2015-07-14
2015-07-14 328
328Индукционный двигатель с полым немагнитным ротором (ДПР) в последнее время получил широкое распространение как исполнительный в установках автоматики и телемеханики, в следящих системах и в счетно-решающих устройствах.
Конструкция индукционного двигателя с полным немагнитным ротором показана на рисунке 2.1.
Рисунок 2.1 Схема конструкции индукционного двигателя с полым
немагнитным ротором:
1-внешний статор; 2-ротор; 3-внутренний статор.
Статор состоит из двух частей: внешней 1 и внутренней 3. В пазах внешнего статора располагаются две обмотки: обмотка возбуждения и обмотка управления, оси которых сдвинуты на 90°. Внутренний статор (сердечник) является частью магнитопровода и служит лишь для уменьшения магнитного сопротивления. Пакет статора набирается из листов электротехнической стали толщиной 0,3…0,35 мм.
В зазоре между внешней и внутренней частями статора размещается ротор 2, выполненный в виде стакана с толщиной стенок 0,2…0,8 мм из немагнитного материала: алюминия, дюралюминия, бронзы. Ротор закрепляется на валу, который проходит внутри сердечника и вращается в подшипниках. У двигателей малой мощности (менее 1 Вт) с целью уменьшения габаритов обе обмотки размещаются на внутреннем статоре.
Принцип действия индукционного двигателя с полым немагнитным ротором состоит в следующем. Обмотки возбуждения и управления, питаемые от сети переменного тока, создают пульсирующие магнитные потоки, сдвинутые в пространстве на 90° (рисунок 2.2).
Для получения вращающегося магнитного ноля необходим сдвиг намагничивающих сил обмоток управления и возбуждения в пространстве и во времени, причем в общем случае это вращающееся магнитное поле будет эллиптическим. Круговое вращающееся поле будет иметь место только тогда, когда оси обмоток WВ и WУ смещены в пространстве точно на 90°, амплитуды потоков ФH и ФV равны между собой, оба потока имеют синусоидальную форму и фазовый сдвиг во времени равен 90°, т.е. верны соотношения:
ФВ=ФmB·sinωt; (2.1)
ФУ=ФmV·cosωt. (2.2)
Фазовый сдвиг во времени достигается либо питанием двигателя от двухфазной сети, либо включением в управляющую обмотку конденсатора (при питании двигателя от однофазной сети). В первом случае сдвиг фазы 90° может быть постоянным при всех режимах работы (если неизменна величина емкости). Обычно при пуске скольжение s = 1,0. Вращающееся магнитное поле статора, пересекая ротор, наводит в нем ЭДС, вызывающую токи в тонкостенном полом роторе. От взаимодействия поля статора с токами ротора возникает электромагнитный момент, под действием которого ротор приходит во вращение. Вращающий момент двигателя с немагнитным ротором равен сумме моментов прямой и обратной составляющих магнитного поля, на которые можно разложить эллиптическое вращающееся поле.
Рисунок 2.2 Схема расположения обмоток ДПР
Механическая характеристика (зависимость скорости вращения от момента двигателя) может быть получена из выражений (2.1) и (2.2):
 Н·м, (2.3)
Н·м, (2.3)
где М - электромагнитный момент, Н∙м;
U в - напряжение на обмотке возбуждения, В;
nс – синхронная скорость, мин-1;
 - коэффициент сигнала;
- коэффициент сигнала;
К – обмоточный коэффициент;
rрот – активное сопротивление ротора, приведенное к числу витков обмотки управления, Ом.
Из уравнения (2.3) следует, что при постоянном коэффициенте сигнала зависимость вращающегося момента реального двигателя от скорости вращения становится прямолинейной, причем с ростом скорости момент убывает. При идеальном холостом ходе (М = 0) скорость двигателя n0 равна синхронной n0 только в случае кругового поля (α = 1). При других значениях коэффициента сигнала скорость холостого хода определяется степенью эллиптического поля, т.е. величиной обратной составляющей ноля.
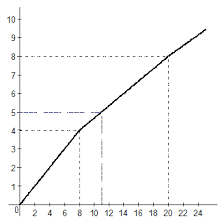
Расчеты для построения механических характеристик производятся по формулам, приведенным ниже.
Относительная скорость вращения:
v = n / nо. (2.4)
Относительный момент вращения:
m = М / Мn. (2.5)
Полезная мощность двигателя:
Рмех = Р2 = 2π М n. (2.6)
Подводимая к двигателю мощность:
Р1 = Ру+Рв. (2.7)
Коэффициент полезного действия:
 . (2.8)
. (2.8)
Коэффициенты мощности в обмотках управления и возбуждения:

 . (2.9)
. (2.9)
Относительные мощности возбуждения и управления и полезная мощность, соответственно:
Pв*= Pв / Pуп;
Pу*= Pу / Pуп;
Pмех*= Pмех/ Pуп. (2.10)
Широкое распространение индукционных малоинерционных ДПР обусловлено следующими преимуществами перед другими типами двигателей:
- малым моментом инерции, обусловленным тем, что ротором является тонкостенный стакан из легкого немагнитного материала;
- плавным и бесшумным ходом из-за отсутствия зубцевых гармоник в кривой поля;
- широким диапазоном регулирования nmax / nmin = 10…100;
- высокой краткостью пускового момента вследствие повышенного сопротивления ротора, что в сочетании с малым моментом инерции обеспечивает его быстродействие и повышает устойчивость следящих систем;
- способностью двигателя к самоторможению из-за высокого критического скольжения sкр (скольжения, соответствующего максимальному моменту), благодаря которому возрастает тормозное действие обратного поля;
- достаточной стабильностью рабочих свойств двигателя при изменениях температуры;
- отсутствием трущихся контактов, искровой коммутации и связанных с ней радиопомех.
К недостаткам ДПР следует отнести:
- относительно большие размеры двигателя, обусловленные необходимостью увеличить, критическое скольжение до значения sкр > 1 и большим воздушным зазором δ = (0,6…1,3 мм);
- относительно низкий коэффициент полезного действия из-за большой величины рабочего скольжения (s = 50%);
- низкий cosφ, вследствие того, что намагничивающая сила, необходимая для проведения потока через большой воздушный зазор, велика.