 2015-07-21
2015-07-21 390
390j = 3
| X(3) | U(3) | X(4) | f(3) | F(4) | f(3)+F(4) | УОТ |
| * |
j = 2
| X(2) | U(2) | X(3) | f(2) | F(3) | f(2)+F(3) | УОТ |
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
j = 1
| X(1) | U(1) | X(2) | f(1) | F(2) | f(1)+F(2) | УОТ |
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
| * | ||||||
j = 0
| X(0) | U(0) | X(1) | f(0) | F(1) | f(0)+F(1) | УОТ |
| * | ||||||
Координаты оптимальной траектории.
Оптимальная траектория выделена в расчетных таблицах зеленым цветом.
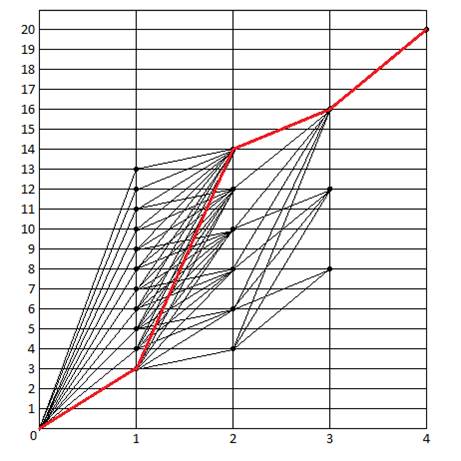
Ее координаты:
X(0) = 0, X(1) = 3, X(2) = 14, X(3) = 16, X(4) = 20.
Отметим траекторию также на графике красном цветом:
Оптимальное значение целевой функции.
Таким образом, оптимальная траектория (порядок заполнения грузового отсека) имеет следующие значения управления: U(0) = 6, U(1) = 1, U(2) = 2, U(3) = 1. Этому порядку заполнения грузового отсека соответствует минимальное значение целевой функции и оно равно 1710 тонн.








