 2015-09-06
2015-09-06 1000
1000Общий вид и кинематическая схема моторизованного ручного инструмента представлена на Рис. 5.2 и Рис. 5.3.
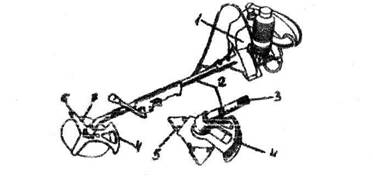
Рис. 5.2. Ручной моторизованный инструмент «Секор-3»:1 - двигатель; 2 - корпус; 3 - вал; 4 - ограждение;5 - пильный диск для травяной растительности; 6 - ограждение диска;7 - пильный диск для деревьев.
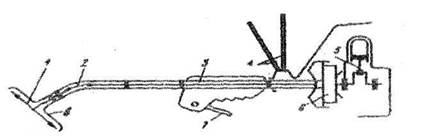
Рис. 5.3 Кинематическая схема: 1 - пильный диск; 2 - гибкий вал; 3 - корпус; 4 - ремень; 5 - двигатель; 6 - муфта сцепления; 7 - рукоятка управления; 8 -защитный кожух.








