 2015-07-14
2015-07-14 623
623Вопрос1 
Вопрос2 Когда момент, развиваемый двигателем, равен моменту сопротивления исполнительного органа, скорость привода постоянна.
Однако во многих случаях привод ускоряется или замедляется, т.е. работает в переходном режиме.
Переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток.
Причинами возникновения переходных режимов в электроприводах является изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т.е. пуск, торможение, изменение направления вращения и т.п., а также нарушение работы системы электроснабжения.
Уравнение движения электропривода должно учитывать все моменты, действующие в переходных режимах.
В общем виде уравнение движения электропривода может быть записано следующим образом [1]:
 . (2.9)
. (2.9)
При положительной скорости уравнение движения электропривода имеет вид
 . (2.10)
. (2.10)
Уравнение (2.10) показывает, что развиваемый двигателем вращающий момент  уравновешивается моментом сопротивления
уравновешивается моментом сопротивления  и динамическим моментом
и динамическим моментом  . В уравнениях (2.9) и (2.10) принято, что момент инерции привода
. В уравнениях (2.9) и (2.10) принято, что момент инерции привода  является постоянным, что справедливо для значительного числа исполнительных органов.
является постоянным, что справедливо для значительного числа исполнительных органов.
Из анализа уравнения (2.10) видно:
1) при >  ,
,  , т.е. имеет место ускорение привода;
, т.е. имеет место ускорение привода;
2) при < ,  , т.е. имеет место замедление привода (очевидно, замедление привода может быть и при отрицательном значении момента двигателя);
, т.е. имеет место замедление привода (очевидно, замедление привода может быть и при отрицательном значении момента двигателя);
3) при = ,  ; в данном случае привод работает в установившемся режиме.
; в данном случае привод работает в установившемся режиме.
Динамический момент (правая часть уравнения моментов) проявляется только во время переходных режимов, когда изменяется скорость привода. При ускорении привода этот момент направлен против движения, а при торможении он поддерживает движение.
Режимы работы электропривода, динамический момент Работа электромеханической системы электропривод – исполнительный механизм происходит при взаимодействии различных сил и моментов. Один из моментов создаётся электродвигателем, он приводит систему в движение и называется электромагнитным моментом, другие силы тормозят её (систему) и создают статический момент сопротивления – М. За положительное направление статического момента принимают направление, противоположное моменту двигателя. Электропривод работает в двух режимах: 1. установившийся или статический режим,это режим при котором скорость привода не изменяется; 2. переходный или динамический режим, это режим при котором скорость изменяется. Переходный режим может возникнуть в следующих случаях: 1. при изменении параметров двигателя, например, изменение сопротивления в цепи ротора; изменение числа пар полюсов статора и т.д.; 2. при изменении нагрузки механизма, например изменение подачи насоса, изменение величины сил трения якоря по грунту и т.д.; 3. при изменении параметров судовой сети, например, при уменьшении величины напряжения или частоты тока во время включения электродвигателей большой мощности. В переходном режиме электропривод переходит от одного установившегося режима к другому, при этом изменяются скорость, момент, и ток электродвигателя. В установившемся режиме электромагнитный момент равен статическому моменту и противоположен ему по направлению, и привод работает с постоянной скоростью. (3-1) В переходном режиме происходит ускорение или замедление привода и возникает инерционный или динамический момент, который двигатель должен преодолеть. Во время работы в переходном режиме, к электромагнитному моменту двигателя и статическому моменту добавляется динамический момент, равный, (3-2) где:суммарный момент инерции всех элементов привода, приведенный к скорости вращения вала двигателя – угловая скорость; – угловое ускорение. Появление динамического момента объясняется действием сил инерции всех частей электропривода и исполнительного механизма. Например, в электроприводе лебедки динамический момент появляется вследствие инерции якоря или ротора электродвигателя, шестерней редуктора, барабана лебёдки и т.д.. Динамический момент увеличивает время пуска и остановки электропривода, а так же время достижения установившейся скорости. Для уменьшения динамического момента в двигателях специального исполнения уменьшают диаметр ротора и одновременно увеличивают длину ротора, с целью сохранения мощности двигателя. Такие двигатели применяют в электроприводах грузоподъемных механизмов. Их применение позволяет сократить время пуска и остановки электропривода, а значит, повысить производительность грузовых лебедок и кранов. Серии таких электродвигателей называются крановыми (название произошло от грузового крана).
Вопрос3Международные и национальные морские классификационные общества Функции Регистра Украины
Все без исключения направления развития морского судоходства – проектирова-
ние и постройка судов, безопасность мореплавания, предотвращение загрязнения моря и береговой черты с судов, спасение человеческой жизни на море и др. регламентируются соответствующими Положениями, Конвенциями, Меморандумами и другими междуна-
родными морскими нормативными документами.
Контролируют выполнение этих документов международные и национальные над-
зорные организации, к основным из которых принадлежат:
1. Регистр России;
2. Английский Ллойд;
3. Американское бюро судоходства;
4. Норвежское бюро Веритас;
5. Французское бюро Веритас;
6. Японское классификационное общество;
7. Итальянский Регистр.
Объем надзорной деятельности устанавливается Правилами классификационных
обществ, например, в России и Украине - Правилами Регистра.
По состоянию на 2007 г. Украина не имеет собственных Правил Регистра и ее мор-
кие организации использует Правила Регистра России.
Познакомимся с направлениями деятельности Регистра более подробно.
Регистр является государственным органом технического надзора и классифика-
ции гражданских судов. Кроме того, Регистр по поручению и от имени правительства Украины или по поручению правительств других стран осуществляет в пределах своей компетенции технический надзор за выполнением требований международных конвенций, соглашений и договоров, в которых участвуют упомянутые страны.
Регистр устанавливает технические требования, обеспечивающие:
1. условия безопасного плавания судов в соответствии с их назначением;
2. охраны человеческой жизни и надлежащей перевозки грузов на море и на внут
ренних водных путях;
3. предотвращения загрязнения с судов,
а также
4. осуществляет технический надзор за выполнением этих требований;
5. производит классификацию судов;
6. удостоверяет валовую и чистую вместимости морских судов и обмерные харак-
теристики находящихся под надзором Регистра судов внутреннего плавания, определен-
ные в результате обмера судов.
Надзорная деятельность осуществляется на основании издаваемых Регистром Пра-
вил и имеет целью определить, отвечают ли Правилам и дополнительным требованиям суда и контейнеры, подлежащие надзору, а также материалы и изделия, предназначенные для постройки и ремонта судов и их оборудования.
Применение и выполнение Правил и дополнительных требований является обязан-
ностью проектных организаций, судовладельцев, контейнеровладельцев, судоверфей, а также предприятий, которые изготовляют материалы и изделия, подлежащие надзору Реги
стра.
Толкование требований Правил и других нормативных документов Регистра явля-
ется компетенцией только Регистра.
Надзорная деятельность Регистра не заменяет деятельности органов технического контроля судовладельцев, судоверфей и заводов-изготовителей.
Регистр осуществляет технический надзор за следующими морскими судами и подлежащими его техническому надзору судами внутреннего плавания в постройке и в эксплуатации:
.1. пассажирскими, наливными судами, предназначенными для перевозки опасных
грузов, а также буксирами, независимо от мощности главных двигателей и валовой вместимости;
.2. самоходными судами, не указанными в.1, с мощностью главных двигателей 55
кВт (75 л.с) и более;
.3. судами, не указанными в.1. и.2., валовой вместимостью 80 рег. т и более, либо
мощностью энергетического оборудования 100 кВт и более.
Регистр осуществляет технический надзор за судовыми холодильными установка-
ми с точки зрения безопасности судов, надлежащей перевозки грузов, предотвращения озоноразрушающего действия холодильных агентов на окружающую среду, а также осуществляет классификацию холодильных установок судов.
Регистр осуществляет надзор за судовыми грузоподъемными устройствами грузо-
подъемностью 1 т и более.
Регистр по особому согласованию может осуществлять также надзор за другими
судами, установками и устройствами, не перечисленными выше.
Технологические и специальные устройства судов рыболовных, кабельных, техни-
ческого флота и специального назначения не подлежат надзору Регистра, за исключением оборудования, перечисленного в соответствующих частях Правил.
Регистр осуществляет технический надзор за контейнерами при их изготовлении и эксплуатации.
Регистр рассматривает и согласовывает проекты стандартов и других нормативных
документов, связанных с его деятельностью.
Регистр может осуществлять экспертизы и участвовать в экспертизах по техниче-
ским вопросам, входящим в круг его деятельности.
Регистр издает Регистровую книгу морских судов, в которой содержатся основные технические данные судов и сведения об их классификации.
За выполненные работы Регистр взимает плату, которая назначается в соответст-
вии с тарифами.
Вопрос4 Принципи будови системи автоматичного регулювання напруги синхронних генераторів
Основной функцией АРН является стабилизация напряжения СЭЭС методом регулирования тока возбуждения.
СВАРН – система возбуждения и автоматического регулирования напряжения генераторов, обеспечивает самовозбуждение генератора и стабилизацию его напряжения. В СВАРН часть энергии переменного тока отбирается с выводов генератора, регулируется элементами АРН, преобразуется в электрическую энергию постоянного тока и подается в обмотку возбуждения генератора.
Регулируемой (управляемой) величиной в СВАРН является напряжение генератора Uг, управляющей (регулирующей) величиной – напряжение Uв или ток Iв возбуждения генератора. Основное внешнее воздействие на генератор и его выходное напряжение оказывает ток нагрузки Iг и фаза j тока нагрузки генератора.
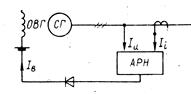
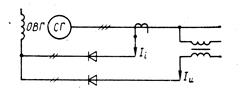
На рисунке 8.1 изображена структурная схема САРН СГ. Питание обмотки возбуждения генератора ОВГ осуществляется по двум каналам: по каналу напряжения Iu и по каналу тока нагрузки Ii.
| 
|
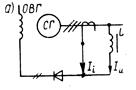
| Рисунок8. 1 – Структурная схема САРН СГ | Рисунок 8.2 – Структурная схема САРН СГ с токовым компаундированием |
В режиме холостого хода процесс возбуждения обеспечивается по каналу напряжения, а при нагрузке – еще и по каналу тока.
По принципу управления все СВАРН делятся на следующие типы:
- действующие по возмущению (амплитудно-фазового компаундирования);
- действующие по отклонению;
- комбинированные, действующие одновременно по отклонению и по возмущению.
В свою очередь системы, действующие по возмущению, делятся на системы токового компаундирования и системы фазового компаундирования.
Характерной особенностью систем токового компаундирования является арифметическое сложение выпрямленных токов, поступающих в ОВГ по каналам напряжения и тока (см. рис. 8.2). Это значит, что составляющая тока в ОВГ, поступающая по каналу тока, зависит только от нагрузки СГ и не зависит от характера (cos j) этой нагрузки.
Характерной особенностью для систем с фазовым компаундированием является геометрическое суммирование составляющих токов, поступающих на ОВГ по каналам напряжения (Iu) и тока (Iг), что обеспечивается благодаря включению компаундирующего элемента, в данной схеме фазового дросселя L в канале напряжения (см. рис. 8.3). В качестве компаундирующих элементов могут быть также применены конденсатор, магнитный шунт и т.д.
| 
|
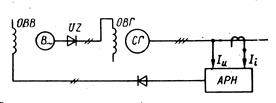
| Рисунок 8.3 – Структурная схема САРН СГ с фазовым компаундированием | Рисунок 8.4 – Структурная схема САРН бесщеточного генератора |
По способу воздействия на ОВГ все САРН делятся на две группы:
- системы прямого регулирования (см. рис. 8.1), в которой АРН непосредственно воздействует на ОВГ;
- системы косвенного регулирования, в которой АРН воздействует на ОВГ через возбудитель постоянного тока для синхронного генератора с контактными кольцами, или через возбудитель переменного тока в бесщеточном синхронном генераторе (см рис. 8.4).
Правила Регистра предъявляют следующие требования к точности стабилизации напряжения:
Агрегаты переменного тока должны иметь САРН, обеспечивающие при изменениях нагрузки от холостого хода до номинальной при номинальном коэффициенте мощности поддержание номинального напряжения в пределах ±2,5% номинального (аварийные генераторы – до ±3,5%);
Внезапное изменение симметричной нагрузки генератора, работающего при номинальной частоте вращения и номинальном напряжении, не должно вызывать снижения номинального напряжения ниже 85% и повышения выше 120%. После этого напряжение генератора должно в течение не более 1,5 с восстанавливаться (с погрешностью ±3% номинального напряжения). Для аварийных агрегатов эти значения могут быть увеличены по времени до 5 с и по напряжению до ±4% номинального значения.








