2015-09-07
2015-09-07 1181
1181Ректор университета
проф.___________В.К.Булгаков
“______”______________2001 г.
ТИПОВЫЕ ПРИВОДЫ И МЕХАНИЗМЫ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ.
Методические указания к выполнению курсового проекта для студентов специальностей 120100 “Технология машиностроения”,
120200 “Металлорежущие станки и инструменты”,
120900 “Проектирование технических и технологических комплексов”.
Анатолий Александрович Шабалин
Рассмотрены и рекомендованы к изданию кафедрой
“Компьютерное проектирование и сертификация машин”
Зав.кафедрой________________________С.И.Клепиков
“______”______________2001 г.
Рассмотрены и рекомендованы к изданию
методическим советом института информационных технологий
Председатель совета__________________В.М.Давыдов
“______”______________2001 г.
Нормоконтролер_____________________А.И.Иволгин
“______”______________2001 г.
Хабаровск
Издательство ХГТУ
Министерство образования Российской Федерации
Хабаровский государственный технический университет
ТИПОВЫЕ ПРИВОДЫ И МЕХАНИЗМЫ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ.
Методические указания к выполнению курсового проекта для студентов специальностей 120100 “Технология машиностроения”,
120200 “Металлорежущие станки и инструменты”,
120900 “Проектирование технических и технологических комплексов”.
Хабаровск
Издательство ХГТУ
УДК 621.9.06
Методические указания к выполнению курсового проекта для студентов специальностей 120100 “Технология машиностроения”, 120200 “Металлорежущие станки и инструменты”, 120900 “Проектирование технических и технологических комплексов” /Сост. А.А.Шабалин. –Хабароск: Изд-во Хабар. гос. техн. ун-та, 2000.-7 с.
Методические указания разработаны на кафедре “Компьютерное проектирование и сертификация машин” для оказания методической и организационной помощи при выполнении курсового проекта. В методических указаниях дается тематика курсового проекта, его объем и содержание и предлагается последовательность работы над проектом с учетом рекомендуемой литературы.
Печатается в соответствии с решениями кафедры "Компьютерное проектирование и сертификация машин" и методического совета ИИТ
| © | Издательство Хабаровского государственного технического университета, 2001 |
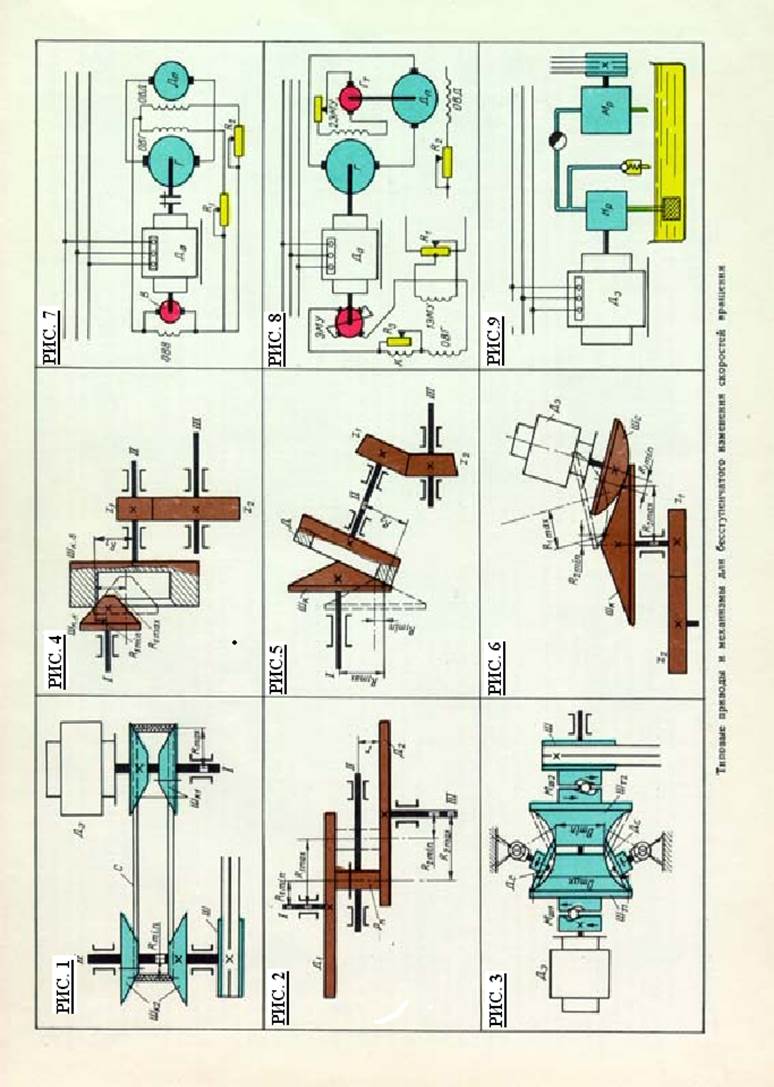
Приводы и механизмы для бесступенчатого
Изменения скорости вращения.
Для достижения максимальной производительности станка и удобства его обслуживания в станкостроении находят применение различного вида
приводы и механизмы для бесступенчатого изменения скорости. Последние бывают механического(вариаторы), электрического и гидравлического типов.
Вариатор с раздвижными конусами. Этот тип вариатора(рис.1) выполняется с различным видом связи С. В качестве связи С применяются стандартные или специальные клиновые ремни, специальная сеть или стальное или стальное кольцо трапецевидного сечения. Плавное изменение скорости выходного шкива Ш в диапазоне 4-8 достигается путем одновременного раздвигания одной и сближения другой пары конусов. При этом изменяются диаметры рабочей части ведущих Шк1 и ведомых Шк2 конусов.
Сдвоенный торцовый вариатор. В приводах вспомогательных движений применяются одинарные или сдвоенные (рис.2) торцовые вариаторы. Движение от вала I через диск Д1, подвижной ролик Рк и диск Д2 передается валу III. Бесступенчатое изменение скорости вращения вала III в диапазоне 20-25 и выше достигается за счет перемещения ролика Рк вдоль вала II.
Тороидный вариатор. Этот вариатор (рис.3) имеет следующий принцип
работы. На валу свободно насажены тороидные шкивы – ведущий Шт1 и ведомый Шт2 , связанные между собой сферическими дисками Дс . Последние свободно вращаются на поворотны цапфах. При указанном на схеме положении сферических дисков вращение от ведущего троиного шкива на ведомый передается с большего диаметра Dmax меньшему диаметру Dmin . При повороте цапф со сферическими дисками Дс в положение, указанное на схеме штрихами, вращение будет передаваться с меньшего диаметра ведущего шкива большему диаметру ведомого шкива. Бесступенчатое изменение скорости вращения шкива достигается поворотом цапф со сферическими дисками Дс.
Вариатор с наружным и внутренним коническими шкивами. Движе-
ние от вала I (рис.4)через наружный конический шкив Шк.н и шкив Шк.в с
внутренней конической поверхностью передается валу II и далее через передачу Z1-Z2 валу III. Вал I совместно со шкивом Шк.н может перемещаться вдоль образующей своего конуса, благодаря чему рабочий радиус шкива Шк.н меняется от R1 min до R2 max. При этом передаточное отношение вариатора изменяется в диапазоне 3-4.
Торцоконический вариатор. В этом вариаторе (рис.5) вал I с коническим шкивом Шк находится в постоянном контакте с торцовой поверхностью диска Д, который передает вращение валу II и через коническую передачу Z1-Z2 ведомому валу III. Для бесступенчатого изменения скорости вращения вала III предусмотрена возможность перемещения вала I с коническим шкивом Шк вдоль его образующей, что позволяет изменять рабочий радиус конического шкива от R1 min до R2 max.
Сфероконический вариатор. Отличительным признаком этого вариатора (рис.6) является применение шкива Шс со сферической рабочей поверхностью шкива Шк. При изменении угла наклона оси электродвигателя Дэ со сферическим шкивом Шс изменяются рабочие радиусы как сферического, так и конического шкивов, что обеспечивает более широкий диапазон изменения передаточного отношения вариатора в пределах 9-16.
Генератор-двигатель. Система генератор-двигатель (рис.7) состоит из
асинхронного электродвигателя Да , генератора Г, возбудителя В и рабочего электродвигателя Дn постоянного тока. Возбудитель В представляет собой маломощный генератор с самовозбуждением, который предназначен для питания обмотки возбуждения ОВГ генератора Г и обмотки возбуждения ОВД электродвигателя Дn. Диапазон изменения скорости равен 10-16.
Электромашинный усилитель. В станкостроении нашли также широкое применение системы электромашинного управления. За счет изменения сопротивления R1 (рис 8.) в обмотке 1ЭМУ можно менять величину и направление тока. На обмотку 2ЭМУ подается питание с тахогенератора Гт , установленного на валу электродвигателя Дn. Таким образом, в цепи создается напряжение пропорциональное разности потоков в обмотках возбуждения 1ЭМУ и 2ЭМУ. Это напряжение подается на обмотку возбуждения ОВГ генератора. ЭМУ обеспечивает возможность бесступенчатого изменение скорости движения рабочих органов станков в широком диапазоне (400-1000).
Гидравлические приводы. Асинхронный электродвигатель переменного тока Дэ (рис. 9), соединен с гидравлическим насосом Нр. Последний подает масло в гидравлический двигатель Мр, соединенный с рабочими органами станка. Бесступенчатое изменение скорости осуществляется за счет изменения количества масла как подаваемого насосом, так и потребляемого гидравлическим двигателем на каждый его оборот.