 2015-09-07
2015-09-07 2095
2095Траектории спуска выбирают с учетом возможностей, создаваемых характеристиками СА, в пределах ограничений по перегрузкам и тепловым режимам, а также требований самой траектории спуска (заданный маневр, точность посадки). Указанные ограничения влияют на характеристики СА и на программы управления его движением. Рассмотрим эти вопросы применительно к задаче спуска с низких околоземных орбит (высоты 200—500 км).
Характер траекторий определяется прежде всего параметрами СА, основными из которых являются аэродинамическое качество К (см. формулу (3) и баллистический параметр
Px =  (4)
(4)
где m - масса СА.
В расчетах часто используют также параметры:
pY =  (5)
(5)
pM =  (6)
(6)
первый из которых (5) является величиной, производной от К и px, а второй (6) характеризует нагрузку на мидель или крыло.
Приведенные параметры определяют соотношение между гравитационными и аэродинамическими силами и являются мерой эффективности или способности последних создавать в полете ускорения, так как
 =
=  (7)
(7)
 (8)
(8)
Таким образом, возможности формирования траекторий зависят от выбора аэродинамического качества и баллистического параметра, а управление движением - от их изменения в полете.
На траектории влияют и условия входа в атмосферу, под верхней границей которой (высотой входа) понимают высоту начала заметного влияния аэродинамических сил (100—120 км). К этим условиям относят скорость входа (для спуска с орбиты около 7,6 км/с) и уголнаклона траектории, или угол входа, определяемые на указанной высоте.
Маневр на участке спуска может быть осуществлен с помощью изменения лобового сопротивления аппарата (коэффициента сопротивления или эффективной поверхности), но только в плоскости траектории, т. е. по дальности. Использование подъемных сил создает возможность маневра как по дальности, так и в боковом направлении.
В зависимости от аэродинамического качества различают следующие характерные виды спуска:
баллистический — без использования подъемных сил, как правило, без управления по дальности и с большим разбросом точек посадки (около ±300 км);
планирующий — с использованием подъемных сил; обычно под ним подразумевают спуск с аэродинамическим качеством (большим 0,7-1), что создает широкие возможности по маневру и обеспечению точной посадки;
скользящий, или полубаллистический,— это планирующий спуск смалым аэродинамическим качеством (меньшим 0,3-0,5), позволяющим снизить перегрузки и обеспечить достаточно точную посадку, хотя и без широкого маневра; этот вид спуска используется на КК «Союз» и «Аполлон».
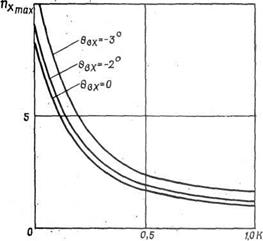
Рисунок 3 - Влияние аэродинамического качества и угла входа на максимальные перегрузки при спуске с орбиты
Перегрузки при спуске - один из основных траекторных параметров - зависят в основном от аэродинамического качества и угла входа. Для снижения перегрузок, как видно из рисунка 3, целесообразно увеличение аэродинамического качества до 0,3-0,5 (его дальнейшее повышение влияет слабо), а угол недолжен превышать 2—3°.
Тепловые потоки, воздействующие на поверхность СА, зависят от аэродинамического качества и угла входа в атмосферу (рисунок 4). Для улучшения тепловых режимов важно, чтобы торможение происходило в верхних слоях атмосферы для максимального снижения скорости до наступления пика теплового потока, Это реализуется при баллистическом спуске за счет увеличения аэродинамического сопротивления и снижения нагрузки на мидель, а для СА с большим аэродинамическим качеством - за счет увеличения угла атаки (роста коэффициентов сопротивления и подъемной силы) и снижения нагрузки на несущую поверхность. При скользящем спуске высокий коэффициент сопротивления обеспечивает тупая форма СА, а угол атаки, несколько снижая этот коэффициент, создает подъемную силу.
 |
Во всех случаях в начальной фазе спуска с точки зрения улучшения тепловых режимов важен не режим максимального качества, а максимально возможный рост коэффициентов сопротивления и подъемной силы или снижение нагрузки на характерную площадь.
Рисунок 4 - Характер влияния аэродинамического качества я угла входа на тепловые потоки (удельный q и интегральный Q):
 (9)
(9)
 (10)
(10)
Переносимость перегрузок при оптимальной позе человека обеспечивается вплоть до значений 25—27 ед. (максимальная по траектории спуска величина со временем действия до 5-10 с), а работоспособность до 15 ед. Для обеспечения относительного комфорта экипажа и уверенного контроля им полета перегрузки не должны превышать 4-6 ед.
Выбор параметров СА определяется прежде всего требованиями по обеспечению переносимости перегрузок, по маневру и точности посадки и по разработке тепловой защиты.
Задача надежного возвращения экипажа на Землю наиболее просто решается путем баллистического спуска с орбиты, при котором перегрузки не превышают 10 ед., а при спасении на участке выведения - 25 ед., т. е. лежат в пределах переносимых значений. Если исходить из обеспечения работоспособности экипажа, аэродинамическое качество должно соответствовать 0,15-0,2 при штатном спуске и 0,3 при аварийном с уровнем перегрузок 4-5 и 15 ед. соответственно. При этом в случае управляемого спуска с орбиты при располагаемом аэродинамическом качестве 0,3 (с запасом на управление) обеспечивается посадка с достаточной точностью (отклонение в пределах десятков километров). Из условий теплообмена в двух названных видах спуска целесообразно снижение баллистического параметра. Увеличение в этих целях поверхности СА (уменьшение нагрузки на мидель) ведет к неоправданным затратам массы. Более рационально повышение коэффициента сопротивления, что прослеживается в проектах всех разработанных кораблей.
В случаях, когда задан специальный маневр на участке спуска, необходимо повышение аэродинамического качества, которое при требовании межвиткового маневра (боковое отклонение 2000-2500 км, например, для посадки в одной точке с трех смежных витков) должно быть около 1,5. В то же время повышение аэродинамического качества, способствуя улучшению переносимости перегрузок и точности посадки, ведет к росту массы тепловой защиты, а при развитых несущих поверхностях и к росту массы конструкции. Это сдерживает выбор аэродинамического качества выше значения, необходимого для решения задач спуска.
Способ управления движением определяется принятым методом регулирования подъемной силы в полете. Балансировочный угол атаки и аэродинамическое качество можно изменять (см. рисунок 2) поперечным смещением центра тяжести за счет передвижения больших масс внутри СА (для «Союза» около 150 кг), что нерационально. При использовании в тех же целях реактивных двигателей непомерно возрастают расходы топлива, а создание аэродинамических рулей эффективно только для крылатых схем.
Широкое распространение получил способ управления путем разворотов СА по крену при постоянном балансировочном угле атаки, не требующий больших управляющих моментов. При нулевом угле крена подъемная сила направлена вверх в плоскости траектории, а при повороте отклоняется в сторону, изменяя вертикальную составляющую, что обеспечивает управление по дальности. Изменение горизонтальной составляющей, включая перевод аппарата с правого на левый крен и наоборот, используется для управления в боковом направлении. Этот способ применяется и в нештатных ситуациях. Так, при отказе системы управления подъемная сила может оказаться направленной вниз, что приведет к недопустимому возрастанию перегрузок, исключить которое можно вращением аппарата по крену (режим закрутки). В этом случае среднее значение подъемной силы равно нулю, т. е. идет баллистический спуск.
Управление при спуске необходимо для того, чтобы движение шло по принятой траектории с заданной точностью. Источниками отклонения траектории от расчётной могут быть ошибки в условиях входа (угол, скорость, координаты), случайные изменения плотности атмосферы и ветровые воздействия, ошибки в определении аэродинамических характеристик и другие факторы. Система управления опирается на измерения текущих траекторных параметров и определяет по ним управляющие воздействия, реализуемые через принятый способ управления (развороты по крену); на точность ее работы влияют инструментальные и методические погрешности.
Схема спуска с малым аэродинамическим качеством, используемая на КК «Союз», который всегда приземляется на территории РФ, начинается с ориентации КК для торможения. В расчетной точке над Атлантическим океаном двигательная установка сообщает КК тормозной импульс 100—120 м/с, после чего дальнейшее движение происходит по переходному эллипсу с углом входа около 1,5° с сохранением ориентации. После разделения КК его СА разворачивается так, чтобы в прогнозируемой точке входа в атмосферу угол атаки соответствовал балансировочному, а угол крена (около 45°) обеспечивал бы расчетное эффективное качество. При появлении аэродинамических сил (перегрузка около 0,04 ед.) начинается управление движением, при этом развороты по крену и демпфирование колебаний по тангажу и рысканью осуществляются с помощью микрореактивных двигателей. Максимальные перегрузки при спуске лежат в диапазоне 3-4 ед., а время полета от входа до высоты 9,5 км (ввод парашюта) составляет около 10 мин.
В нештатных ситуациях предусмотрен переход на баллистический спуск (перегрузки до 9 ед.) путем закрутки СА по крену с угловойскоростью 12,5 град/с. Спускаемый аппарат статически устойчив в круговом смысле и способен прийти к расчетному углу атаки даже при нарушении начальной ориентации.
Контрольные вопросы
1 Понятия «Космический вакуум», «Космическая радиация», «Космическая радиация», «Температура межпланетного пространства».
2 Понятия «Метеорная опасность», «Невесомость» «Перегрузка или коэффициент перегрузки».
3 Какие отсеки КА являются основными?
4 Какие ДУ имеют КА?
5 Какие задачи выполняет и что входит в бортовой комплекс управления
КА?
6 Какое терморегулирование применяют на КА?
7 Какие источники энергии используются на КА?
8 Назначение системы жизнеобеспечения и САС?
9 Каковы задачи спуска и приземления СА?
10 Что входит в аэродинамические характеристики СА?
11 Статическая и динамическая устойчивость СА.
12 Каковы траектории спуска СА?
13 Как выбираются параметры СА в зависимости от траектории спуска?
14 Баллистический, планирующий и скользящий спуски СА.
Литература
1. Советская космонавтика. М.: Машиностроение, 1981.
2. Военно-космические силы. М.: ЦИПК, 1992.
3. Вольский А.Н. Космодром. М.: ВИМО, 1997.
4. На земле и в космосе. Под редакцией И.В.Бармина. М.: Д.С.»Полиграфикс РПК», 2001.
5. Корнеев Н.М., Неустроев В.Н. Генеральный конструктор В.П.Бармин.М,: 1999.
6. Кожухов В.С., Соловьев В.Н. Комплексы наземного оборудования ракетной техники. М.: АСКОНТ, 1988.
7.Козлов В.В. Основы проектирования ракетно-космических комплексов. М.: Издательство ВИКУ им. А.Ф.Можайского, 1999.
8. Горлин С.М. Экспериментальная аэромеханика. М.: 1970.
9. Попов В.Н., Расторгуев Б.С. Вопросы расчета и конструирования специальных сооружений. М.: Стойиздат, 1980.
10. Евсеев И.М. Опережая время. М.: ООО «Биоинформсервис», 1999.
11. Бирюков Г.П., Кобелев В.Н. Основы построения ракетно-космических комплексов. М.: Издательско-типографский центр МАТИ им. К.Э.Циолковского, 2000.
15. Павлюк Ю.С. Баллистическое проектирование ракет. г.Челябинск, Издательство ЧГТУ, 1996год
16. Пенцак И.Н. Теория полёта и конструкция баллистических ракет. М., Машиностроение, 1974, 344 с.
16. Алифанов О.М., Андреев А,Н., Гущин В.Н. и др. Баллистические ракеты и ракеты-носители: Пособие для студентов вузов. Москва, 2004, 512 с.
17. Паничкин Н.И., Слепушкин Ю.В. и др. Конструкция и проектирование космических летательных аппаратов. М., Машиностроение, 1986, 344 с.
18. Оболенский Е.П., Сахаров Б.И., Сибиряков В.А. Прочность летательных аппаратов и их агрегатов. М., Машиностроение, 1995, 504 с.
19. Алатырцев А.А., Алексеев А.И. и др. Инженерный справочник по космической технике.
21. Моссаковский В.И., Макаренков А.Г., и др. Прочность ракетных конструкций, Москва, Высшая школа, 1990, 359 с.
22. Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотных летательных аппаратов /под ред. А.А. Лебедева/ - М.: Машиностроение,
1980 г.
23. Остославский И.В., Стражева И.В. Динамика полета: траектории летательных аппаратов. – М. Машиностроение, 1969 г.
24. Колесников К.С. Динамика ракет. Учебник для вузов – М.: Машиностроение, 1980 г.
25. Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация.- М.: Машиностроение, 1982 г.
26. Лебедев А.А., Красильщиков М.Н., Малышев В.В. Оптимальное управление движением космических аппаратов М: Машиностроение, 1974 г.
27. Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий. / Под ред. М.Н. Красильщикова и Г.Г. Себрякова – М.: ФИЗМАТЛИТ, 2003 г.
28. Помыкаев И.И. Инерциальный метод измерения параметров движения летательных аппаратов – М.: Машиностроение, 1969 г.
29. Балк М.Б. Элементы динамики космического полета. М.: Наука, 1965 г.
30. Бромберг П.В. Теория инерциальных систем навигации – М.: Наука,
1979 г.
31. Васильев А.П., Кудрявцев В.М., Кузнецов В.А. и др. Основы теории и расчета жидкостных ракетных двигателей /Под ред. В.М. Кудрявцева М.: Высш. Школа, 1983г.
32. Добровольский М.В. Жидкостные ракетные двигатели. Основы проектирования / Под ред. Д.А. Ягодникова - М.: Изд-во МГТУ им. Н.Э. Баумана, 2006 г.








