| Машина - устройство, выполняющее механические движения для преобразования энергии, материалов и информации в целях замены или облегчения физического и умственного труда человека. |
| Механизм – устройство, предназначенное для преобразования движения одних звеньев (тел) в требуемое движение других тел (редуктор, коробка передач и др.). Или Механизм– такая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья совершают однозначно определяемые движения. С точки зрения функционального назначения механизмы машины обычно делятся на следующие виды: а) механизмы двигателей (разн.энергию в мех: паровые машины, турбины) и преобразователей (мех. в др. виды энергии:насосы компрессоры), б) передаточные механизмы (привод – передача энергии от двигателя к исполнительным механизмам, задача: уменьшение частоты вращения вала двигателя до уровня частоты вращ. основного вала технологич. машины), в) исполнительные механизмы(задача: изменение формы, состояния, положения и свойств обрабатываемых среды или объекта. пример: механизмы прессов, деформирующих обрабатываемый объект), г) механизмы управления, контроля и регулирования (измерительные механизмы по контролю размеров, давления уровня жидкостей), д) механизмы подачи, транспортировки, питания и сортировки обрабатываемых сред и объектов (механизмы сортировки готовой продукции по размерам, весу и конфигурации и т.д.), е) механизмы автоматического счета, взвешивания и упаковки готовой продукции. структура механизмов − совокупность и взаимоотношения входящих в систему элементов. |
| Деталь деталь– часть машины, которую изготовляют без сборочных операций. Детали могут быть простыми (винт, шпонка) или сложными (коленчатый вал, станина станка). Несколько деталей, собранных в одно целое, образуют сборочную единицу или узел. |
| Звено - твердое тело, входящее в состав механизма. Стойка- неподвижное звено., Входное звено -Звено, которому сообщается движение, преобразуемое в требуемые движения других тел. выходное звено- Звено, совершающее движение, для выполнения которого предназначен механизм. В зависимости от конструкции звено может быть простым, т.е. выполненным без сборочных операций, или составным. В таком случае простое звено и отдельные элементы сложного звена называют деталями. Звенья различают по конструктивным признакам (зубчатое колесо, поршень, вал и т.д.), по деформативности (гибкое и жесткое звено), по характеру их движения: кривошип - звено, совершающее полнооборотное вращательное движение вокруг неподвижной оси; коромысло - звено, совершающее вращательное движение на неполный оборот; шатун - звено, совершающее плоское движение; ползун - звено, совершающее возвратно-поступательное движение; кулиса - подвижная направляющая; камень - ползун, перемещающийся по кулисе. |
| Кинематическая пара - подвижное соединение двух соприкасающихся звеньев, допускающих их относительное движение. Кинематическая пара, у которой соединение двух звеньев происходит по поверхности, называется низшей, в тех случаях, когда соединение двух звеньев происходит по линии или точке, такую кинематическую пару называют высшей. Высшие кинематические пары имеют компактную конструкцию и меньшие потери на трение, чем низшие пары. Но низшие пары более износостойкие, обладают большей нагрузочной способностью. По предложению акад. И.И. Артоболевского кинематические пары делят на классы. Для свободного тела в пространстве число степеней подвижности равно шести, тогда H = 6 - S, где S - число наложенных условий связи, изменяющееся от 1 до 5. При S = 6 кинематическая пара становится жестким звеном, а при S = 0 кинематической пары не существует. При S = 1 кинематические пары имеют пять степеней подвижности и от-носятся к первому классу, при S= 2 - четыре степени подвижности и относятся ко второму классу. Наибольшее распространение получили кинематические па-ры 5 класса (одноподвижные). К ним относятся поступательная, вращательная и винтовая пары. |
Структурная схема 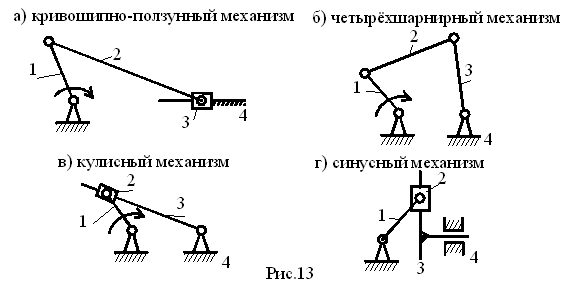 |
| Кинематический расчет привода Алгоритм: 1)определить требуемую мощность привода механизма подъема груза в кВт 2)определить общий коэффициент полезного действия (КПД) привода 3) Для поиска оптимального варианта привода необходимо знать пределы передаточных чисел редуктора. 4)Уточнение передаточных чисел привода 5)Частота вращения валов 6)Крутящие моменты на валах в Нм |
| Передаточное число– отношение диаметров ведомого элемента D2 к ведущему D1 : u= D2 ÷ D1 =w1÷w2=n1÷n2, где w1,2 – угловые скорости, n1,2 – частоты вращения. |
| Мощность и КПД Мощность − производная от совершаемой работы по времени, которую можно фактически назвать "скоростью совершения работы" или "скоростью преобразования энергии". Мощность при поступательном движении N=F*V и при вращательном движении N=M*ω F – сила, V – скорость, M – вращающий момент, ω – угловая скорость Потери на трение в механизмах учитываются коэффициентом полезного действия (КПД), который показывает, сколько процентов составляет полезная мощность (полученная потребителем через выходное звено) от затраченной мощности (полученной входным звеном от двигателя). КПД фактически учитывает все потери на трение. η=Nвых/Nвх |
Определение вращающих моментов и частот вращения звеньев привода Частота вращения быстроходного вала, промежуточного и тихоходного:nдв- синхронная частота вращения  ; об/мин. ; об/мин.  ; об/мин. ; об/мин.  ; об/мин.Вращающий момент электродвигателя определяется по формуле: ; об/мин.Вращающий момент электродвигателя определяется по формуле:  ; Н м.Вращающие моменты соответственно на быстроходном, промежуточном и тихоходномвалах определяются по формулам: ; Н м.Вращающие моменты соответственно на быстроходном, промежуточном и тихоходномвалах определяются по формулам:  ; ;  ; ;  . . |
| Силы в кинематических парах плоских механизмов (без учета трения). В отличие от кинематики, в динамике механизмов и машин изучается движение звеньев в зависимости от сил, действующих на кинематические пары и звенья механизма, вызывающих это движение. Анализ действующих сил необходим для определения мощности, необходимой для движения механизма, расчета на прочность и износостойкость отдельных его деталей, выбора рациональных размеров звеньев и их формы. Все внешние силы и пары сил, которые могут действовать на звенья механизма или машины разделяют на несколько групп. Силы движущие Рд. Эти силы приложены к ведущим звеньям и предназначены для преодоления сопротивлений машины. Считают, что при работе механизма они совершают положительную работу. К числу движущих сил можно отнести давление газов на поршень двигателя внутреннего сгорания; момент, развиваемый электродвигателем и др. Силы сопротивления. Это силы, для преодоления которых создается машина или механизм. Их подразделяют на силы «полезного» и «вредного» сопротивления. Силы «полезных» сопротивлений приложены к ведомым звеньям машины и направлены так, что препятствуют их движению. На преодоление этих сил затрачивается полезная работа машины.«Вредными» называются сопротивления, вызывающие непроизводительную затрату энергии движущих сил. Это силы, действующие в кинематических парах, - силы трения, удара и др., а также силы сопротивления среды. Силы тяжести G. Равнодействующие сил тяжести машины и ее звеньев имеют постоянные модули и приложены в центрах их тяжести. В зависимости от направления перемещения центров тяжести эти силы совершают или положительную работу (перемещение вниз), или отрицательную (перемещение вверх) работу. Силы инерции. Силы инерции и моменты сил инерции возникают при переменном движении звеньев механизма. Это силы воздействия ускоряемого тела на тела, вызывающие его ускорение. Реактивные силы. В кинематических парах возникают силы взаимодействия звеньев – реакции. В их обозначениях первая цифра в индексе указывает, со стороны какого звена действует сила, а вторая – номер звена, на которое она действует т.е. силы равны по модулю, но имеют противоположные направления. |
 2015-08-12
2015-08-12 1178
1178
