 2015-07-14
2015-07-14 4430
4430Процесс входа в синхронизм является сложным и ответственным моментом в работе синхронных микродвигателей. Ротор, достигший подсинхронной скорости, должен за счет взаимодействия полей статора и ротора (в двигателе с постоянными магнитами) или упругих свойств линий поля (в синхронном реактивном двигателе) скачком втянуться в синхронизм. Поэтому входной момент в сильной степени зависит от момента инерции ротора и момента нагрузки. Рассмотрим процесс входа в синхронизм на примере двигателя с постоянными магнитами [2].
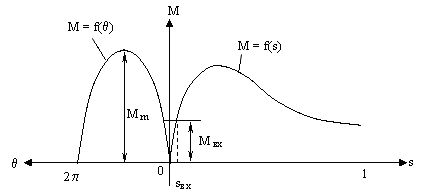
Двигатель войдет в синхронизм, если работа, совершаемая синхронным моментом, будет больше или равна сумме прироста кинетической энергии ротора и работы преодоления сопротивления нагрузки:
 | (3.4) |
Зависимость синхронного момента от угла q с учетом r1 носит сложный характер (3.2'). Примем ее синусоидальной:
Тогда
Изменение кинетической энергии ротора

где: J - момент инерции ротора; sвх - скольжение, при котором двигатель входит в синхронизм.
Если принять пусковую характеристику двигателя на участке s = 0 - sном линейной, работу по преодолению сопротивления нагрузки найдем по формуле
 (3.5)
(3.5)
где tвх - продолжительность входа в синхронизм. Ее найдем из закона сохранения момента количества движения.

Приняв  , получим
, получим
Подставляя это значение в формулу (3.5), находим
Неравенство (3.4) принимает вид
Отсюда
 (3.6)
(3.6)
Соотношение (3.6) определяет при заданных Мm и Мном скольжение асинхронного режима, при котором возможен вход двигателя в синхронизм.
ЛЕКЦИЯ 9
§ 3.5. Синхронные гистерезисные микродвигатели

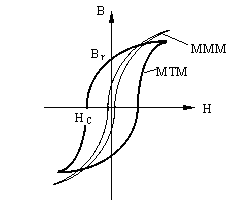
Рис. 3.13. Зависимости B = f (H) магнитотвердых (МТМ) и магнитомягких (МММ) материалов
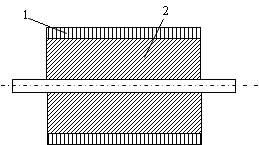
Статор синхронного гистерезисного микродвигателя (СГМД) ничем не отличается от статора известных синхронных и асинхронных микродвигателей. Ротор СГМД - гладкий неявнополюсный и состоит из двух частей (рис. 3.12): сплошного или шихтованного цилиндра 1 из магнитотвердого материала (МТМ), посаженного на немагнитную или ферромагнитную втулку 2.
Для выяснения принципа действия СГМД примем ротор целиком состоящим из МТМ, обладающего широкой петлей гистерезиса (рис. 3.13).
При включении обмотки статора в сеть возникает вращающееся магнитное поле, которое мы представим в виде постоянного магнита (рис.3.14). Под действием внешнего поля ротор намагнитится, т.е. его элементарные магнитики (домены, размер которых не превышает 10-3 см) сориентируются по полю и займут положение, показанное на рис. 3.14,а.
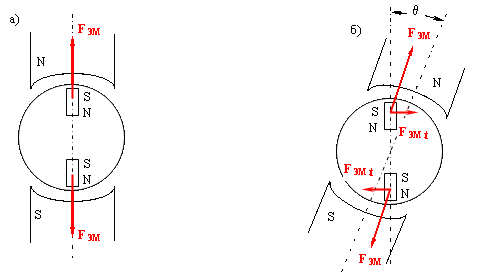
Рис. 3.14. К вопросу о принципе действия синхронного гистерезисного микродвигателя
Силы магнитного притяжения, действующие на ротор, направлены радиально, взаимно уравновешиваются и никакого момента не развивают. При повороте поля статора (рис. 3.14,б) вслед за ним будут стремиться повернуться элементарные магнитики ротора. Однако вследствие межмолекулярного трения, которое у магнитотвердого материала весьма значительное (явление гистерезисного запаздывания), их поворот будет отставать от поля статора на некоторый угол q. Силы магнитного притяжения в этом случае, кроме радиальных, получат тангенциальные составляющие, которые и создадут гистерезисный момент.
Значение гистерезисного момента определяется векторным произведением магнитных потоков ротора Фр и статора Фс [3]:

где k - коэффициент пропорциональности, зависящий от параметров СГМД.
Магнитные потоки статора и ротора, пространственный угол q, на который поток ротора отстает от потока статора, при симметричном питании не зависят от скорости вращения и определяются той коэрцитивной силой НС, при которой начинается поворот элементарных магнитиков. Это значит, что гистерезисный момент не зависит от скорости вращения, поэтому для пуска двигателя не требуется пусковая обмотка, необходимая для других синхронных двигателей.
В синхронном режиме ротор вращается синхронно с полем статора, поэтому ротор не перемагничивается. Его поток ФР сохраняется за счет остаточной индукции Brи вращается вместе с ротором с синхронной скоростью Поток тем больше, чем выше остаточная индукция. Двигатель работает как обычный синхронный двигатель с постоянными магнитами. Отличие только в том, что угол отставания оси поля ротора от оси поля статора не может превысить угол гистерезисного запаздывания. Для большинства двигателей в номинальном режиме угол нагрузки не превышает 20÷25о.
При асинхронном пуске СГМД, пока скорость ротора не равна скорости поля статора, кроме гистерезисного момента на ротор действует асинхронный момент, возникающий от взаимодействия магнитного потока статора и вихревых токов ротора (МВТ). В этом режиме момент двигателя равен
М = МГ + МВТ.
Найдем величину результирующего момента. Известно, что электромагнитная мощность, передаваемая со статора на ротор, равна потерям в роторе, поделенным на скольжение двигателя

Потери на вихревые токи пропорциональны квадрату частоты перемагничивания РВТ ~ f2 = (f1s)2, а потери на гистерезис - частоте перемагничивания в первой степени РГ ~ f = f1s. Тогда

где РГК, РВТК - потери на гистерезис и вихревые токи в неподвижном роторе (s = 1). Вращающий момент СГМД равен

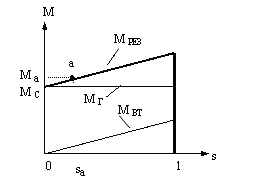
Рис. 3.15. Механическая характеристика СГМД и ее составляющие
На рис. 3.15 показана механическая характеристика и ее составляющие для идеального СГМД. В реальных двигателях характеристики не такие линейные, поскольку сказывается действие высших гармоник поля, кроме того, в двухфазных конденсаторных двигателях оно в большинстве случаев эллиптическое. Необходимо отметить, что в случае шихтованного цилиндра из МТМ и немагнитной втулки ротора момент вихревых токов практически равен нулю.
Гистерезисные микродвигатели могут работать в синхронном и асинхронном режимах. В этом легко убедиться, рассматривая рис. 3.15. Пока момент нагрузки не больше МС, СГМД работает как синхронный двигатель (его скольжение равно 0). При больших нагрузках он переходит в асинхронный режим (точка а). Причем переход из одного режима в другой и обратно происходит плавно, без рывков, что является одним из достоинств СГМД.
Исследования показали, что гистерезисный момент можно рассчитать по формуле

где: рГ - удельные потери на гистерезис (величина пропорциональная площади петли гистерезиса); V - объем магнитотвердого материала; f1 - частота сети; w1 - синхронная угловая частота вращения; p - число пар полюсов.
Перемагничивание ротора происходит под действием НС статора, которая в СГМД сравнительно небольшая. Поэтому для каждого конкретного двигателя существует такой объем V, при котором произведение рГV будет максимальным. Действительно, если V чрезмерно велико, то НС статора не сможет перемагнитить такой объем по предельной петле гистерезиса, перемагничивание будет идти по одной из частных петель гистерезиса, что соответствует малому значению рГ. С другой стороны, при чрезмерно малом V НС статора его легко перемагнитит. Но все равно, перемагничивание не может осуществляться по петле, большей предельной.
Требованию рГV = max отвечают две конструкции ротора (рис. 3.16).
В первой - втулка выполняется из ферромагнитного материала. Поток статора проходит в радиальном направлении, поэтому объем перемагничиваемого магнитотвердого материала здесь сравнительно небольшой, следовательно, он должен иметь достаточно широкую петлю гистерезиса (НС >300кА/м).
Во второй - втулка выполняется из немагнитного материала (алюминий или пластмасса). Магнитный поток статора проходит в основном по гистерезисному слою, поэтому объем перемагничиваемого материала сравнительно большой, следовательно, он должен быть с относительно узкой петлей гистерезиса (НС < 14 кА/м) [3].
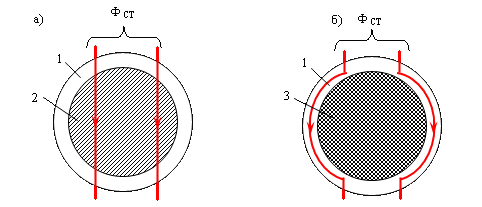
Рис. 3.16. Конструктивные схемы ротора СГМД: с ферромагнитной втулкой (а) и с немагнитной втулкой (б) 1 – кольцо из МТМ; 2 – ферромагнитная втулка; 3 – немагнитная втулка
Схема замещения СГМД приведена на рис. 3.17. Она содержит следующие сопротивления [1]:
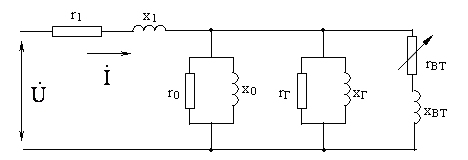
Рис. 3.17. Схема замещения синхронного гистерезисного микродвигателя
r1, x1 - активное и реактивное сопротивления фазы статора; r0, x0 - активное сопротивление,эквивалентное потерям в стали,ииндуктивное сопротивление, обусловленное магнитной проводимостью воздушного зазора; rГ, xГ - активное и реактивное сопротивления контура, учитывающего явление гистерезиса (первое эквивалентно потерям на гистерезис, второе - обусловливается магнитной проводимостью МТМ); rВТ, xВТ - активное и реактивное сопротивление контура, учитывающего действие вихревых токов (rВТ - эквивалентно потерям от этих токов, xВТ - обусловливается потоками рассеяния от вихревых токов). В синхронном режиме rВТ = ¥, поэтому данная ветвь разрывается.
Достоинства гистерезисных микродвигателей:
1)большой пусковой момент и момент входа в синхронизм;
2)плавность входа в синхронизм;
3)малое изменение тока статора (20 - 30 %) от пуска до холостого хода;
4)полисинхронизм - способность одного и того же ротора работать в статорах с различным числом полюсов;
5)сравнительно высокий КПД (до 60 %);
6)малый уровень шума.
Недостатки гистерезисных микродвигателей:
1)низкий сosj (0,3 - 0,45), что обусловливается низкой магнитной проводимостью МТМ и большим намагничивающим током. Кстати, этим объясняется малая кратность пускового тока;
2)большой технологический разброс характеристик двигателя из-за очень высокой чувствительности МТМ к отклонениям температуры от установленного значения при термической обработке;
3)качания ротора - значительные колебания мгновенной скорости ротора при резких изменениях нагрузки:
·N = (nmax – nmin)/nСР =10-4 у СГМД и
·N = 10-6 у двигателей с постоянными магнитами.
Попытки уменьшить качания ротора путем покрытия его тонким слоем меди не привели к желаемому результату.
ЛЕКЦИЯ 10
4. УНИВЕРСАЛЬНЫЕ КОЛЛЕКТОРНЫЕ МИКРОДВИГАТЕЛИ
Универсальными коллекторными микродвигателями (УКД) называются микродвигатели, которые могут работать от сети постоянного и переменного тока. Эти двигатели находят широкое применение в высокоскоростных приводах (кофемолки, пылесосы, электробритвы и т.п.), т.к. позволяют при питании от сети 50 Гц получать весьма значительные скорости вращения (до 30000 об/мин), чего невозможно добиться с помощью синхронных и асинхронных машин при частоте 50 Гц.
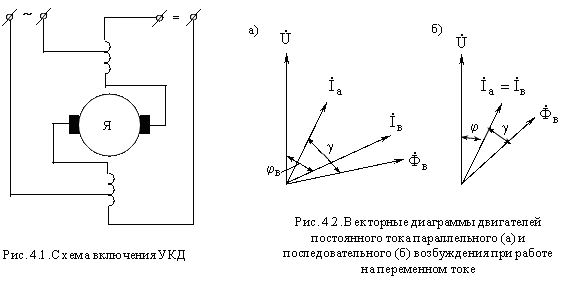
Конструктивно УКД отличаются от машин постоянного тока тем, что у них шихтована вся магнитная система (якорь, полюса, станина); обмотка возбуждения имеет дополнительные отводы и располагается по обеим сторонам от якоря (рис.4.1).
УКД всегда выполняются с последовательным возбуждением без дополнительных полюсов.
Если двигатель постоянного тока параллельного или последовательного возбуждения питать переменным током, двигатель будет развивать вращающий момент определенного направления, поскольку токи якоря и возбуждения будут изменять свои знаки одновременно. Другое дело, что вследствие большой индуктивности параллельной обмотки возбуждения, ток возбуждения будет значительно отставать от напряжения. В результате между током якоря и потоком возбуждения окажется большой угол сдвига и среднее значение момента станет небольшим. На рис. 4.2 приведены упрощенные векторные диаграммы двигателей параллельного и последовательного возбуждения при работе на переменном токе. Сравнивая эти диаграммы, легко сделать вывод, что УКД с последовательным возбуждение будет более рационален, чем с параллельным.
Работа УКД на постоянном токе ничем не отличается от работы обычного двигателя, а вот на переменном токе есть ряд особенностей.
1. Электромагнитный момент. Будем считать, что ток якоря iа и магнитный поток ф являются гармоническими функциями времени (рис.4.3)
| iа = Imsinw1t; ф = Фm sin(w1t - g), | (4.1) |
где g - угол, на который ток якоря опережает поток возбуждения (рис. 4.4).
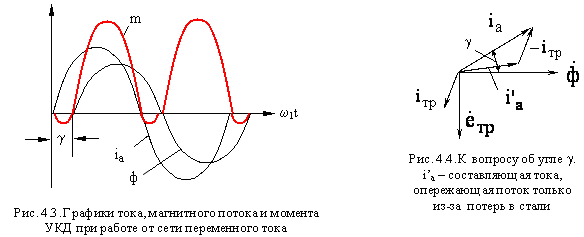
Как известно из общего курса электрических машин, ток, создающий магнитный поток, кроме намагничивающей составляющей всегда содержит небольшую активную составляющую, необходимую для покрытия потерь в стали. По этой причине ток опережает поток на небольшой угол (его называют «угол магнитных потерь»; он порядка 5о). В случае универсального коллекторного двигателя ток якоря будет опережать магнитный поток на больший угол (порядка 15о), т.к. он содержит дополнительную составляющую (-iТР), необходимую для компенсации размагничивающего действия коммутирующей секции (рис. 4.4).
Мгновенное значение электромагнитного момента
 | (4.2) |
Из рис. 4.3 и формулы (4.2) видно, что момент имеет две составляющие:
· 
постоянную
· и переменную, изменяющуюся с двойной частотой

Из графика момента на рис. 4.3 видно, что в отдельные промежутки времени момент становится даже отрицательным.
Среднее значение момента

Отрицательные значения момента и его пульсации вследствие большой частоты и значительных маховых масс вращающихся частей практически не сказываются на равномерности вращения двигателя. Однако в приводах, где требуется высокая стабильность мгновенной скорости, с ней нельзя не считаться.
2. Номинальная частота вращения. Формула частоты вращения двигателя на постоянном токе хорошо известна:
 | (4.3) |
На переменном токе структура формулы такая же,
 (4.4)
(4.4)
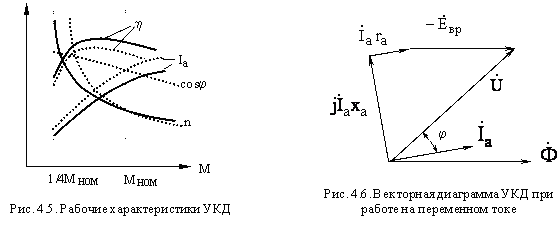
но в числителе формулы (4.4) появляется дополнительное падение напряжения Iаха. В результате частота вращения уменьшается. Чтобы уравнять частоты вращения на постоянном и переменном токе при номинальной нагрузке, часть витков обмотки возбуждения при питании переменным током отключают, что приводит к уменьшению магнитного потока и выравниванию скоростей (см. скоростную характеристику, показанную на рис.4.5, где сплошные линии обозначают работу на постоянном токе, а пунктирные – на переменном токе).
В связи с уменьшением магнитного потока при работе на переменном токе магнитная система двигателя оказывается слабо насыщенной, поэтому скоростная характеристика приближается к гиперболической, а токовая - к параболической.
Ток якоря при работе двигателя от сети переменного тока становится больше, чем при работе от сети постоянного тока из-за наличия реактивной составляющей и большей активной составляющей вследствие возрастания потерь в стали. По этим же причинам КПД машины получается меньшим.
Уравнение напряжения двигателя на переменном токе значительно сложнее, чем на постоянном токе, т.к. приходится учитывать ЭДС, которые индуцируются в обмотке якоря и обмотке возбуждения пульсирующим полем возбуждения, полем поперечной реакции якоря, полями рассеяния. Но если пренебречь насыщением и потерями в стали, выразить ЭДС через ток и соответствующие индуктивные сопротивления, уравнение напряжения можно привести к виду
 (4.5)
(4.5)
где raи xa– активные и реактивные сопротивления якорной цепи.
По уравнению (4.5) на рис. 4.6 построена векторная диаграмма УКД при работе на переменном токе.
3. Коммутация. При работе на переменном токе в коммутирующей секции кроме реактивной ЭДС наводится еще и трансформаторная ЭДС, т.к. секция пронизывается пульсирующим потоком возбуждения (рис.4.7,а).
Реактивная ЭДС совпадает с током якоря. Трансформаторная ЭДС, будучи производной магнитного потока, перпендикулярна ему (рис. 4.7,б). В этих условиях результирующая ЭДС коммутирующей секции может достигать весьма больших значений, особенно в период пуска, когда ток якоря наибольший. По указанным причинам коммутация машины на переменном токе заметно ухудшается по сравнению с работой на постоянном токе.
Установка дополнительных полюсов позволила бы скомпенсировать реактивную ЭДС. Трансформаторную же ЭДС скомпенсировать нельзя. При этом дополнительные полюса и компенсационные обмотки усложнили бы конструкцию машины, поэтому в микродвигателях они не применяются.
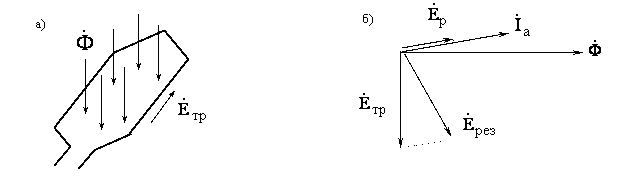
Рис. 4.7. Возникновение трансформаторной ЭДС в коммутируемой секции (а) и векторная диаграмма ЭДС коммутируемой секции (б)
Частота вращения УКМД регулируется так же, как и в любом двигателе последовательного возбуждения: либо изменением подводимого напряжения, либо шунтированием обмотки якоря или обмотки возбуждения.
К числу недостатков универсальных коллекторных двигателей, кроме отмеченных выше, следует отнести радиопомехи и значительный шум, создаваемый ими при работе с высокой скоростью вращения.
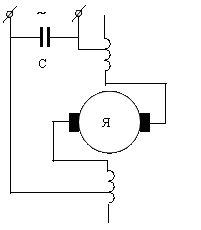
Рис. 4.8. Схема простейшего фильтра
Для борьбы с радиопомехами выполняют экранирование машины и симметрирование обмотки возбуждения, применяют электрические фильтры.
Корпус машины уже является экраном и поэтому в известном смысле поглощает радиопомехи. Со стороны коллектора часто на торец корпуса надевают защитный металлический колпак, вентиляционные отверстия закрывают медной или латунной сеткой, а выступающий конец вала замыкают специальной щеткой на корпус двигателя. Внутренние соединения обмоток выполняют экранированным проводами, причем экран соединяют с заземленным корпусом. Симметрирование обмотки возбуждения сводится к выполнению ее по обе стороны от якоря.
В простейшем виде электрический фильтр представляет собой конденсатор, включенный между проводами сети (рис.4.8).
Вопросы:
1)При каком условии график мгновенных значений момента не будет содержать отрицательных составляющих?
2)Почему с ростом нагрузки сos j двигателя уменьшается?
ЛЕКЦИЯ 11
5. БЕСКОНТАКТНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока обычного исполнения имеют ценное качество-возможность широко и плавно регулировать скорость вращения. Вместе с тем они обладают существенным недостатком, обусловленным щеточно-коллекторным узлом. Вполне естественно, что появилась мысль создать двигатели, обладающие достоинствами двигателей постоянного тока и свободные от их недостатков. Такие двигатели называются бесконтактными двигателями постоянного тока.
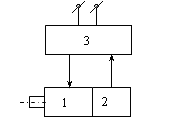
Рис.5.1. Структурная схема бесконтактного двигателя постоянного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 5.1):
1) бесконтактного двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
2) датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
3) коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
П р и н ц и п д е й с т в и я бесконтактного двигателя рассмотрим на примере упрощенной схемы (рис. 5.2). В ее состав входит двигатель с тремя обмотками на статоре, сдвинутыми в пространстве на 120 градусов и соединенными в звезду, ДПР с одним сигнальным элементом (СЭ) и тремя чувствительными элементами (ЧЭ) (их число равно числу обмоток статора), коммутатор, выполненный на трех транзисторах, работающих в ключевом режиме, т.е. в режиме "закрыт" или "открыт".
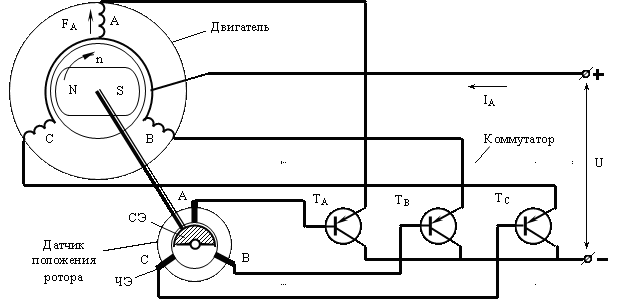
Рис. 5.2. Упрощенная принципиальная схема бесконтактного двигателя постоянного тока
В положении, показанном на рис.5.2, сигнальный элемент через чувствительный элемент "А" открывает транзистор ТА. По обмотке А протекает ток IА. Намагничивающая сила обмотки FА взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение (1-й такт на рис. 5.3). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший 30° СЭ будет воздействовать сразу на два ЧЭ: на "А" и на "В". Это значит, что будут открыты сразу два транзистора: ТА и ТВ. Ток будет протекать по обеим обмоткам А и В. Появится результирующая НС статора FАВ, которая повернется на 60° по сравнению с первым положением (2-й такт на рис. 5.3).
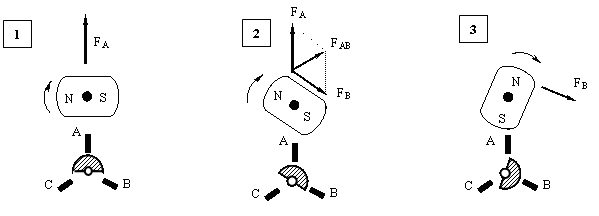
Рис. 5.3. Первых 3 такта в работе бесконтактного двигателя постоянного тока
Эта НС продолжает взаимодействовать с полем постоянного магнита; двигатель продолжает развивать вращающий момент.
Когда угол поворота станет чуть больше 90°, транзистор ТА закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с НС этой обмотки, однако вращающий момент по прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3-й такт на рис. 5.3). В конечном итоге двигатель разовьет такую скорость, при которой его момент будет уравновешиваться моментом нагрузки.
Если бы бесконтактный двигатель имел обмоток, чувствительных элементов и транзисторов столько же, сколько обычный двигатель имеет коллекторных пластин, то по своим свойствам и характеристикам они ничем бы не отличались друг от друга. Однако увеличение числа элементов сильно усложняет конструкцию машины. Поэтому в реальных двигателях число обмоток, а соответственно, и число чувствительных элементов и транзисторов не превышает 3-4.
Малое число обмоток обусловливает ряд особенностей работы бесконтактного двигателя постоянного тока.
1. Пульсация вращающего момента - возникает вследствие скачкообразного перемещения НС статора (см. положения 1,2,3 рис. 5.3). В соответствии с общими законами электромеханического преобразования энергии момент бесконтактного двигателя может быть определен как скалярное произведение магнитного потока ротора и НС взаимодействующих обмоток статора
 | (5.1) |
где: см - постоянный коэффициент; q - угол между потоком ротора и НС статора.
Так как при вращении двигателя угол q непрерывно меняется, то и момент двигателя не остается постоянным.
2. Реакция якоря периодически изменяется, становясь то поперечной, то продольно намагничивающей, то продольно размагничивающей (рис. 5.4). Объясняется это опять-таки скачкообразным перемещением НС статора (якоря). Размагничивающее действие поля статора особенно сильно при пуске двигателя, т.к. при этом противо-ЭДС равна 0, а ток - наибольший. С этим необходимо считаться при выборе постоянных магнитов, стабилизация которых происходит в режиме короткого замыкания.
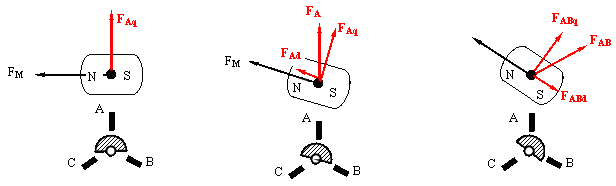
Рис. 5.4. Реакция якоря в бесконтактном двигателе постоянного тока
3. Пульсация токов в обмотках статора и суммарного тока двигателя объясняется дискретным питанием обмоток (в тот момент, когда открыты два транзистора, потребляемый ток вырастает в два раза по сравнению с режимом, когда открыт только один транзистор).
4. Влияние индуктивности обмоток статора. В обычном двигателе секции якоря маловитковые, поскольку общее число витков якоря делится на большое число секций. Индуктивность таких секций сравнительно небольшая. В бесконтактном двигателе общее число витков якоря разбивается на 3-4 обмотки (секции). В результате секции получаются многовитковыми, а, следовательно, обладающими большой индуктивностью т.к. L~W2
С учетом ряда допущений уравнение напряжения для якоря можно записать в виде
 (5.2)
(5.2)
Решая его относительно тока, получим
 | (5.3) |
где Т = L/r - электромагнитная постоянная времени.
Выражение перед круглой скобкой есть ток якоря при отсутствии индуктивности. Тогда
 (5.4)
(5.4)
При больших скоростях, когда время коммутации невелико, ток в обмотках не успевает достигать установившегося значения. Его эффективное значение становится меньше, чем при L = 0
Вращающий момент прямо пропорционален току якоря, поэтому
 | (5.5) |
или
 (5.6)
(5.6)
Анализ выражения (5.6) показывает, что момент имеет две составляющие. Первую - не зависящую от времени. Она равна моменту при отсутствии индуктивности. Вторую - переменную. Она появляется из-за индуктивности обмоток. Эта составляющая при всех скоростях имеет отрицательное значение (U > E). Поэтому можно утверждать, что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий момент обычного коллекторного двигателя.
Подставим значение ЭДС Е = сеnФ в формулу (5.6), получим механическую характеристику бесконтактного двигателя
 (5.7)
(5.7)
Выразим эту характеристику в относительных единицах, приняв за базисный момент пусковой момент (n = 0, U = Uном), а за базисную скорость - скорость холостого хода (М = 0, U = Uном). Время t = ¥
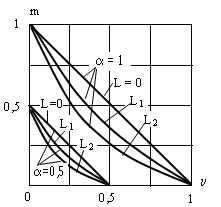
Рис. 5.6. Механические характеристики бесконтактного двигателя постоянного тока при разных значения α и L: L2 > L1 > 0
Разделим обе части уравнения (5.7) на Мп:
 (5.8)
(5.8)
Обозначим a = U/Uном. С учетом n0 = U/(сеФ) получим
 (5.9)
(5.9)
где n = n/n0 - относительная скорость двигателя.
На рис. 5.6 показаны механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.








