 2015-07-14
2015-07-14 400
400Фазные обмотки статора, уложенные в пазы сердечника статора, представляют собой мощные электромагниты. Уменьшая число пар полюсов обмотки статора, можно увеличивать скорость двигателя, и наоборот, в соответствии с выражением
n = 60f (1 – s) / р.
Для получения несколько скоростей электродвигателя применяют два способа:
1. размещают на статоре отдельные обмотки в количестве, равном числу скоростей.
Эти обмотки имеют разное число пар полюсов и при работе двигателя включаются пооче-
редно. Например, на судах применяются двигатели серии МАП на две или три скорости (М – морской, А – асинхронный, П – полюсопереключаемый);
1. размещают на статоре обмотку, схему которой можно изменять по одному из
двух вариантов:
а) переключение обмотки со «звезды» на «двойную звезду»;
б) переключение обмотки со «треугольника» на «двойную звезду».
Этот второй способ получения нескольких скоростей широко применяется на судах иностранной постройки (особенности на судах, построенных в ФРГ).
У таких двигателей, допускающих изменение схемы обмотки, каждая фазная обмот
ка состоит из двух одинаковых частей (секционных групп) с выводами Н1-К1, Н2-К2 (Н – начало, К – конец).
Объясним принцип изменения числа пар полюсов на примере только одной фазной обмотки (рис. 9.18).
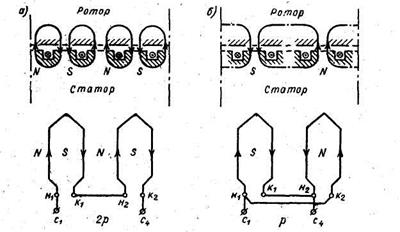
Рис. 9.18. Схема переключения секционных групп обмотки статора с последо-
вательного (а) на параллельное (б) соединение; Н и К – начала и концы секционных групп
Пусть секционные группы соединены последовательно при помощи перемычки
К1 – Н2, а на выводы Н1 и К2 подается питание (рис. 9.18, а). Задавшись произвольно вы
бранным направлением тока в сторонах секций (обозначено стрелками), перенесем эти направления в поперечные сечения проводников секций в верхней части в виде крестиков и точек.
По правилу буравчика найдем направление магнитных силовых линий вокруг каж-
дого проводника с током. Рядом расположенные силовые линии позволят определить положение электромагнитных полюсов обмотки статора. На рис. 9.18, а таких полюсов –
четыре (2р = 4), поэтому синхронная частота вращения ротора составит
n  = 60f / р = 60*50 / 2 = 1500 об / мин.
= 60f / р = 60*50 / 2 = 1500 об / мин.
При переходе от последовательного соединения к параллельному надо соединить
перемычками выводы Н1 и К2 (а не Н1 и Н2) и К1 и Н2 (а не К1 и К2) (рис. 9.18, б).
Повторяя сделанные выше рассуждения, можно найти, что при переходе от после-
довательного к параллельному соединению секционных групп число полюсов уменьши-
лось в 2 раза (2р = 2), поэтому синхронная частота вращения ротора составит
n = 60f / р = 60*50 / 1 = 3000 об / мин.
Види управління рульовими електроприводами. Вимоги SOLAS-74 і Правил Регістра до рульових приводів.








