 2015-06-28
2015-06-28 326
326Вычислительные устройства цифровых регуляторов реализуют следующие унифицированные законы регулирования:
- Пропорциональный (П‑закон):  (4.15)
(4.15)
- Интегральный (И‑закон):  (4.16)
(4.16)
- пропорционально‑интегральный (ПИ‑закон):
 (4.17)
(4.17)
- пропорционально‑интегральный с воздействием по производной
(ПИД‑закон):  (4.18)
(4.18)
Параметрами настройки регуляторов являются коэффициенты  и время такта (период) квантования T. Ниже приводятся соотношения, связывающие соответствующие параметры настройки дискретных и непрерывных регуляторов:
и время такта (период) квантования T. Ниже приводятся соотношения, связывающие соответствующие параметры настройки дискретных и непрерывных регуляторов:
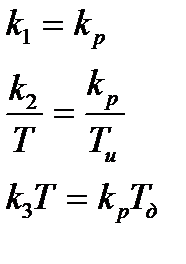
| (4.19) |
где: kр — коэффициент передачи непрерывного ПИД‑регулятора,
Ти — время изодрома,
Тд — время предварения.
Передаточные функции вычислительных устройств цифровых регуляторов, определенные в смысле дискретного преобразования Лапласа, представлены в таблице 1.
Таблица 1 - Алгоритмы цифровых регуляторов
| Регулятор | Передаточная функция Wp(р) |
| П | 
|
| И | 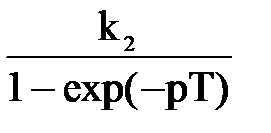
|
| ПИ | 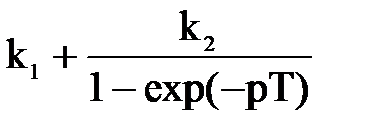
|
| ПИД |  (4.20) (4.20)
|








