 2015-09-06
2015-09-06 2833
2833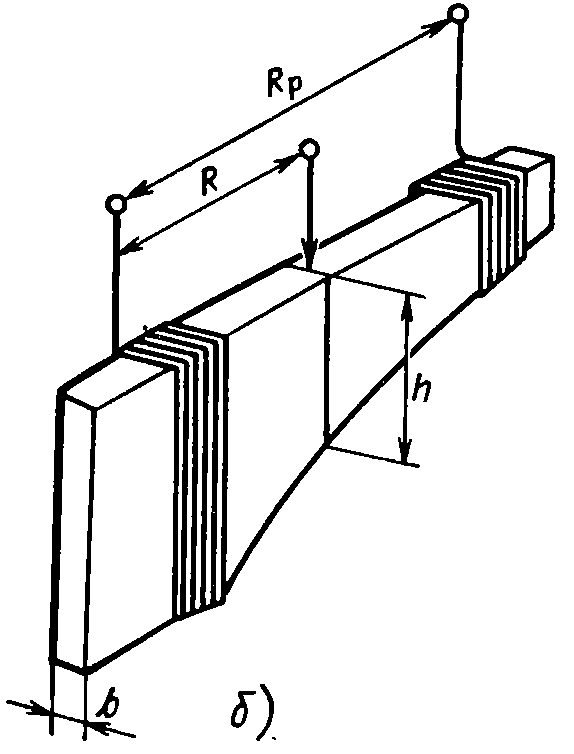 |
| Рис. 10.1 Резистивный преобразователь |
Резистивных преобразователь (РП) – это прецизионный реостат, движок которого перемещается под действием измерительной величины. Входной величиной преобразователя является угловое или линейное перемещение движка, а выходной – изменение его сопротивления. Простейший реостат представляет собой каркас, изготовленный из изоляционного материала, с нанесенным токопроводящим покрытием или намотанной тонкой проволокой, с высоким удельным сопротивлением, по которому (ой) перемещается токосъемный движок.
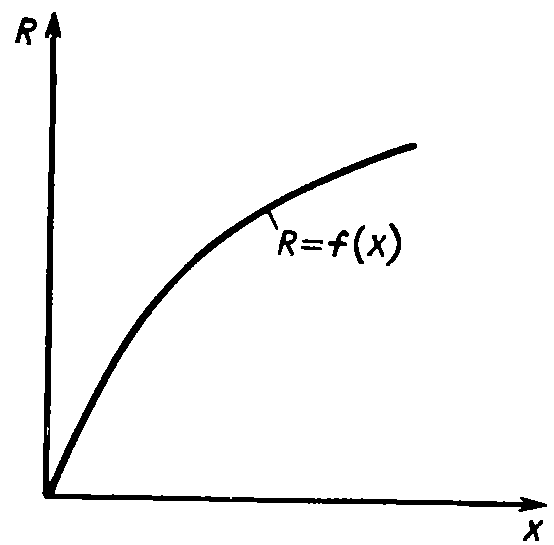
В измерительной технике используют реостатные преобразователи как с линейной, так и с нелинейной функцией преобразователя (рис. 10.2). Для нелинейной функции преобразователя  каркасы с переменной высотой.
каркасы с переменной высотой.
 | 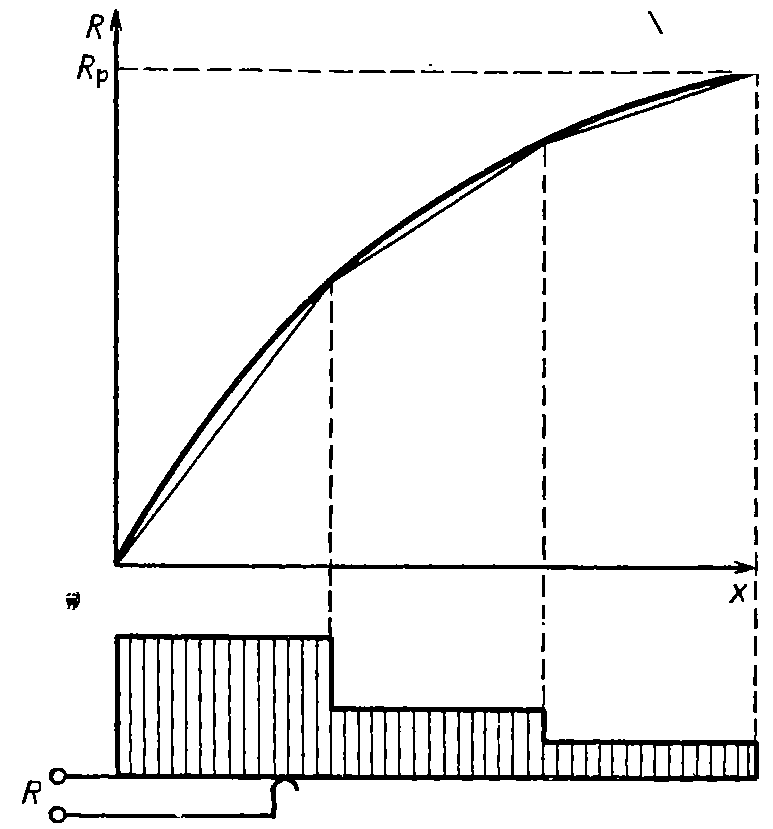 |
| Рис. 10.2 Функция преобразования |
Для упрощения изготовления каркаса используют кусочно-линейную аппроксимацию заданной нелинейной функции преобразователя. Для каждого интервала перемещения движка х, на котором аппроксимирующая функция линейна, высота каркаса постоянна. Каркас преобразователя получается ступенчатым, Число ступеней равно числу интервалов в кусочно-линейной аппроксимации.
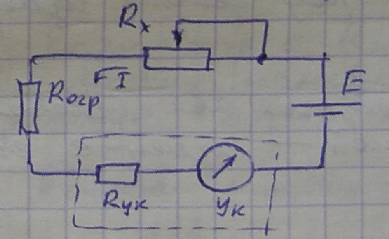 |
| Рис. 10.3 Делитель тока |
Простейшая схема с последовательным включением (делитель тока) резистивного первичного преобразователя  , источником питания Е и указателем УК с внутренним сопротивлением
, источником питания Е и указателем УК с внутренним сопротивлением  показана на
показана на
рис. 10.3.
При изменении сопротивления  изменяется величина тока I в цепи и, следовательно, угол поворота стрелки указателя.
изменяется величина тока I в цепи и, следовательно, угол поворота стрелки указателя.  – служит для ограничения тока в цепи при
– служит для ограничения тока в цепи при  .
.
Достоинство: – простота реализации схемы.
Недостатки:
– зависимость показаний от нестабильности напряжения источника питания Е.
– вследствие изменения тока в цепи изменяется и степень нагрева элементов схемы и сопротивление, что приводит к погрешности.
– невозможность установки на 0.
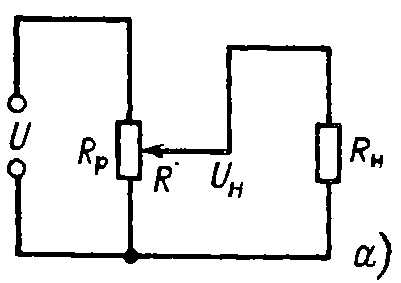 |
| Рис. 10.4 Делитель напряжения |
Возможно включение резистивного преобразователя в схему параллельно источнику питания (рис. 10.4). Тогда напряжение питания от источника U подается на кротчайшие выводы резистивного ПИП. Выходное напряжение U вых подается на нагрузку R н с движка потенциометра с сопротивлением R и с одного из крайних выводов. Если сопротивление R н>> R, то током в R н можно пренебречь и преобразователь работает в режиме холостого хода. Если резистивный перобразователь имеет пропорциональную функцию преобразования, то напряжение U вых пропорционально перемещению движка R.
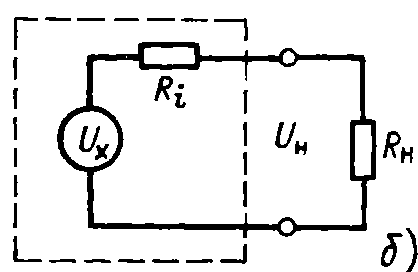 |
| Рис. 10.5 Схема активного двухполюсника |
Если R н соизмеримо с сопротивлением преобразователя R, то исследуемую цепь можно представить в качестве активного 2-х полюсника (рис. 10.5), имеющего внутреннее сопротивление R i и напряжение U xx.
Тогда зависимость U вых от  для различных коэффициентов в нагрузке показано на рис. 10.6.
для различных коэффициентов в нагрузке показано на рис. 10.6.
При малом значении  напряжение U вых изменяется пропорционально . С увеличением коэффициента нагрузки появляется нелинейность U вых, причем чем больше
напряжение U вых изменяется пропорционально . С увеличением коэффициента нагрузки появляется нелинейность U вых, причем чем больше  , тем больше нелинейность.
, тем больше нелинейность.
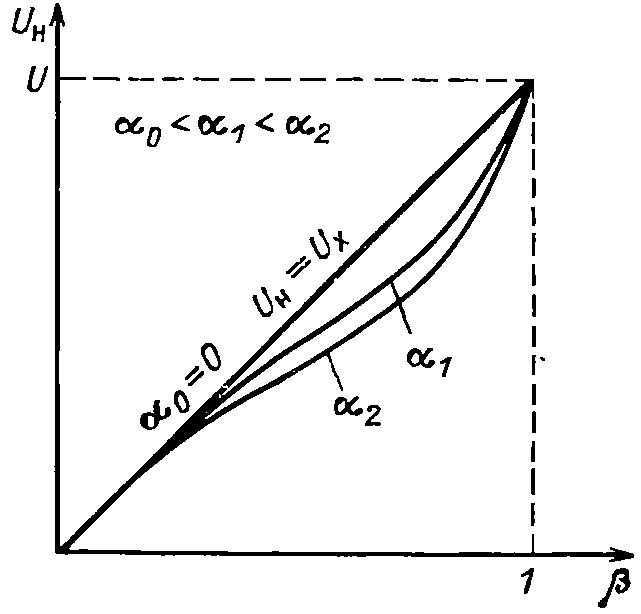 |
| Рис. 10.6 Зависимость U вых от β |
Достоинства потенциометрических схем:
+ исключается температурная погрешность от разогрева элементов схемы;
+ в режиме холостого хода изменение внешней температуры не меняет распределение напряжений и, соответственно, погрешность отсутствует.
Недостатки:
- нелинейность характеристики выходного сигнала при R н соизмеримой с R.
- зависимость показаний от напряжения питания.
- наличие выходного сигнала при отсутствии входного.
Мостовая схема включения РП. Устройством, предназначенным для измерения параметров электрических цепей (R,C,L) методом сравнения, является измерительный мост.
Сравнение измеряемой величины с образцовой мерой может осуществляться на постоянном и переменном токе. Мост переменного тока может включать в себя не только резисторы R, но и конденсаторы С и индуктивности L, т.е. сопротивление может иметь комплексный характер.
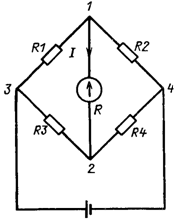 |
| Рис. 10.7. Мостовая схема включения РП. |
Мостовая схема включения содержит 4 резистора (R 1, R 2, R 3, R 4,), называемыми плечами моста, которые соединяется в кольцевой замкнутый контур.
Точки соединения плеч моста (точки 1, 2, 3, 4) называются вершинами. Цепи, соединяющие противоположные вершины моста (вершины 1-2 и 3-4) называются диагоналями. Т.е. в первую диагональ 3-4 подключен источник питания, во вторую 1-2 – измерительный прибор.
В случае, когда  ток в диагонали измерительного прибора равен нулю и такой мост называется уравновешенным.
ток в диагонали измерительного прибора равен нулю и такой мост называется уравновешенным.
В большинстве мост симметричный. Различают 2 вида симметрии:
R х =R 2и R 3 =R 4
R х =R 3и R 2 =R 4.
Резистивные преобразователи могут включаться как в один, два и четыре плеча. Если сопротивление нагрузки велико (режим холостого хода) то выходное напряжение моста равно:

где U пит= Е — напряжение питания.
Чаще всего применяют равноплечие мосты R 1= R 2= R 3= R 4.
Мостовая схема является дифференциальной схемой. Следовательно, в ней компенсируется аддитивная погрешность. С применением этой цепи возможно построение прибора по дифференциальной схеме 1 и 2-го типов.
Чувствительность дифференциальной схемы 2-го типа в 2 раза выше чувствительности дифференциальной схемы 1 типа.
Когда сопротивление нагрузки R н неравно бесконечности – выходное напряжение и чувствительность меньше расчетных значений.
При неравенстве сопротивлений плеч моста применяется дополнительный регулировочный резистор.
Достоинства:
+ возможность включения 2-х и более резистивных преобразователей – получить высокую чувствительность;
+ компенсируются аддитивные погрешности.
Недостатки:
– нелинейность при сопротивлении нагрузки R н соизмеримой с сопротивлениями плеч моста.
– при нестабильности питания моста возможна мультипликативная погрешность.

