 2020-07-12
2020-07-12 925
925
Датчики для измерения виброакустических колебаний объекта
Математическая модель вибродатчика
Практически всегда первичный преобразователь исходного колебательного движения в электрический сигнал измеряет только один параметр, и переход к другому параметру осуществляется путем дифференцирования либо интегрирования измеряемого сигнала аппаратурными средствами или расчетными методами.
Вибродатчик инерционного действия, сейсмический датчик - это датчик на основе механической системы второго порядка (масса-пружина), в котором смещение массы относительно корпуса датчика пропорционально измеряемому параметру вибрации [84].
Уравнение движения вибродатчика инерционного действия имеет вид:
 , (3.1)
, (3.1)
где: M – масса инерционного элемента; h – коэффициент демпфирования; k – коэффициент упругости; x – относительное перемещение массы; S (t) – виброперемещение объекта контроля.
В зависимости от расположения области рабочих частот датчика относительно резонансной различают три режима его работы: режимы измерения виброперемещения, виброскорости и виброускорения.
В режиме измерения виброперемещения датчик работает в области частот, лежащих выше собственной частоты датчика.
В режиме измерения виброскорости датчик работает в области частот, лежащих в области задемпфированной собственной частоты датчика.
В режиме измерения виброускорения датчик работает в области частот, лежащих ниже собственной частоты датчика.
Кинематический принцип измерения вибрации заключается в измерении параметров вибрации исследуемого объекта относительно какого-либо другого объекта, принятого за неподвижный.
Динамический принцип измерения вибрации заключается в создании в датчике, воспринимающем вибрацию, искусственной неподвижной точки, относительно которой измеряются параметры вибрации исследуемого объекта.
Динамический принцип измерения реализуется в вибродатчиках инерционного действия, в которых инерционная масса и упругий элемент, соединяющий массу с основанием датчика, крепятся на объекте контроля, причем в силу инерционности масса отстает от колебаний объекта и, начиная с некоторой частоты, остается неподвижным в пространстве, позволяя измерять абсолютную вибрацию объекта.
Акселерометр
Пьезоэлектрический акселерометр – это датчик ускорения, в котором сейсмическая масса закреплена на пьезоэлементе или прижата к нему. Пьезоэлемент создает электрический заряд, пропорциональный инерционной силе и, следовательно, перемещению сейсмической массы.
Пьезоакселерометры на сегодняшний день являются стандартными датчиками, применяемыми для измерений вибраций машин. Они могут иметь различные конструкции [22]. Нагляднее всего принцип их действия можно описать на примере компрессионной конструкции (рис. 3.1). Сейсмическая масса крепится к основанию осевым болтом, который прижимает кольцевую пружину. Между массой и основанием вставляется пьезоэлемент. При перемещении акселерометра вверх или вниз, на сейсмическую массу воздействует сила F(t). Это единственная сила, действующая на массу m, и поэтому она пропорциональна ускорению последней, т. е. ускорению всей системы:
 (3.2)
(3.2)
Когда на пьезоэлемент действует сила, на его поверхностях появляется электрический заряд. Масса воздействует на чувствительный элемент с такой же по величине и противоположной по направлению силой. Так как заряд Q (t)и напряжение U (t)на пьезоэлектрическом элементе прямо пропорциональны величине этой силы, то на обкладках чувствительного элемента появляется заряд, пропорциональный ускорению:
 (3.3)
(3.3)
где d – пьезомодуль керамики (dmax ≈3.10-10К л /Н); Q –заряд; K –коэффициента преобразования потоку.
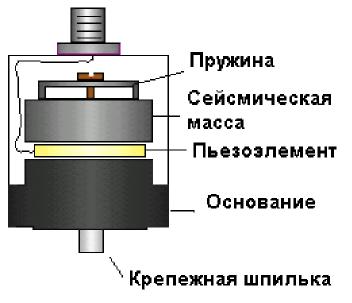

Рис. 3.1. Разрез датчика Рис. 3.2. Современный акселерометр
Пьезоакселерометры имеют чувствительность не только в основном (главном) направлении, но и преобразуют сигнал в поперечном направлении.
Поперечная чувствительность вибродатчика - это относительная величина, равная отношению максимальной величины сигнала на входе датчика от вибрации, действующей в направлении, перпендикулярном рабочей оси, к сигналу от вибрации того же уровня, действующего вдоль рабочей оси.
Данные о поперечной чувствительности датчика представляются в виде диаграммы направленности либо указанием максимального значения поперечной чувствительности, определенного по диаграмме направленности. Поперечную чувствительность датчика рекомендуется определять на базовой частоте или одной из частот, лежащей в рабочем диапазоне частот датчика, с учетом характеристик вибростенда.
Кроме того, датчик обладает деформационной чувствительностью, которая возникает из-за изгибных деформаций объекта в месте крепления акселерометра, что вызывает деформацию пьезопластин и возникновение на выходе датчика паразитного сигнала.
Для коэффициента преобразования по напряжению пьезоэлектрического датчика вибрации справедлива следующая формула:
 (3.4)
(3.4)
а для коэффициента преобразования по заряду:
K = dQ, (3.5)
где d – пьезомодуль; Q – заряд; C - емкость чувствительного элемента.
На коэффициент преобразования пьезоэлектрического датчика, включенного на вход усилителя напряжения, влияет длина соединительного кабеля (активное и емкостное сопротивления) Сдвиговые и изгибные конструкции пьезодатчиков принципиально обладают наибольшей чувствительностью и наименьшей поперечной чувствительностью.
Пьезоэлемент может быть выполнен из кварца или синтетических керамических пьезоматериалов, которые работают достаточно надежно, причем даже при более высоких температурах, чем позволяет кварц. Если температура пьезоэлемента повышается и достигает так называемой температуры Кюри, то его пьезоэлектрические свойства утрачиваются. В этом случае датчик считается неисправным и не подлежащим ремонту.
Среди других конструкций одной из наиболее популярных является так называемый бендер (от англ. bend – изгиб), в котором используется консольно закрепленный пьезоэлемент с расположенным на нем небольшим грузом.
Пьезоакселерометры обладают чрезвычайно большой линейностью по амплитуде, поэтому у них очень большой динамический диапазон. Нижний предел ускорения, который они могут воспринимать, определяется только электрическим шумом электроники, а высшие уровни ограничены только пределом разрушения самого пьезоэлемента. Диапазон допустимых амплитуд может охватывать восемь порядков, или 160 дБ!
При правильном обслуживании пьезоакселерометр сохраняет стабильность и калибровку в течение длительного времени. Акселерометр можно повредить двумя способами: подвергнуть его воздействию избыточной температуры или уронить его на твердую поверхность. Общим правилом является ежегодная поверка акселерометров.
Частотный диапазон акселерометров очень широк и может простираться от очень низких частот до десятков килогерц. Высокочастотная характеристика ограничена резонансной частотой системы сейсмическая масса – пьезоэлемент. Ориентировочно, акселерометр считается применимым для измерений на частотах, не превышающих 1/3 его собственной частоты (при более жестких требованиях к линейности верхнюю границу устанавливают равной около 1/5 собственной частоты). Выше этой величины сигнал будет усиливаться, однако его можно использовать, если сделать соответствующую поправку на изменение чувствительности.
Некоторые из применяемых сегодня в промышленности акселерометров принадлежат к типу ICP, т. е. имеют встроенный микропредусилитель. Этот предусилитель питается постоянным током по сигнальному проводу, и поэтому для него не требуются дополнительные кабели. Устройство, к которому подключается такой акселерометр, должно обеспечивать соответствующее питание датчика. Из-за наличия предусилителя ICP-акселерометры имеют спад частотной характеристики в области низких частот. Обычно у большинства распространенных акселерометров общего назначения этот спад начинается приблизительно с 1 Гц. Для измерений в области очень низких частот используют специальные модели, допускающие измерения вплоть до 0,1 Гц.
Для усиления сигнала пьезоэлектрического датчика часто применяют дифференциальные усилители. Преимущество дифференциального согласующего усилителя перед недифференциальным заключается в том, что он компенсирует синфазные помехи.
Помимо пьезоэлектрических производятся также так называемые пьезорезистивные датчики, использующие эффект пьезорезистивности – изменения электрического сопротивления некоторых кристаллов под действием приложенных механических сил. Пьезорезистивные датчики позволяют производить измерения вплоть до 0 Гц.
Для получения сигнала, пропорционального смещению, скорости или ускорению, вводят операции интегрирования сигнала с акселерометра. При однократном интегрировании сигнал пропорционален скорости, при двойном интегрировании – смещению. Вид преобразования и, соответственно, частотный диапазон определяются характером исследуемых процессов. В низкочастотном диапазоне (0 – 500 Гц) колебательные процессы целесообразно измерять в режиме измерения перемещения, в диапазоне средних частот (500 - 2000 Гц) – в режиме измерения скорости, а в высокочастотном диапазоне (2 - 20 кГц и выше) – в режиме измерения ускорения.
Датчик скорости
Датчик скорости (велосиметр) был одним из первых вибропреобразователей. Он состоит из проволочной катушки, внутри которой находится магнит на пружинах (pис. 3.3). Когда корпус датчика приходит в движение, магнит по инерции стремится остаться в покое. Вследствие относительного перемещения катушки и магнита, в первой возникает индукционный ток, который пропорционален скорости перемещения корпуса датчика.
Напряжение на выходе датчика пропорционально не только скорости V
относительного перемещения катушки и магнита, но и длине проводника в катушке:
UВЫХ=-BlV= -Blx(t), (3.6)
где B –магнитная индукция, Тл; l – общая длина проводника, находящегося в поле, м.
Таким образом, это устройство вырабатывает электрический сигнал, прямо пропорциональный виброскорости. Он является самогенерирующим и не требует дополнительной согласующей электроники, а также обладает сравнительно невысоким выходным электрическим импедансом, что делает его слабо чувствительным к наводкам.
|
|

Рис. 3.3. Датчик скорости (велосиметр)
Наряду с перечисленными достоинствами, датчик скорости обладает и большим количеством недостатков. Он достаточно тяжел, сложен и дорогостоящ. Кроме того, его частотная характеристика охватывает диапазон от 10 до 1000 Гц. Пружина и магнит образуют систему с собственной частотой порядка 10 Гц. Этот резонанс демпфируют. На практике демпфирование чувствительно к температуре из-за чего амплитудно-фазочастотная характеристика датчика также зависит от температуры.








