 2015-08-21
2015-08-21 459
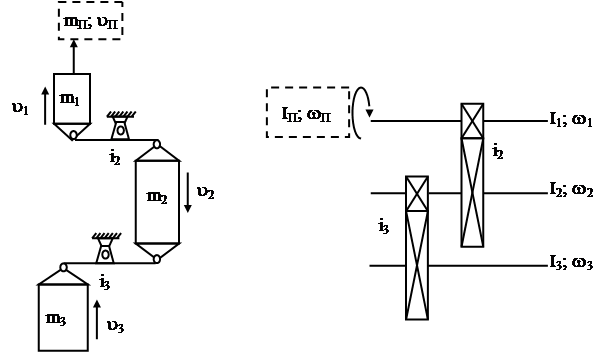
459Условием динамического приведения масс (моментов инерции) является равенство кинетических энергий приведенной массы mП (приведенного момента инерции IП) и всех масс (моментов инерции) действительного механизма.
Если массы, движущиеся поступательно (рис. 7а), приводят к точке приложения приведенной массы mП, движущейся со скоростью uП, можно записать
 , (1)
, (1)
откуда
 |
 . (2)
. (2)
а) б)
Рис. 7. Условные схемы для приведения:
а) поступательное движение; б) вращательное движение.
Учитывая, что  ,
,  ,
,  , для нашей схемы получим
, для нашей схемы получим
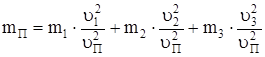
 . (3)
. (3)
Аналогично, для вращательного движения масс (рис. 7б)
 . (4)
. (4)
Если механизм содержит движущиеся поступательно и вращающиеся элементы, массу необходимо выражать через момент инерции или момент инерции через массу.
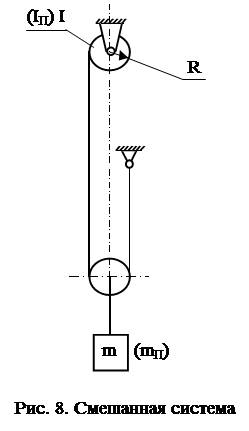
Например, требуется привести массу груза m, поднимаемого с помощью троса, наматываемого на барабан радиусом R (рис. 8).
Приведенный момент инерции системы
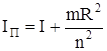 , (5)
, (5)
приведенная масса системы
 , (6)
, (6)
где n – кратность полиспаста.








