 2015-07-14
2015-07-14 629
629Из большого числа градиентных методов остановимся на методе двух производных, являющимся одним из наиболее быстродействующих методов нелинейного программирования. В этом методе переход из одной точки сканирования оси Х в другую выполняется с шагами, равными инкременту  , то есть отношению первой и второй производных от целевой функции, без расчета критерия оптимальности на каждом шаге;
, то есть отношению первой и второй производных от целевой функции, без расчета критерия оптимальности на каждом шаге;
 . (5.36)
. (5.36)
Переход из предыдущей точки  в последующую точку
в последующую точку  выполняется по формуле
выполняется по формуле
 . (5.37)
. (5.37)
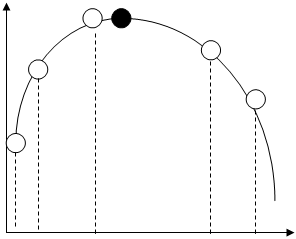
Метод основан на специфических свойствах инкремента. Рассмотрим качественно характер инкремента в при различных значениях параметра Х (рис. 5.5), если заданы целевая функция  = МАХ, область исследования
= МАХ, область исследования  и погрешность определения точки экстремума
и погрешность определения точки экстремума  .
.


1 2
 Х1 Х3Х2
Х1 Х3Х2  Х
Х
Рис. 5.5. Иллюстрация метода двух производных
Анализ первой точки показывает, что при Х=Х1 производная  является положительной величиной, а вторая производная
является положительной величиной, а вторая производная  – отрицательной, тогда величина инкремента
– отрицательной, тогда величина инкремента  является положительной и от точки Х1 мы переместимся вправо в направлении к экстремуму в новую расчетную точку. Во второй точке при Х=Х2 производная является отрицательной величиной, и вторая производная – отрицательна, тогда величина инкремента станет отрицательной и от точки Х2 мы переместимся влево в направлении к экстремуму в новую расчетную точку. Сопоставляя поведение расчета в точках 1 и 3, нетрудно заметить, что в обоих случаях инкременты положительны, но
является положительной и от точки Х1 мы переместимся вправо в направлении к экстремуму в новую расчетную точку. Во второй точке при Х=Х2 производная является отрицательной величиной, и вторая производная – отрицательна, тогда величина инкремента станет отрицательной и от точки Х2 мы переместимся влево в направлении к экстремуму в новую расчетную точку. Сопоставляя поведение расчета в точках 1 и 3, нетрудно заметить, что в обоих случаях инкременты положительны, но  будет существенно меньше
будет существенно меньше  , таким образом, чем ближе находится расчетная точка к экстремуму, тем меньше величина очередного шага, при попадании в ходе решения задачи точно в точку экстремума получаем величину
, таким образом, чем ближе находится расчетная точка к экстремуму, тем меньше величина очередного шага, при попадании в ходе решения задачи точно в точку экстремума получаем величину  . Таким образом метод самостоятельно перемещает точку поиска экстремума в околоэкстремальную область без расчета критерия оптимальности, что существенно ускоряет расчет задачи оптимизации.
. Таким образом метод самостоятельно перемещает точку поиска экстремума в околоэкстремальную область без расчета критерия оптимальности, что существенно ускоряет расчет задачи оптимизации.
Алгоритм решения предельно прост:
1. В области исследования задачи выбираем произвольную точку Х и рассчитываем для нее величину инкремента .
2. Переходим в новую точку расчета с шагом, равным величине инкремента .
3. Расчет по пункту 2 выполняем до тех пор, пока величина не станет меньше погрешности расчета и по последнему значению параметра Х рассчитывается значение критерия оптимальности .
 Особенности поиска оптимальных условий ведения процесса
Особенности поиска оптимальных условий ведения процесса








