 2015-10-13
2015-10-13 820
820САР устойчива тогда и только тогда, если годограф ее характеристического полинома степени  начинается на положительной действительной полуоси и при изменении частоты от нуля до бесконечности последовательно проходит на комплексной плоскости против часовой стрелки квадрантов, и в -м квадранте уходит на бесконечность.
начинается на положительной действительной полуоси и при изменении частоты от нуля до бесконечности последовательно проходит на комплексной плоскости против часовой стрелки квадрантов, и в -м квадранте уходит на бесконечность.
Достоинства. Этот критерий удобен своей наглядностью. Так, если кривая проходит вблизи начала координат, то САУ находится вблизи границы устойчивости и наоборот. Этим критерием удобно пользоваться, если известно уравнение замкнутой САУ.
4. Как формулируется критерий устойчивости Найквиста? В чем его достоинства?
Критерий Найквиста – позволяет исследовать устойчивость замкнутой системы (всей САУ) по частотной характеристике разомкнутой системы.
Если разомкнутая система устойчива, то для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф устойчивой разомкнутой системы «не охватывал» точку с координатами  .
.
Если разомкнутая система неустойчива и имеет  неустойчивых («правых») корней, тогда для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф Найквиста разомкнутой системы охватил точку
неустойчивых («правых») корней, тогда для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф Найквиста разомкнутой системы охватил точку  раз.
раз.
Достоинство. Критерий Найквиста очень нагляден. Он позволяет не только выявить, устойчива ли САУ, но и, в случае, если она неустойчива, наметить меры по достижению устойчивости.
Возникает вопрос: зачем нужен критерий Найквиста, если с помощью современных программных средств не представляет труда найти корни характеристического полинома и по ним судить об устойчивости системы?
Дело в том, что критерий Найквиста, в отличие от критериев Гурвица и Михайлова, позволяет анализировать устойчивость замкнутой САУ и со звеном запаздывания в контуре.
Наличие звена постоянного запаздывания ухудшает устойчивость системы.
5. Почему звено запаздывания ухудшает устойчивость системы?
6. В чем смысл энергетического баланса при анализе устойчивости систем?
Тема 11. Качество САУ. Точность. Астатизм.
1. Какими основными показателями оценивается качество САР?
Качество САР это понятие, характеризующее способность САР правильно выполнять возложенные на нее задачи. Основные, принципиальные с точки зрения ТАУ, характеристики качества работы САР это ее быстродействие и точность. И оценивать их целесообразно отдельно для установившегося и переходного режимов работы САР.
Качество работы линейных непрерывных САР характеризуется пятью основными чис-ловыми показателями.
2. Как вычисляются коэффициенты ошибок в установившемся режиме? В чем их физический смысл? Как он связан с понятием астатизма?
Для установившегося режима работы прямые показатели это коэффициенты ошибок:
 ,
,  и
и  - коэффициент ошибки по положению, скорости и ускорению соответственно.
- коэффициент ошибки по положению, скорости и ускорению соответственно.
Ошибка регулирования (по заданию) определяется из соотношения:
 , где
, где  .
.
Если  то говорят, что система обладает астатизмом
то говорят, что система обладает астатизмом  -го порядка.
-го порядка.
Если  , то говорят просто, что система обладает астатизмом.
, то говорят просто, что система обладает астатизмом.
3. Почему система может быть астатической по заданию и статической по возмущению?
4. Перечислить показатели качества переходного режима и раскрыть их физический смысл.
Для переходного режима прямые показатели качества работы это:
- время регулирования  , т.е. это время от начала переходного процесса до момента, когда отклонение управляемой величины от ее установившегося значения не превышает некоторого наперед заданного предела, обычно принимаемого равным 5%;
, т.е. это время от начала переходного процесса до момента, когда отклонение управляемой величины от ее установившегося значения не превышает некоторого наперед заданного предела, обычно принимаемого равным 5%;
- перерегулирование  – это максимальное отклонение управляемой величины от ее
– это максимальное отклонение управляемой величины от ее
установившегося значения, выраженное в относительных единицах:  .
.
К косвенным показателям относятся:
- запас устойчивости по амплитуде (допускается 4-10 раз или 12-20 дБ);
- запас устойчивости по фазе (допускается  );
);
- корневые критерии (колебательность, степень затухания - оценивают по расположению корней на комплексной плоскости);
- резонансная частота  - частота, на которой возможно максимальное усиление замкнутой САР входного гармонического сигнала;
- частота, на которой возможно максимальное усиление замкнутой САР входного гармонического сигнала;
- полоса пропускания САР - это интервал частот от  до
до  , на котором выполняется условие:
, на котором выполняется условие:  . Если полоса широкая (высока
. Если полоса широкая (высока  ), то система будет воспроизводить высокочастотные помехи;
), то система будет воспроизводить высокочастотные помехи;
- частота среза  – частота, на которой АЧХ замкнутой САУ равен единице. По ней можно косвенно судить о длительности переходного процесса
– частота, на которой АЧХ замкнутой САУ равен единице. По ней можно косвенно судить о длительности переходного процесса  .
.
- интегральные показатели переходного процесса (специального вида функционалы качества:  ;
;  ;
;  ;
;  и пр.).
и пр.).
Тема 12. Синтез САУ. Оптимизация параметров САУ.
1. В чем состоит задача синтеза САУ?
С точки зрения ТАУ целью синтеза является формирование закона управления, при котором достигаются заданные показатели устойчивости и качества системы. Закон управления – это зависимость между отклонением регулирующего органа и сигналом ошибки. Объект управления и исполнительные органы образуют, так называемую, неизменяемую часть системы, параметры которой являются исходной информацией при синтезе. Передаточную функцию неизменяемой части обозначим как  . Конечная цель синтеза заключается в определении параметров специальных корректирующих устройств, которые, будучи добавлены к неизменяемой части системы, придадут ей необходимые свойства.
. Конечная цель синтеза заключается в определении параметров специальных корректирующих устройств, которые, будучи добавлены к неизменяемой части системы, придадут ей необходимые свойства.
2. Какие существуют способы коррекции САУ?
Существуют три способа коррекции САУ.
1) Последовательная коррекция:  .
.
 – передаточная функция последовательного корректирующего устройства.
– передаточная функция последовательного корректирующего устройства.
2) Параллельная коррекция:  .
.
 – передаточная функция параллельного корректирующего устройства.
– передаточная функция параллельного корректирующего устройства.
3) Коррекция в виде обратных связей:  .
.
 – передаточная функция звена корректирующей обратной связи.
– передаточная функция звена корректирующей обратной связи.
Приравнивая полученные передаточные функции, можно выразить передаточную функцию любого вида коррекции через другие.
Наиболее просто коррекция САУ осуществляется изменением коэффициента передачи прямой цепи. Пусть система является статической и ее передаточная функция в разомкнутом состоянии имеет вид:  . Тогда для передаточной функции замкнутой системы по ошибке получим:
. Тогда для передаточной функции замкнутой системы по ошибке получим:  .
.
Типичным последовательным корректирующим устройством является ПИД-регулятор.
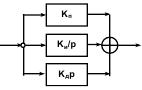 Передаточная функция ПИД-регулятора:
Передаточная функция ПИД-регулятора:  ,
,
где  ,
,  ,
,  - коэффициенты усиления соответственно пропорционального, интегрального и дифференцирующего звеньев.
- коэффициенты усиления соответственно пропорционального, интегрального и дифференцирующего звеньев.
Влияние  : - позволяет изменить коэффициент усиления системы, тем самым уменьшить установившуюся ошибку:
: - позволяет изменить коэффициент усиления системы, тем самым уменьшить установившуюся ошибку:  .
.
Влияние  : - повышение порядка астатизма на 1.
: - повышение порядка астатизма на 1.
Влияние : - не влияет на установившуюся ошибку, так как  не зависит от :
не зависит от :
 при
при  .
.
3. Как выбрать оптимальные параметры ПИД-регулятора?
Выбор оптимальных (по различным критериям) параметров ПИД-регулятора целесообразно выполнять с помощью оптимизатора, встроенного в ПК МВТУ.
Тема 13. Нелинейные САУ. Фазовые траектории.
1. В каком случае САУ считается нелинейной?
Динамическая система считается нелинейной, если она содержит хотя бы один нелинейный элемент или нелинейное звено.
В системах автоматического управления различают два вида нелинейностей: статические и динамические.
Статические нелинейности – это нелинейности статических характеристик. Выходная переменная статических нелинейных звеньев в каждый момент времени зависит только от значений входной переменной в тот же момент времени и не зависит от того, как эта входная переменная изменялась до рассматриваемого момента времени. Таким образом, вход и выход нелинейного звена связаны между собой нелинейной статической характеристикой  .
.
Динамические нелинейности – это нелинейности дифференциальных уравнений, описывающих звено, например,  .
.
2. Перечислить основные особенности нелинейных систем. Чем они обусловлены?
Главные особенности этих систем вытекают из их неподчинения принципу суперпозиции:
1. Колебания переходного процесса в нелинейных системах могут отличаться от входного гармонического сигнала, как по форме, так и по частоте, например, если  .
.
2. В нелинейных системах аппарат частотных характеристик не подходит. Здесь частотные характеристики существенно зависят от амплитуды входного сигнала.
3. В нелинейных системах условия устойчивости зависят от величины внешнего воздействия: система устойчива при одних значениях воздействий и неустойчива при других его значениях. Для некоторых нелинейных систем, имеющих зону нечувствительности, наблюдается континиум состояний равновесия. Таким образом, в нелинейных системах говорят только об устойчивости конкретного состояния равновесия – устойчиво оно или нет.
4. В нелинейных системах могут существовать собственные особые движения, получившие название автоколебаний. Автоколебания – это устойчивые собственные колебания, возникающие из-за нелинейных свойств системы при особых условиях.
3. В чем отличие соединения нелинейных звеньев от соединения линейных звеньев?








