 2015-06-28
2015-06-28 1057
1057Для синтеза АСР с заданными показателями качества работы необходимо построить переходные процессы для найденных параметров настройки регулятора и принять в качестве оптимальных те, при которых выполняются требования к качеству функционирования ЦАСР. Объект по каналу регулирования имеет передаточную функцию:  . По каналу возмущения передаточная функция объекта имеет вид:
. По каналу возмущения передаточная функция объекта имеет вид:  .
.
Построим графики переходных процессов, которые будут происходить в системе, при различных возмущающих воздействиях: при изменении задания регулятора температуры на 0,5кг/см2, при изменении хода регулирующего органа на 20%. При построении графиков используем найденные настройки регулятора при различных значениях такта квантования.
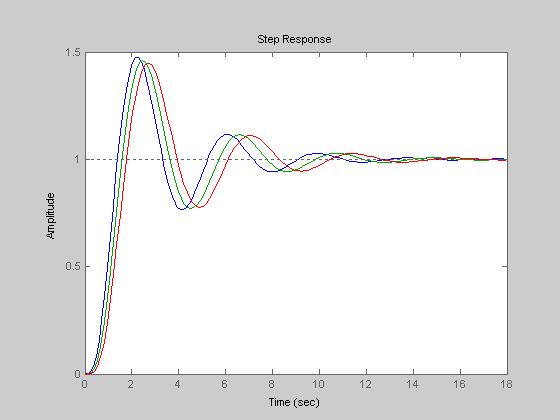
Рис.4.1Переходный процесс при времени квантования Tkw=0,0143, разных К3 и изменении задания регулятору
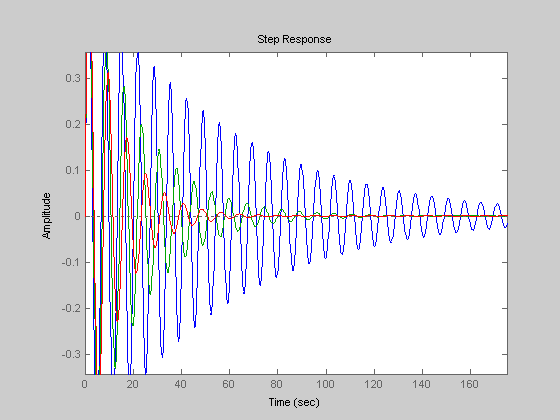
Рис.4.2Переходный процесс при времени такта квантования Tkw=0,0143, разных К3 и изменении воздействия по каналу возмущения на 20%
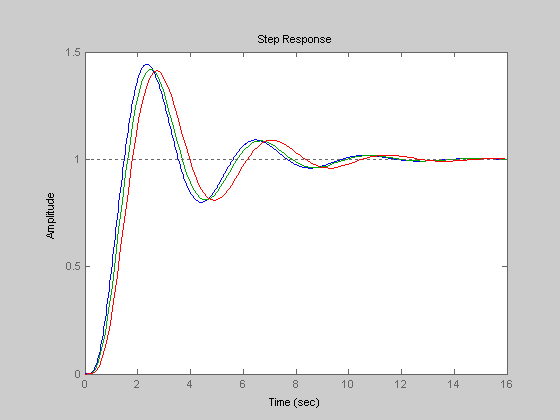
Рис.4.3 Переходный процесс при времени квантования Tkw=0,0827, разных К3 и изменении задания регулятора
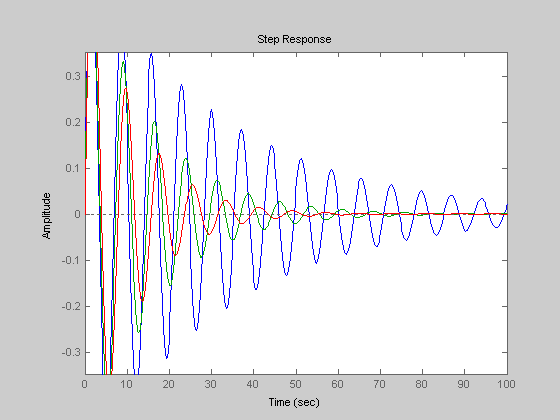
Рис.4.4Переходный процесс при времени такта квантования Tkw=0,0827, разных К3 и изменении воздействия по каналу возмущения на 20%
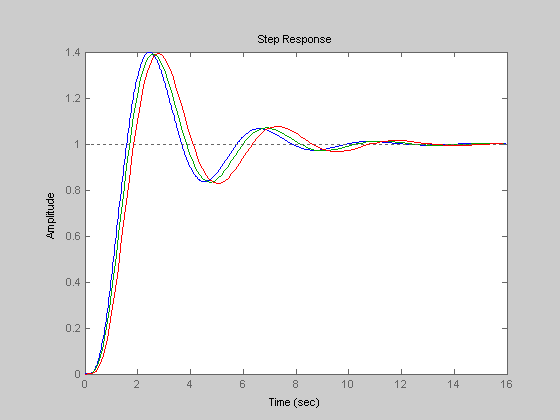
Рис.4.5 Переходный процесс при времени квантования Tkw=0,151, разных К3 и изменении задания регулятора.
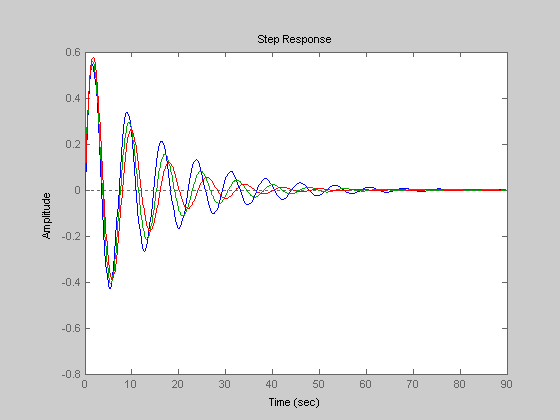
Рис.4.6 Переходный процесс при времени такта квантования Tkw=0,151, разных К3 и изменении воздействия по каналу возмущения на 20%.
Результаты анализа переходных процессов в системе регулирования температуры сведем в таблицу 2.
Таблица 2 - Сводные данные по расчёту
| Настройки регулятора | Воздействия | ||||||||
| Tkw | к1 | к2 | к3 | U = 1 | FW = 20 | ||||
| Δθmах | Y | Тр | Δθmах | Y | Тр | ||||
| 0,0143 | 0,19 | 0,0044 | 0,46 | 0,33 | 0,57 | 0,8 | |||
| 0,234 | 0,0054 | 2,116 | 0,44 | 0,31 | 12,5 | 0,545 | 0,333 | ||
| 0,288 | 0,0065 | 4,232 | 0,42 | 0,29 | 0,525 | 0,2 | |||
| 0,0827 | 0,178 | 0,0243 | 0,45 | 0,33 | 0,573 | 1,12 | |||
| 0,215 | 0,029 | 0,325 | 0,42 | 0,29 | 0,55 | 0,62 | |||
| 0,233 | 0,0346 | 0,65 | 0,41 | 0,28 | 0,535 | 0,22 | |||
| 0,151 | 0,156 | 0,043 | 0,4 | 0,296 | 14,5 | 0,545 | 1,096 | ||
| 0,184 | 0,0487 | 0,1287 | 0,4 | 0,308 | 0,56 | 0,867 | |||
| 0,205 | 0,055 | 0,257 | 0,4 | 0,321 | 0,575 | 0,691 |
Выводы
Проанализировав результаты, приведенные в таблице 2, можно сделать следующий вывод:
За оптимальные настройки регулятора принимаем те настройки, которые обеспечивают заданное качество регулирования при возможно большем значении времени такта квантования TKw т.е. при наименьших затратах на управление.
Следовательно, в качестве оптимальных выбираем следующие значения настроенных параметров: K1 = 0,19; К2 = 0,0044; К3 = 0; Tkw=0,0143 мин. При этом динамическая ошибка регулирования Δθ mах =0,46, время регулирования Трег = 12. Степень затухания переходных процессов: по каналу управления  , по каналу возмущения
, по каналу возмущения  .
.
Остаточное отклонение регулируемого параметра, т.е. величина статической ошибки Δθ ст = 0. Итак, рассчитанная АСР удовлетворяет требуемым показателям качества работы: динамическая ошибка и время регулирования не превышает заданных (допустимых) значений. Степень затухания Yпереходных процессов близка к расчетной. Статическая ошибка регулирования при использовании ПИД - регулятора равна нулю.
Список литературы
- Дудников Е.Г. Автоматическое управление в химической промышленности: Учебник для ВУЗов. – М.: Химия, 1987.
- Ф.Шински. Системы автоматического регулирования химико-технологических процессов. Пер. с англ. М., “Химия”, 1974
3. Цифровая АСР. Пример выполнения расчета в дипломных проектах и методические указания. КГТУ, 2004.
4. Федоров Ю.Н. Основы построения АСУТП взрывоопасных производств. В 2-х томах. Т.1 «Методология». – М.: СИНТЕГ, 2006. – 720с.

