такою ж частотою. Далі цей сигнал подається на вхід системи формування ШІМ. Ця система складається:
Генератор, зібраний на інверторах DD1.1, DD1.2 та RC-ланцюжку генерує задавальний сигнал з частотою перетворення f п=20 кГц. Цей задавальний сигнал подається на вхід тригера DD2.1 на виході якого формується стробуючий сигнал з скважністю Q1 і такою ж частотою. Далі цей сигнал подається на вхід системи формування ШІМ. Ця система складається:
§ Операційний підсилювач (ОУ) DA4.1 на прямий вхід якого подається напруга пропорційна напрузі на навантаженні, а на інверсний – еталонна напруга. Він виконує роль підсилювача помилки.
§ Генератор пилкоподібної напруги (ГПН),який складається з:
a) з конденсатора С6, що виконує роль накопичувального елементу;
b) транзистора VT2, який відкривається в моменти тактових імпульсів і заряджає конденсатор до напруги сигналу помилки;
c) транзистора VT3, який виконує роль генератора стабільного струму;
§ Компаратор, зібраний на операційному підсилювачі DA4.2.
Опишемо роботи цієї системи. Коли стробуючий сигнал з виходу тригера DD2.1 має потенціал високого рівня, то відкривається транзистор VT2 і ємність С6 ГПН, швидко заряджається до напруги, рівній напрузі на виході ОУ DA4.1. Швидкість заряду визначається сумою вихідного опору ОУ DA4.1 та відкритого транзистора VT2:  . Для того, щоб ємність зарядилась необхідно, щоб
. Для того, щоб ємність зарядилась необхідно, щоб  , де
, де  – тривалість імпульсу додатної полярності стробуючого сигналу. Коли величина напруги стробуючого сигналу стає нульовою транзистор VT2 закривається і заряд ємності завершується. В той же час відкривається транзистор VT3, що під’єднує до конденсатора С6 генератор постійного струму. Це призводить до перезаряду ємності постійним струмом. Його величина визначається ВАХ транзистора VT3 та його напругою зміщення, що створюється резисторами R10-R12 та діодом VD3. При цьому напруга на конденсаторі С6 зменшується по лінійному закону. Ця напруга подається на неінвертуючий вхід компаратора DA4.2 при цьому його інвертуючий вхід заземлений. Тому на виході компаратора буде формуватись ШІМ – сигнал з частотою f п=20 кГц і коефіцієнтом заповнення імпульсів
– тривалість імпульсу додатної полярності стробуючого сигналу. Коли величина напруги стробуючого сигналу стає нульовою транзистор VT2 закривається і заряд ємності завершується. В той же час відкривається транзистор VT3, що під’єднує до конденсатора С6 генератор постійного струму. Це призводить до перезаряду ємності постійним струмом. Його величина визначається ВАХ транзистора VT3 та його напругою зміщення, що створюється резисторами R10-R12 та діодом VD3. При цьому напруга на конденсаторі С6 зменшується по лінійному закону. Ця напруга подається на неінвертуючий вхід компаратора DA4.2 при цьому його інвертуючий вхід заземлений. Тому на виході компаратора буде формуватись ШІМ – сигнал з частотою f п=20 кГц і коефіцієнтом заповнення імпульсів  . Далі цей сигнал подається на вхід драйвера DA1, де формується амплітуда і потужність сигналу необхідна для включення/виключення силового транзистора VT1.
. Далі цей сигнал подається на вхід драйвера DA1, де формується амплітуда і потужність сигналу необхідна для включення/виключення силового транзистора VT1.
Опишемо роботу силової частини схеми. Як було сказано процеси, що відбуваються в схемі імпульсного стабілізатора будемо розглядати в квазіусталеному режимі. Тому в початковий момент часу струм у дроселі має певне початкове значення i к. При відмиканні силового транзистора VT1 до дроселя L1 прикладається напруга рівна джерелу живлення (якщо не враховувати падіння напруги на транзисторі) і струм в дроселі починає лінійно зростати. При цьому навантаження в цей період часу відключене від джерела живлення бо діод VD1 закритий, так як напруга на його аноді майже рівна нулю, а потенціал катода рівний напрузі на навантаженні. Тому напруга на навантаженні підтримується тільки за допомогою енергії, що запаслася в  конденсаторі С5 за попередній період tp розряду струму дроселя на навантаження. Після завершення заряду дроселя, в момент часу tз струм в ньому має значення i п. В цей момент часу силовий транзистор VT1 закривається, а діод VD1 відкривається, бо напруга на його аноді стає більшою чим на катоді. В цей період часу енергія дроселя частково заряджає конденсатор С5 і частково передається в навантаження. Далі процеси заряду та розряду струму дроселя періодично повторюються.
конденсаторі С5 за попередній період tp розряду струму дроселя на навантаження. Після завершення заряду дроселя, в момент часу tз струм в ньому має значення i п. В цей момент часу силовий транзистор VT1 закривається, а діод VD1 відкривається, бо напруга на його аноді стає більшою чим на катоді. В цей період часу енергія дроселя частково заряджає конденсатор С5 і частково передається в навантаження. Далі процеси заряду та розряду струму дроселя періодично повторюються.
Розрахунок силової частини
 Визначимо мінімальний γmin та максимальний γmax коефіцієнт заповнення імпульсів силового ключа з регулювальної характеристики підвищуючого ІСН:
Визначимо мінімальний γmin та максимальний γmax коефіцієнт заповнення імпульсів силового ключа з регулювальної характеристики підвищуючого ІСН:

При цьому будемо вважати, що елементи схеми ідеальні.
Звідки γmax:

γmin:

γном:

Так як γmax<0.9, то даний перетворювач буде дієздатним, бо при γmax>0.9 із-за не ідеальності елементів в схемі реальна регулювальна характеристика має спадний характер.
Визначимо максимальну величину індуктивності дроселя Lmax при якому ще буде передаватись задана величина потужності Pmax в навантаження.

Оберемо значення індуктивності L1 <Lmax=56 мкГн. Так дуже велике зменшення величини індуктивності приведе до зростання струмів через ключовий елемент. При цьому підходить дросель B82111-E-C24 56 мкГн, 1.5А. Так як максимальний середній струм через дросель рівний:  . Тому використаємо 4 таких дроселі. З’єднавши їх по два паралельно і включивши ці два з’єднання послідовно.
. Тому використаємо 4 таких дроселі. З’єднавши їх по два паралельно і включивши ці два з’єднання послідовно.
Розрахуємо ємність конденсатора згладжуючого фільтра С з формули, що визначає коефіцієнт пульсацій KП:
 .
.
Звідки:

Напруга на конденсаторі:  . (K50-17 400 мкФ)
. (K50-17 400 мкФ)
Розрахуємо параметри нульового діода VD1. Максимальна зворотна напруга на ньому рівна максимальній величині напруги на навантаженні:

 Середній струм:
Середній струм:

(Діод Шотткі IR 10BQ040 – 40В, 1А)
Параметри силового ключа.
Максимальна напруга:

Максимальний струм розраховується згідно з величини індуктивності L:

(Транзистор IRF460 50В 10А).
 Розрахунок системи керування
Розрахунок системи керування
Нехай джерело опорної напруги має значення 3 В. Тоді при номінальному значенні вихідної напруги з датчика напруги на резисторах R4-R5 повинно зніматися таке ж значення напруги. Розрахуємо значення цих резисторів. Нехай опір резистора R5=10 кОм. Тоді опір резистора R5 знаходиться з формули  . Тоді
. Тоді  . При цьому коефіцієнт передачі напруги датчика рівний
. При цьому коефіцієнт передачі напруги датчика рівний  .
.
Коефіцієнт підсилення підсилювача сигналу похибки на операційному підсилювачі DA4.1 візьмемо KU=20. Коефіцієнт підсилення задається резисторами R7 та R9 і має таку залежність  . Взявши значення резистора R7=200 Ом, визначимо R9=4 кОм.
. Взявши значення резистора R7=200 Ом, визначимо R9=4 кОм.
За таких параметрів визначимо при якому значенні напруги на навантаженні система керування почне відпрацьовувати помилку:  .
.
Розрахуємо спад напруги в часі пилкоподібного генератора напруги. При номінальному значенні вихідної напруги UH = 24В, γном=0.625. Враховуючи, що частота перетворення рівна 20 кГц, то тривалість пили при цьому буде рівна:  . Амплітуда пили буде рівна вихідному значенню напруги підсилювача помилки. Так як помилка рівна нулю, то амплітуда пили рівна 2.5 В. З цих даних знаходимо нахил пили:
. Амплітуда пили буде рівна вихідному значенню напруги підсилювача помилки. Так як помилка рівна нулю, то амплітуда пили рівна 2.5 В. З цих даних знаходимо нахил пили:  .
.
Звідки знаходимо залежність коефіцієнта заповнення імпульсів від напруги на навантаженні:
 .
.
В якості вихідного каскаду системи керування виступає драйвер IR2127, на вхід якого подається ШІМ-сигнал ТТЛ рівня, а цей драйвер підсилює цей сигнал до необхідної амплітуди та потужності.
Так як величина вхідної напруги 9В, то для живлення драйвера використовується DC-DC конвертор із 5В до 12В TMA 0515S фірми TRACO POWER.
 Розрахунок перехідного процесу
Розрахунок перехідного процесу
Складемо схеми заміщення ІСН при замкнутому і розімкненому силовому ключі VT1. При цьому силовий ключ в розімкненому стані буде мати нескінченно великий опір, а в замкненому – паспортне значення. Схема заміщення силового діода у відкритому стані – джерело постійної напруги (напруга зміщення) та диференційний опір, а в закритому – нескінченно великий опір. Дросель замінюється індуктивністю та активним опором, а конденсатор вважатимемо ідеальною ємністю.
Задамо числові значення елементів схеми заміщення:
Силовий ключ: опір у відкритому стані  .
.
Силовий діод: величина напруги зміщення  , диференційний опір
, диференційний опір  .
.
Дросель: індуктивність L=56 мкГн, активний опір RL=0.3 Ом.
Конденсатор: ємність 400 мкФ.
Будемо вважати, що в режимі з розімкненим зворотнім зв’язком коефіцієнт заповнення імпульсів γ=0.7.
Еквівалентна схема заміщення ІСН при замкненому силовому ключі VT1 зображена на рис.2.
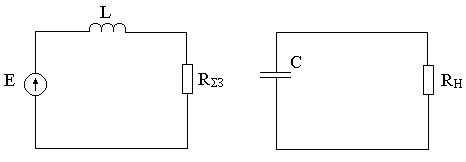
Рис.2
Опір  Ом.
Ом.
Рівняння для розрахунку перехідного процесу:
 ,
,  .
.
 ,
,  .
.

Еквівалентна схема заміщення ІСН при розімкненому силовому ключі VT1 зображена на рис.3.
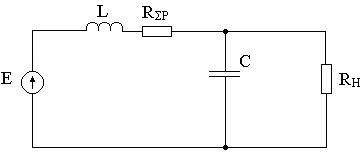
Рис.3
Опір  Ом.
Ом.
Перехідний процес в цій схемі заміщення будемо шукати за допомогою функцій вільного режиму (ФВР). Ці функції будемо шукати чисельним методом. Складемо систему рівнянь за правилами Кірхгофа для схеми рис.3.
Замінимо  ,
,  . Тоді будемо мати:
. Тоді будемо мати:
Розв’яжемо цю систему відносно змінних  ,
,  виключивши змінну
виключивши змінну  , бо вона не є змінною стану. Тоді матимемо систему:
, бо вона не є змінною стану. Тоді матимемо систему:
Рекурентні формули для знаходження перехідного процесу чисельним методом.
За допомогою них шукаються ФВР. При цьому для знаходження ФВР  в рекурентних формулах приймається і 0=1, u 0=0, а для знаходження ФВР
в рекурентних формулах приймається і 0=1, u 0=0, а для знаходження ФВР  – і 0=0, u 0=1 (початкові умови). Для визначення ФВР треба
– і 0=0, u 0=1 (початкові умови). Для визначення ФВР треба  циклічно обчислювати формули з певним кроком
циклічно обчислювати формули з певним кроком  . При цьому
. При цьому  ,
,  при початкових умовах і 0=1, u 0=0,
при початкових умовах і 0=1, u 0=0,  ,
,  при початкових умовах і 0=1, u 0=0. Знак мінус в ФВР
при початкових умовах і 0=1, u 0=0. Знак мінус в ФВР  з’являється тому, що при одиничних умовах в ємності С, струм в індуктивності i L має протилежний напрям ніж у ФВР.
з’являється тому, що при одиничних умовах в ємності С, струм в індуктивності i L має протилежний напрям ніж у ФВР.
Після цього складається формули для розрахунку перехідного процесу. При замкненому ключі S вони має вигляд:


Вимушені складові шукаються за формулами:


Цей алгоритм розрахунку був використаний для написання програми розрахунку перехідного процесу на мові програмування Visual C++ 6.0. При цьому були отриманий графік перехідного процесу.
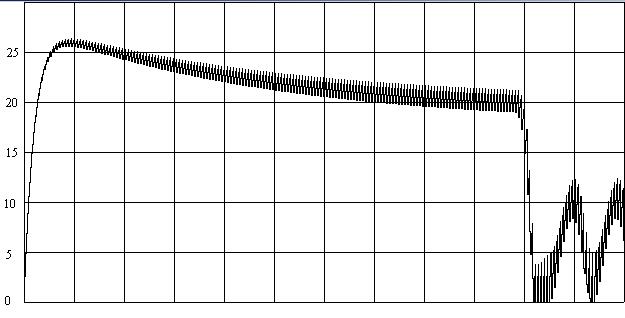
Рис.4. Струм при перехідному процесі (KU=48)
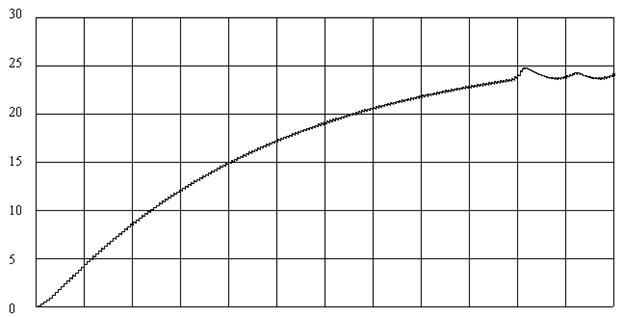
Рис.5. Напруга при перехідному процесі (KU=48)

Рис.6. Струм при перехідному процесі (KU=24)
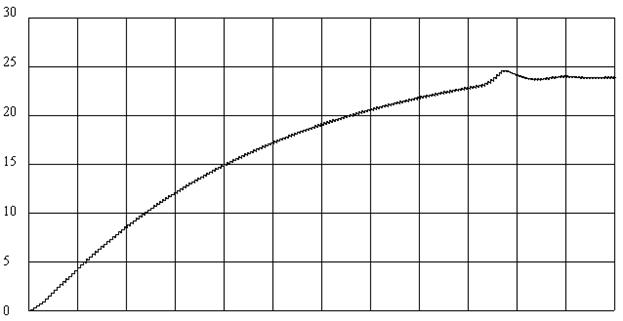
Рис.7. Напруга при перехідному процесі (KU=24)
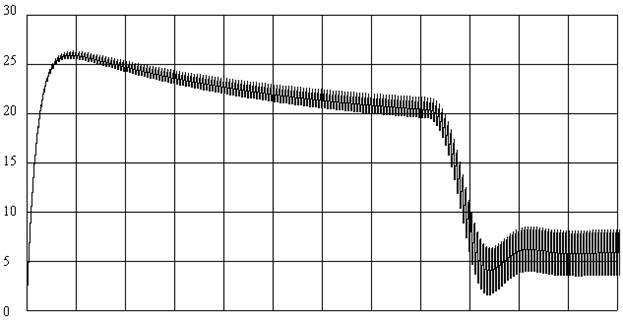
Рис.8. Струм при перехідному процесі (KU=12)
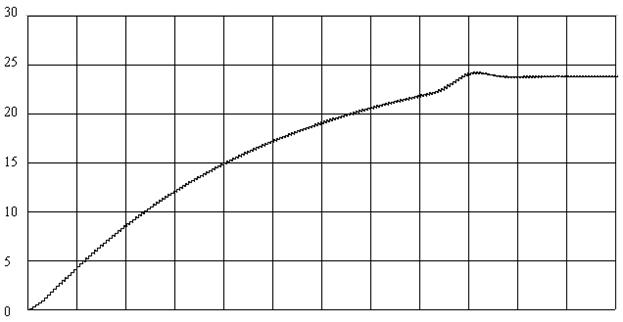
Рис.9. Напруга при перехідному процесі (KU=12)
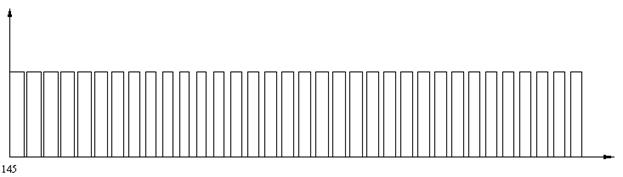
Рис.10. Зміна коефіцієнта заповнення імпульсів γ при ввімкненні СУ
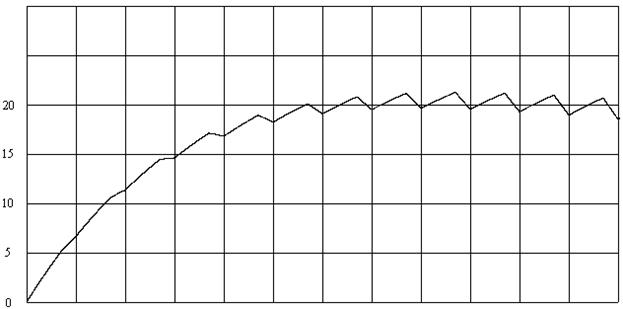
Рис.11. Струм при перехідному процесі (збільшено)
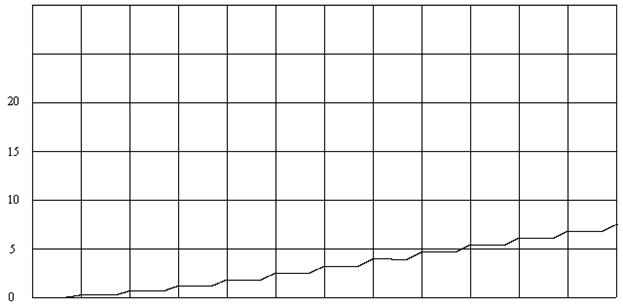
 Рис.12. Напруга при перехідному процесі (збільшено)
Рис.12. Напруга при перехідному процесі (збільшено)
З діаграм видно, що при KU=48 система не стійка, так як в ній виникають автоколивання. При KU=24 система стійка, але процес встановлення усталеного значення струму та напруги затягнутий. При KU=12 усталене значення струму та напруги відбувається майже одразу після включення СУ. Усталене значення напруги рівне UH = 23.9 B, при цьому γ=0.71. Ці значення майже збігаються з розрахованими.
Струм індуктивності при перехідному процесі набагато більший ніж в усталеному режимі. Це пов’язано з тим, що спочатку ємність перетворювача розряджена і до дроселя прикладається напруга, що майже рівна величині джерела живлення. Якщо не вживати ніяких заходів, то необхідно дросель діод та ключ схеми необхідно обирати з запасом по струму.
 Розрахунок стійкості
Розрахунок стійкості
Будемо вважати, що струм в дроселі протікає весь час (режим непевного струму). Тоді схема має два інтервали на яких схеми мають постійну структуру.
На інтервалі nT<t<T(n+γ) еквівалентна схема має вигляд згідно рис.15.
Рис.15
Складемо диференційні рівняння, що описують перехідний процес:
На інтервалі, коли транзистор закритий T(n+γ) <t< (n+1)T еквівалентна схема має вигляд згідно рис.16.
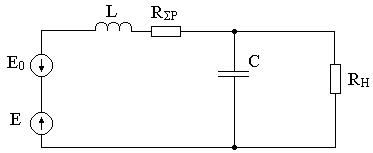
Рис.16
Складемо диференційні рівняння, що описують перехідний процес:
Об’єднавши ці рівняння отримаємо систему:
де k=0 на першому інтервалі (nT<t<T(n+γ)) і k=1 на – другому (T(n+γ) <t< (n+1)T).
Виразивши систему через змінні стану отримаємо:
Або в матричному вигляді:
 або
або 
Звідки  ,
,  .
.
 ,
,  .
.
Ліанеризуємо отриману систему в околі усталеного режиму. Для цього знайдемо диференціали по початковим значенням змінних стану:
де 
Враховуючи що:
 і властивість
і властивість  - функції
- функції

 так як в момент часу
так як в момент часу  відбувається запирання транзистора
відбувається запирання транзистора  то
то
Вираз для диференціювання:

С урахуванням того, що
 перетворимо до вигляду
перетворимо до вигляду

Записуємо диференційне рівняння в прирощеннях:

Різницеве рівняння будемо шукати в вигляді  .
.
Вирішуємо це рівняння на інтервалі постійності структури, використовуючи перетворення Лапласа:
На інтервалі  рівняння буде мати вигляд:
рівняння буде мати вигляд:

де:  при t=nT и
при t=nT и 

Для переходу в часову область використаємо обернене перетворення Лапласа:

в кінці інтервалу при 

 Знайдемо матрицю
Знайдемо матрицю 
Розв’яжемо значення в приростах на другому інтервалі:

 при
при  і
і


Застосуємо перетворення Лапласа:
 розв’язавши, отримаємо
розв’язавши, отримаємо
Застосовуємо обернене перетворення Лапласа:
в кінці інтервалу, при 

Знайдемо матрицю 
 Підставляємо значення кінця першого інтервалу:
Підставляємо значення кінця першого інтервалу:

введемо позначення 
з урахуванням цього 
Застосовуємо дискретне перетворення Лапласа:

В результаті розрахунків знаходимо багаточлен:
По значенням коренів характеристичного рівняння можна заробити висновок про стійкість системи.
Отримаємо корені:
Так як дійсні частини коренів знаходяться в колі одиничного радіуса, то система стійка.
 Висновки
Висновки
При виконанні цієї курсової роботи було спроектовано підвищуючий стабілізатор напруги з стабілізацією вихідної напруги. Для визначення параметрів системи управління, що забезпечує роботу стабілізатора, що вказані в завданні, була складена його модель та розраховано перехідний процес. При цьому було з’ясовано, що пусковий струм в стабілізаторі був на порядок більший квазіусталеного. Тому елементи схеми треба було обирати з великим запасом по струму. Для усунення цього явища було застосовано систему плавного пуску. Після цього, під час перехідного процесу, струм в стабілізаторі не перевищував квазіусталений. На основі перехідного процесу було розраховано стійкість системи в малому. Система стійка, отже прилад зможе виконувати свої функції.
 Література
Література
1. Стжелецки Р., Коротеев И.Е., Жуйков В.Я. Хаотические процессы в системе силовой электроники. – К.: Аверс, 2001. – 197 с.
2. Ромашко В.Я. Основи аналізу дискретно-лінійних ланцюгів. Навчальний посібник. – К.: Либідь, 1993. – 120 с.
3. Б.Ю. Семенов. Силовая электроника для любителей и профессионалов. – М: СОЛОН-Р, 2001. – 327 с.
 |








