 2015-10-14
2015-10-14 444
444| № точки | Горизонтальный угол между направлением на точку и изначально заданным направлением (линией тахеометрического хода), β i | Проложе-ние, di | Превыше-ние, hi | Описание точки |
После окончания полевых работ производится увязка хода, которая завершается определением координат, а также отметок точек в заданной СК.
После этого становится возможным приступить к конвертации цилиндрических координат в прямоугольные. Заострим внимание на переводе плановых координат, то есть полярных (β, d) в прямоугольные (x, y).
Во время съемки каждая станция становится началом локальной СК и чтобы перейти к общей СК произвольно задаётся её начало на любой (для определённости первой) станции. Присвоив ей координаты, например (500, 500), а оси направив на север и восток, находятся координаты Xj и Yj для каждой из станций. После расчёта и увязки хода становятся известны координаты всех станций хода в общей прямоугольной СК.
После этого с помощью Microsoft Excel находятся координаты всех точек в общей СК. Рассмотрим этот процесс на примере одной точки.
Допустим, точка снята со станции II (рис. 9.1), известны координаты этой станции (X II, Y II), ось локальной полярной СК совпадает с линией II-III, а полюс СК находится на станции II. Координаты i -ой точки в локальной полярной СК характеризуются углом β i и длинной отрезка di. Необходимо найти координаты точки в общей СК, т.е. (xi, yi). Из геометрии следует, что:
xi = X II + Δ xi;
yi = Y II + Δ yi;
Δ xi = di cos(Азимут + αII + β i);
Δ yi = di sin(Азимут + αII + β i);
xi = X II + di sin(Азимут + αII + β i);
yi = Y II + di cos(Азимут + αII + β i).
Как уже было отмечено выше, преобразование координат производится в программе Microsoft Excel, но так как функции sin и cos в этой программе работают с радианами, необходимо преобразовать углы из градусов, секунд, минут в радианы. Например, угол n ° m ¢ k ² приводится к исчислению в радианах следующим образом:
n ° = pn/ 180;
m ¢ = pm /10800;
k ² = pk/ 648000;
n ° m ¢ k ² = p (n+m /60 +k /3600 )/ 180.
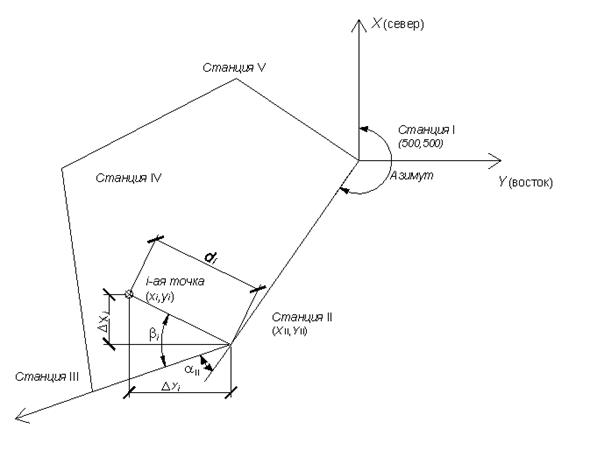
Рис. 9.1. Схема
В табл. 9.2 приведён ориентировочный состав столбцов при конвертации координат.








