 2015-08-21
2015-08-21 7434
7434Пуск и торможение – основные динамические режимы электроприводов, в процессе которых изменяются ω и другие величины во времени. В момент подключения электродвигателя к сети без соответствующих пусковых устройств он будет потреблять из сети ток, значительно превышающий Iн, т.к. сопротивления обмотки статора двигателя с неподвижным якорем мало. По мере разгона двигателя увеличивается ЭДС якоря, а ток уменьшается. Большой пусковой ток нежелателен, т.к. в обмотках растут потери, способные вызвать их перегрев, и вследствие электромагнитного взаимодействия между проводами обмоток, возможно их повреждение. На коллекторах может возникнуть недопустимое искрение, пусковой момент на валу может развить большее чем необходимо ускорение.
В зависимости от величины статического момента различают легкий, нормальный и тяжелый режимы пуска.
К легкому относят режим пуска, когда статический момент не превышает 35-40%  (насосы, вентиляторы при закрытой задвижке).
(насосы, вентиляторы при закрытой задвижке).
Нормальный режим пуска, когда М с = ( ) (вентиляторы, насосы при открытых задвижках, небольшие ленточные конвейеры). Тяжелый режим, когда М с >
) (вентиляторы, насосы при открытых задвижках, небольшие ленточные конвейеры). Тяжелый режим, когда М с >  (подъемные машины, нагруженные конвейеры).
(подъемные машины, нагруженные конвейеры).
Много лет существовала два основных способа пуска асинхронных электродвигателей: непосредственно (прямое) включение короткозамкнутого электродвигателя в сеть при полном или пониженном напряжении и реостатный пуск. Они широко распространены и имеют ряд взаимодействий. С появлением частотных преобразователей стали применять пуск при пониженной частоте питающего напряжения с выхода преобразователя частоты (ПЧ).
Прямое включение асинхронного короткозамкнутого электродвигателя на полное напряжение сети – самое распространенное среди электродвигателей малой и средней мощности. Его достоинства – простота пуска, надежность, экономичность пусковой операции. Недостатки – большой пусковой ток I пуск= ( 7) I н, малый пусковой момент
7) I н, малый пусковой момент  .
.
Большая величина пускового тока вызывает снижение напряжения в питающей сети, в обмотках трансформатора или генератора, а также нежелательные удары в передаточных устройствах.
Снижение напряжения в питающей сети создает неблагоприятные условия как для пуска данного электродвигателя, так и для работы подключенных электроприемников. Предельная мощность асинхронного короткозамкнутого электродвигателя, пускаемого прямым включением, зависит от мощности источника питания. При питании от трансформатора силовых и осветительных электроприемников рекомендуется включать электродвигатель, мощность которого не превышает 25% мощности трансформатора по схеме прямого пуска.
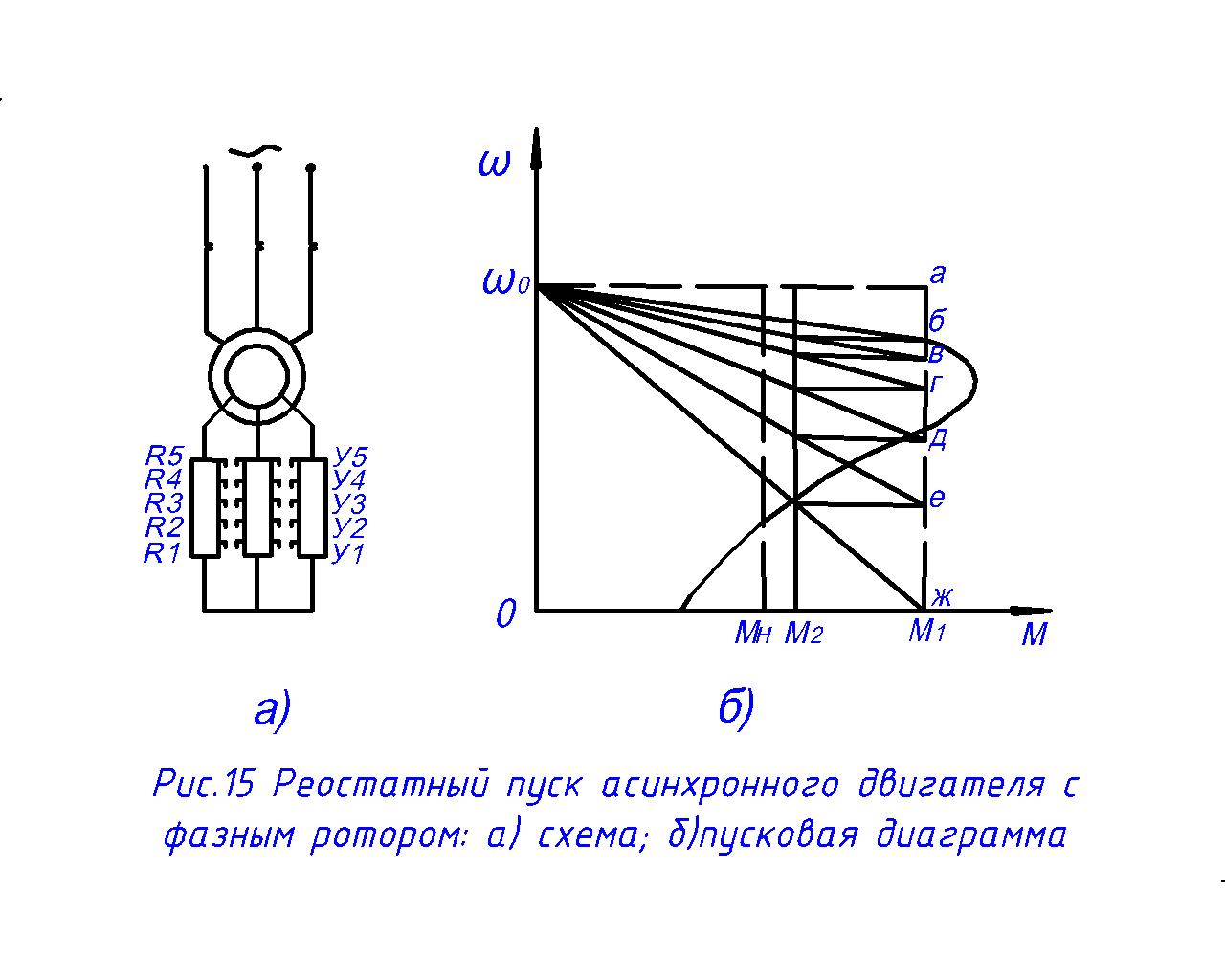
По мере нарастания скорости вращения электродвигателя сопротивление реостата постепенно уменьшается за счет переключения его ступеней. После окончания процесса пуска реостат замыкается накоротко, рис.15а.
В современном автоматизированном электроприводе выведение пусковых сопротивлений осуществляется путем замыкания ступеней пусковых сопротивлений  ,
,  ,
,  ,
,  ,
,  контакторами ускорения.
контакторами ускорения.  ,
,  ,
,  ,
,  .
.
Расчет пусковых сопротивлений реостата наиболее просто и удобно осуществляется графическим методом, сущность которого заключается в следующем. На основании каталожных данных с помощью формул (Мs) и (S) строится естественная механическая характеристика электродвигателя (обычно устойчивая ее часть) в любом удобном масштабе, рис.15б. Затем задаются наибольшим и наименьшим пусковым моментами. Наибольший пусковой момент М 1 обычно принимается равным (0,8 ¸ 0,85) М кр. Величина наименьшего пускового момента М 2 должна быть несколько больше момента сопротивления, так как в противном случае электродвигатель не разгонится. Чем ближе М 2 к М н, тем больше среднее значение пускового момента, что не желательно для ускорения пускового процесса. Но, как следует из пусковой диаграммы на рис 15(б), увеличение М 2 вызывает увеличение числа ступеней сопротивления, что не выгодно, так как потребует большее количество контакторов ускорения при автоматическом – разгоне и большее число контакторов пускового реостата при ручном управлении. Обычно принимают 3-6 пусковых ступеней и из этого условия выбирают М 2.
Реостатные механические характеристики проводятся на пусковой диаграмме последовательно, начиная с первой нижней. Отрезки аж, ае, ад и т.д. пропорциональны сопротивлению роторной цепи, и в масштабе для сопротивлений будут соответствовать сопротивлениям отдельных ступеней пускового реостата. Первой ступени соответствует отрезок аж, второй – ае, третьей – ад и т. д. Отрезок АБ будет соответствовать внутреннему сопротивлению цепи ротора R р. Первая секция пускового реостата определяется отрезком же, вторая – ед, третья – дг и т. д. Суммарное сопротивление реостата определяется отрезком бж.
Пример 3:
Рассчитать пусковые сопротивления для асинхронного электродвигателя с фазным ротором при пуске в пять реостатных ступеней. Статический момент на валу электродвигателя равен номинальному.
Каталожные и расчетные данные электродвигателя приведены в примере 2.
Решение:
Наибольший момент при пуске:

Наименьший момент при пуске подбираем опытным путем для получения шести реостатных ступеней в пределах  .
.
Сопротивление фазы обмотки ротора:

Сопротивления реостатных ступеней определяется из выражения:
первой  ;
;
второй 
третьей 
четвертой  ;
;
пятой  ;
;
Общее сопротивление пускового реостата для одной фазы:

или 








