 2015-09-06
2015-09-06 1217
1217Индуктивные преобразователи представляют собой катушку индуктивности, полное сопротивление которой изменяется при взаимном относительном перемещении магнитопровода, т.е. движение сердечника относительно катушки или наоборот.
Различают 2 группы индуктивных преобразователей: изменяющиеся индуктивностью и изменяющиеся активным сопротивлением.
Индуктивные первичные преобразователи работают только на переменном токе и могут быть включены по всем схемам включения резистивных первичных преобразователей. Комплексное сопротивление Z:
где R пр- сопротивление обмотки;
ωL - реактивное сопротивление; L – индуктивность; ω - частота.
Достоинства: простота.
Недостатки:
– преобразователь является электромагнитом, который воздействует на контролируемый техпроцесс и величина воздействия не линейна, зависит от перемещения якоря или сердечника;
– аддитивная погрешность вследствие изменения активного сопротивления под действием температуры. Она может быть весьма значительной;
– сила притяжения якоря или сердечника может быть соизмерима с усилительными усилиями.
Этих недостатков лишены индуктивные преобразователи включенные в дифференциальные цепи второго типа.
Дифференциальный индуктивный преобразователь состоит из двух одинарных индуктивных преобразователей имеющие одинаковые характеристики и имеющие общий подвижный элемент (сердечник).
Мостовых схемы включения индуктивных преобразователей (рис. 10.12)
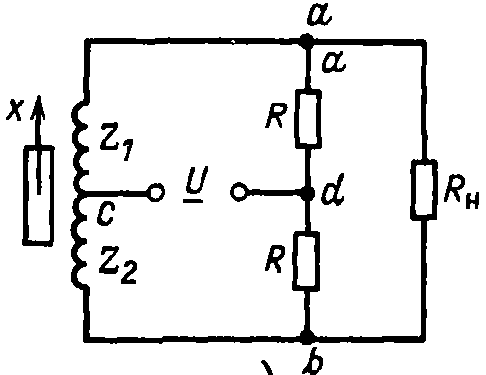 |   При перемещении якоря одна индуктивность увеличивается, а другая уменьшается. Сопротивления других плеч могут быть активными (R 1, R 2), так и реактивными (когда включены катушки, L рис. 2 и 3) При перемещении якоря одна индуктивность увеличивается, а другая уменьшается. Сопротивления других плеч могут быть активными (R 1, R 2), так и реактивными (когда включены катушки, L рис. 2 и 3) |
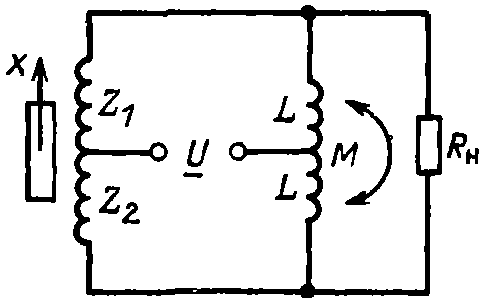 | Секция двухобмоточного дросселя. Магнитная система преобразователя и катушки L выполнены из одного материала для компенсации изменения магнитного поля при изменении напряжения питания. |
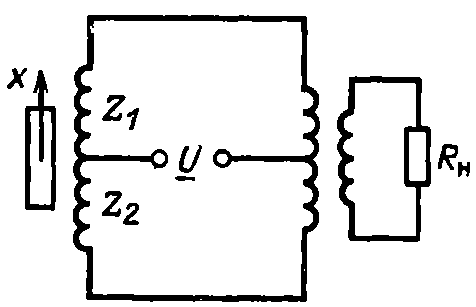 Рис. 10.12 Мостовые схемы включения индуктивных преобразователей Рис. 10.12 Мостовые схемы включения индуктивных преобразователей | Трансформаторная схема с 2-х секционной обмоткой. Он позволяет согласовать сопротивление преобразователя сопротивлением нагрузки и получить гальваническую развязку цепи питания преобразователя от цепи нагрузки. |
В идеальной схеме при среднем положении сердечника (якоря) U вых=0. Однако из-за разброса параметров плеч моста это равенство не выполняется. Поэтому необходима балансировка. Балансировка моста переменного тока осуществляется с раздельной регулировкой действительной и мнимой составляющей его входного напряжения. Мнимую часть регулируют перемещением якоря, действительную - при помощи R 1 и R 2.
Достоинства:
+ выходная характеристика преобразователя близка к линейной.
+ чувствительность в 2 раза выше, чем у одинарных индуктивных преобразователей.
+ уменьшена сила притяжения якоря.
Недостатки: Возможны аддитивные и мультипликативные погрешности вследствие действия температуры.

