 2015-09-06
2015-09-06 346
346До п.3.2.3 Коефіцієнт потужності визначається за формулою:

Щоб надалі мати можливість розділити втрати в сталі статора і механічні, потрібно від потужності  відняти електричні втрати статора 3
відняти електричні втрати статора 3  :
:

Індуктивна складова струму НХ 
Обчислені дані заносять до таблиці 4.4.
За даними таблиці 4.4 будують характеристики НХ: 

Характеристики варто будувати у відносних одиницях, причому за одиничні значення напруги, струму і потужності приймають відповідно номінальну напругу,струм і потужність двигуна.
Крива  має типовий вигляд кривої намагнічування. За цією кривою потрібно визначити коефіцієнт насичення магнітного кола. Механічні втрати і втрати у сталі можуть бути визначені екстраполяцією кривої
має типовий вигляд кривої намагнічування. За цією кривою потрібно визначити коефіцієнт насичення магнітного кола. Механічні втрати і втрати у сталі можуть бути визначені екстраполяцією кривої  на нульову напругу.
на нульову напругу.
Таблиця 3.4 – Визначення параметрів НХ
| № п/п | U0 | I0 | P0 | 3 I20фr1 | рст+рмех | cos 
| 
| ||||||
| В | в.о. | А | в.о. | Вт | в.о. | Вт | в.о. | Вт | в.о. | А | в.о. | ||
Для більш зручної екстраполяції криву втрат варто побудувати у функції квадрата напруги. Внаслідок майже точної квадратичної залежності втрат у сталі від напруги дослідні точки розташовуються на прямій (рисунок 3.2).
|
|
|
Продовживши отриману пряму до перетину з віссю ординат, знаходять значення аО, що дорівнює механічним втратам двигуна та генератора, тому що при напрузі, рівній нулю, потік, а виходить, і втрати в сталі також дорівнюють нулю.
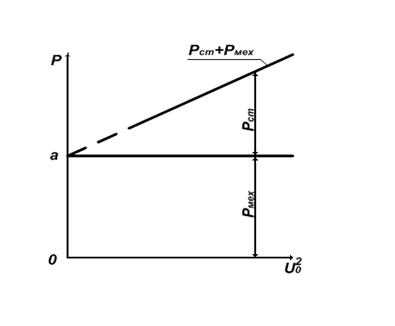
Рисунок 3.2
Якщо з точки а провести пряму, паралельну вісі абсцис, то при заданій напрузі  ордината, укладена між цією прямою і графіком
ордината, укладена між цією прямою і графіком  дасть величину втрат у сталі, а розмір
дасть величину втрат у сталі, а розмір  втрат механічних визначається ординатою аО.
втрат механічних визначається ординатою аО.
Якщо під час дослідження навантажувальний генератор не був механічно роз’єднаний із випробуваним двигуном, знайдене буде містити в собі також і механічні втрати навантажувального генератора.
До п. 3.2.4 Після визначення коефіцієнта потужності знаходять параметри КЗ:
а) повний опір КЗ при з’єднанні обмоток зіркою:

або трикутником:
б) активні та індуктивні опори:
Обчислені дані КЗ заносять до таблиці 3.5, на підставі яких будуються характеристики КЗ.
Таблиця 3.5 – Визначення параметрів КЗ
| № п/п | Uк | Iк | Pк | Zк | rк | xк | cos 
| |||
| В | в.о. | А | в.о. | Вт | в.о. | Ом | Ом | Ом | ||
Вигляд характеристик багато в чому залежить від форми і розмірів пазів статора і ротора. Якщо двигун має відкриті або напіввідкриті пази, можна вважати,що потоки розсіювання статора і ротора розподіляються в середовищі з постійною магнітною проникністю і тому індуктивний опір  При постійній частоті і заданій температурі маємо
При постійній частоті і заданій температурі маємо  Звідси випливає, що
Звідси випливає, що  і залежність
і залежність  є пряма, що виходить з початку координат. Відповідно:
є пряма, що виходить з початку координат. Відповідно:
|
|
|
а крива  практично є парабола.
практично є парабола.
Якщо характеристика практично має вигляд прямої,що виходить з початку координатної системи,струм КЗ при номінальній напрузі:

При номінальній напрузі потужність КЗ:
До п. 3.2.5 За розрахункові значення напруги  на затискачах двигуна і струму
на затискачах двигуна і струму  статора приймають середнє арифметичне трьох виміряних значень. Споживана потужність, що підводиться до двигуна, визначається як алгебраїчна сума показань ватметрів, помножена на ціну поділок шкали ватметра
статора приймають середнє арифметичне трьох виміряних значень. Споживана потужність, що підводиться до двигуна, визначається як алгебраїчна сума показань ватметрів, помножена на ціну поділок шкали ватметра 
Коефіцієнт потужності визначається за формулою  ковзання – відповідно до викладеного вище.
ковзання – відповідно до викладеного вище.
Одним із найважливіших результатів опрацювання даних проведеного дослідження навантаження є визначення ККД двигуна методом окремих втрат, що рекомендується стандартами для двигунів із ККД більш 10%.
Спосіб підрахунку ККД ґрунтується на таких підставах. Включений у мережу двигун споживає під навантаженням потужність  . У статорі частина цієї потужності витрачається на покриття втрат у сталі, електричні втрати в обмотках статора і на додаткові втрати. Інша потужність (електромагнітна) магнітним полем передається ротору. Тут відбувається її подальше зменшення за рахунок електричних втрат в обмотках ротора, додаткових втрат у роторі. Залишок потужності перетвориться у механічну потужність, від якої варто відняти механічні втрати двигуна. Інша механічна потужність передається на вал і є корисною потужністю двигуна.
. У статорі частина цієї потужності витрачається на покриття втрат у сталі, електричні втрати в обмотках статора і на додаткові втрати. Інша потужність (електромагнітна) магнітним полем передається ротору. Тут відбувається її подальше зменшення за рахунок електричних втрат в обмотках ротора, додаткових втрат у роторі. Залишок потужності перетвориться у механічну потужність, від якої варто відняти механічні втрати двигуна. Інша механічна потужність передається на вал і є корисною потужністю двигуна.
Окремі втрати визначаються таким чином:
а) втрати в обмотці статора визначаються з виразу:
де І  - фазний струм двигуна; r
- фазний струм двигуна; r  - опір однієї фази статора при розрахунковій робочій температурі 75°С;
- опір однієї фази статора при розрахунковій робочій температурі 75°С;
б) втрати в сталі р  і механічні р
і механічні р  визначаються окремо за даними досліду
визначаються окремо за даними досліду
НХ для напруги, що мала місце при знятті робочих характеристик. При цьому
приймається, що в межах зміни навантажень від НХ до номінальної справедлива
рівність:
р + р = const.
Електромагнітна потужність визначається як різниця між підведеною потужністю і втратами в статорі:
Р  = Р
= Р  - р
- р  - р ;
- р ;
в) втрати в обмотці ротора визначаються за виміряними під час дослідження
навантаження значеннями ковзання й електромагнітної потужності:
p  = Р S/100,
= Р S/100,
де S – ковзання,%;
г) додаткові втрати при номінальному режимі можуть бути прийняті р  =0,005 Р
=0,005 Р  ,
,
а при іншому режимі, відмінному від номінального,  = 0,005P1n(I1/I1N)2
= 0,005P1n(I1/I1N)2
Таблиця 3.6 - Робочі характеристики АД
| № п/п | U1 | I1 | P1 | cosj | S | n | PM1 | PM2 | PД | 
| Р2 | М2 | 
| ||||
| В | в.о. | А | в.о. | Вт | в.о. | в.о. | % | Об/хв | в.о. | Вт | Вт | Вт | Вт | Вт | Нм | % | |
Корисна (що віддається) потужність двигуна визначається як різниця між підведеною потужністю і сумою всіх вказаних втрат:

ККД двигуна:

Частота обертання ротора n=n1(1-S),
де n1 - синхронна частота обертання; S – ковзання, в.о.
Корисний момент на валу двигуна:


де P2 - вимірюється у ватах; n – в обертах на хвилину. Результати опрацювання до с лідних даних заносять до таблиці 3.6
За даними таблиці 3.6 будують робочі характеристики. При їх аналізі варто врахувати, що в асинхронному двигуні живлення до обмотки ротора не підводиться і вона в робочому режимі замкнена накоротко. З ростом навантаження на валу двигун повинен розвити більший електромагнітний момент:
 .
.
Оскільки при U1 = const магнітний потік змінюється незначно, то збільшення моменту відбувається за рахунок зростання струму ротора, що можливо тільки приз збільшенні індукованої ЕРС у роторі. Враховуючи те, що при  = const частота обертання ротора повинна зменшуватися, це означає збільшення відносної швидкості поля стосовно ротора, а значить, індукування більшої ЕРС.
= const частота обертання ротора повинна зменшуватися, це означає збільшення відносної швидкості поля стосовно ротора, а значить, індукування більшої ЕРС.
|
|
|
Питання для самоконтролю
1. Що таке ковзання асинхронної машини?
2. При яких ковзаннях асинхронна машина працює в режимі двигуна?
3. За яким методом визначається ковзання? Суттєвість методу.
4. Як здійснюються режими НХ асинхронної машини при нерухомому та обертаючомуся роторі?
5. Чим відрізняється режим НХ нерухомої асинхронної машини від режиму НХ трансформатора?
6. З якою метою в обмотку фазного ротора двигуна при пуску вмикають реостат?
7. У чому полягає різниця і що спільного у характеристиках КЗ асинхронної машини і трансформатора?
8. Поясніть характеристики НХ cos j0, P0, I0.
9. Поясніть характеристики КЗ cos jk, Pk, Ik.
10. Чому при збільшенні навантаження на валу асинхронної машини її частота обертання зменшується?
11. Як пояснити залежність cos j = f (P2)?
12. Чому з ростом навантаження двигуна збільшуються споживання з мережі струму I1 і потужності P1?
13. Яким чином визначається корисна потужність P2 на валу асинхронного двигуна?
14. Чому нехтують втратами в сталі ротора асинхронного двигуна в номінальному режимі?
15. Чому в асинхронному двигуні створюється обертовий момент, а в трансформаторі – не створюється?
Лабораторна робота №4. ДОСЛІДЖЕННЯ АСИНХРОННОЇ МАШИНИ З КОРОТКОЗАМКНЕНИМ РОТОРОМ У РЕЖИМАХ ДВИГУНА ТА
ГЕНЕРАТОРА
Мета роботи – провести дослідження, одержати параметри і характеристики асинхронного двигуна з короткозамкненим ротором у режимах двигуна та
генератора.








