 2020-06-29
2020-06-29 525
525
Функцией положения механизма называется зависимость координаты выходного звена от обобщенных координат механизма.
Перемещения, скорости и ускорения звеньев и точек механизма является функциями перемещений, скоростей и ускорений звеньев механизма, принятых за ведущие. Число ведущих звеньев механизма должно быть равно числу степеней подвижности механизма или, что то же самое, числу обобщенных координат механизма.
Рассмотрим, в какой форме могут быть заданы законы ведущих звеньев. Эти законы называют функциями перемещений, скоростей и ускорений.
Функция перемещений может быть задана в аналитической форме в виде соответствующей функции, связывающей перемещение ведущего звена со временем (рис.2).
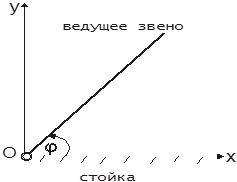

Рис.2
Если ведущее звено входит во вращательную пару со стойкой, то задается функция φ=φ (t), где: φ - угол поворота ведущего звена относительно неподвижной системы координат ХОY, связанной со стойкой, а t - время.
Если ведущее звено входит в поступательную пару, то задается функция s=s (t), где s - перемещение произвольно выбранной точки А ведущего звена относительно неподвижной системы координат, связанной со стойкой, а t - время.
Функции φ=φ (t) и s=s (t) могут быть также заданы графически в виде кривых, где по осям ординат отложены углы поворота φ или перемещения s в некоторых выбранных масштабах  и
и  , а по осям абсцисс время t в выбранном масштабе
, а по осям абсцисс время t в выбранном масштабе  (рис.3).
(рис.3).

Рис.3
φ0 = 0; φi - φ0 = · в;
Соответственно время ti, за которое ведущее звено повернулось на угол φi равно:
ti - t0 =  · a;
· a;
Если закон движения ведущего звена задан в виде функций скоростей ω=ω (t) или v=v (t), то переход от функций скоростей к функциям перемещений может быть осуществлен путем вычисления интегралов:
кинематический анализ механизм ускорение
 и
и  ;
;
где: φ0, s0, t0 - угол, перемещение и время, соответствующие начальному положению ведущего звена.
Если закон движения ведущего звена задан в виде функций ускорений ε=ε (t) и ω=ω (t), то переход к функциям скоростей осуществляется путем вычисления интегралов:
 и
и 
где: ω0, v0, t0 - угловая скорость, линейная скорость и время, соответствующие начальному положению ведущего звена.








