 2015-10-13
2015-10-13 1069
1069МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ТУЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Институт высокоточных систем им. В.П. Грязева
Кафедра «Электроэнергетика»
По выполнению курсовой работы
Учебной дисциплины (модуля)
«ИНФОРМАТИКА»
Уровень профессионального образования:
высшее образование – бакалавриат
Направление (специальность) подготовки:
13.03.02 «Электроэнергетика и электротехника»
Профиль (специализация) подготовки:
«Электрооборудование и электрохозяйства предприятий»
Форма обучения: очная
Вариант 5
Выполнил: студент группы 121241
Кифель С.П.
Проверил: Горелов Ю.И.
Тула 2015 г.
Содержание
1 Введение. 3
2 Исходные данные к пояснительной записке. 4
4 Исследование переходной функции, амплитудно-фазовых и логарифмических частотных характеристик типовых звеньев с помощью системы MATLAB.. 9
5 Исследование основных характеристик апериодического звена первого порядка 12
6 Исследование основных характеристик реального дифференцирующего звена 15
7 Исследование основных характеристик колебательного звена. 19
8 Заключение. 24
9 Список литературы.. 25
Введение
Целью курсовой работы является получение студентами практических навыков по анализу линейных систем автоматического управления, представленных в виде структурных динамических схем, на персональных компьютерах с использованием системы MATLAB - Simulink.
Курсовая работа посвещена исследованию переходной функции, амплитудно-фазовых и логарифмических частотных характеристик апериодического, реального дифференцирующего и колебательного звеньев с помощью системы MATLAB, и приложения MATLAB - системы имитационного моделирования Simulink.
Исходные данные к пояснительной записке
В данной работе исследуются основные временные и частотные характеристики апериодического, реального дифференцирующего и колебательного звеньев, т.к. характеристики безынерционного и интегрирующего звеньев очевидны, а реализация операции идеального дифференцирования средствами цифровой вычислительной техники невозможна.
При этом с помощью апериодического звена 1-го порядка описывается двигатель постоянного тока, реального дифференцирующего звена -дифференцирующая RC-цепь, колебательного звена - акселерометр для измерения угловых ускорений. Схемы исследуемых звеньев приведены на рисунке 2.1.
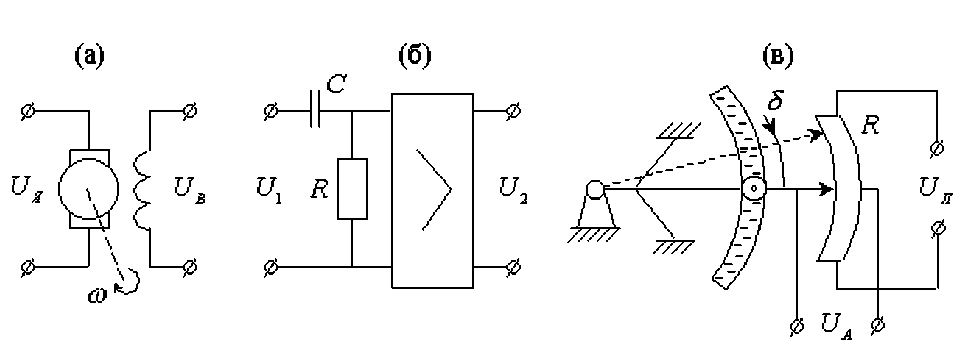
Рисунок 2.1 - Исследуемые типовые звенья САУ: а - двигатель постоянного тока; б - дифференцирующая цепь; в - акселерометр угловых ускорений
Исходные данные для моделирования указанных звеньев приведены в таблице 2.1 и 2.2.
Таблица 2.1
| Номер варианта | Двигатель постоянного тока | RC- цепь | ||||||
 |  |  |  |  |  |  |  | |
| 1,4 | 0,25 | 0,15 | 0,27 | 0,0015 |
Таблица 2.2
| Номер варианта | Акселерометр | ||||||
 |  |  |  |  | |||
| 10,0 | 0,15 | 0,37 | 1,10 | 2,5 | 2,50 | ||








