 2020-08-05
2020-08-05 398
398Конструкция межколесного симметричного шестеренчатого конического дифференциала приведена на рис. 5.15. Неразъемный корпус 1 такого дифференциала осью (рис. 5.15, а) или крестовиной (рис. 5.15, б) соединен с сателлитами 2, которые в свою очередь соединены с полуосевыми шестернями 3. Сателлиты и полуосевые шестерни исполняются прямозубыми. Число зубьев сателлитов и полуосевых шестерен может быть четным и нечетным, но для обеспечения сборки должно обеспечиваться условие:
 = k, (5.21)
= k, (5.21)
где Zш – число зубьев полуосевой шестерни;
nс – число сателлитов;
k – целое число.
Для уменьшения трения в таких дифференциалах часто трущиеся поверхности разъединяют антифрикционными шайбами 4. Торцовые поверхности сателлитов и внутреннюю поверхность корпуса делают сферической формы, что способствует лучшему центрированию и более точному зацеплению конической зубчатой передачи.
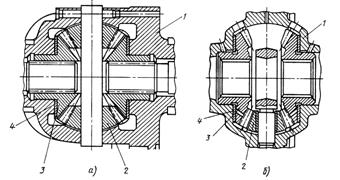
Рис. 5.15. Конструкция межколесного симметричного шестеренчатого дифференциала: а – с двумя сателлитами; б – с четырьмя сателлитами
Конструкция несимметричного межосевого дифференциала автомобиля КАМАЗ-4310 приведена на рис. 5.16. Такой дифференциал распределяет момент между передним мостом и задней тележкой в отношении, равном отношению диаметра начальной окружности солнечной шестерни к диаметру начальной окружности эпициклического колеса. Привод к переднему мосту постоянно включен, а дифференциал имеет принудительную блокировку, осуществляемую с помощью пневматического привода. Крутящий момент от ведущего вала 1 через шестерни промежуточного вала передается на корпус дифференциала 2 и далее к ведомым валам 4.

Рис. 5.16. Конструкция раздаточной коробки с несимметричным межосевым дифференциалом автомобиля КАМАЗ-4310
5.2.3. Кинематические и динамические связи в дифференциале
Дифференциалы, применяемые в трансмиссии автомобилей, представляют собой трехзвенный планетарный механизм с двумя степенями свободы. Дифференциал включает в себя: корпус с осью или крестовиной в качестве водила, сателлиты (два или четыре) и две полуосевые шестерни (рис. 5.13).
Рассмотрим кинематические связи. Уравнение кинематики дифференциала получают путем остановки водила. Тогда внутреннее передаточное число дифференциала определится
p =  =
=  , (5.22)
, (5.22)
где z1 и z2 –число зубьев полуосевых шестерен;
ω1, ω2, ωд – угловые скорости полуосевых шестерен и корпуса дифференциала.
Проведя преобразование уравнения (5.22), получим уравнение кинематики дифференциала:
ω1 - pω2 = (1- p)ωд. (5.23)
Если внутренне передаточное число (или кинематический параметр) p = -1, т.е. z1 = z2, то дифференциал симметричный (знак «-» указывает, что при остановке водила полуосевые шестерни вращаются в разные стороны). Если кинематический параметр p ≠ 1, то дифференциал несимметричный. При подстановке в уравнение (5.23) кинематического параметра p = -1 получим кинематическое уравнение для симметричного дифференциала:
ω1 + ω2 = 2ωд. (5.24)
Рассмотрим силовые соотношения. Из условия равновесия внешних моментов, приложенных к дифференциалу, следует:
M1 + M2 = Mд, (5.25)
где M1, M2 и Мд – моменты на полуосях и корпусе дифференциала.
Из условия равенства суммы мощностей на полуосях и мощности на корпусе дифференциала за вычетом мощности потерь на трение (N1 + N2) = (Nд – Nтр), используя уравнение кинематики ω1 - pω2 = (1- p)ωд, можно записать для симметричного дифференциала:
M1ω1 + M2ω2 = Mд 0,5(ω1 + ω2) - Nтр. (5.26)
Решая совместно (5.25) и (5.26) при условии ω1 > ω2 (полуось, передающая M1 - забегающая; полуось, передающая M2 – отстающая) момент на отстающей полуоси равен:
M1(от) = 0,5 (Mд + Mтр); (5.27)
момент на забегающей полуоси равен:
M2(заб) = 0,5 (Mд - Mтр). (5.28)
В уравнениях (5.27) и (5.28) Mтр - общий момент трения в дифференциале, который может быть получен из соотношения:
Mтр =  . (5.29)
. (5.29)
Коэффициент блокировки дифференциала представляют в виде отношения момента трения к моменту на коробке дифференциала, т.е. kб =  . При таком определении коэффициента блокировки он изменяется в диапазоне kб = 0…1,0: kб = 0, если в дифференциале полностью отсутствует внутреннее трение; kб = 1,0 – при полной блокировке дифференциала.
. При таком определении коэффициента блокировки он изменяется в диапазоне kб = 0…1,0: kб = 0, если в дифференциале полностью отсутствует внутреннее трение; kб = 1,0 – при полной блокировке дифференциала.
Нередко коэффициент блокировки дифференциала представляют в виде отношения момента на отстающем валу к моменту на забегающем валу:
 =
=  . (5.30)
. (5.30)
В зависимости от типа дифференциала коэффициент блокировки в таком представлении изменяется в диапазоне: = 1,0…∞: = 1,0 при Mот = Mзаб; = ∞ при Mзаб = 0.
Симметричный межколесный и межосевой дифференциалы существенно снижают проходимость автомобиля при попадании одного колеса (или моста) в условие малого сцепления колес с опорной поверхностью. Рассмотрим движение ведущего моста в условиях не одинакового сцепления под левым и правым колесами (рис. 5.17): под левым колесом с минимальным коэффициентом сцепления φmin, под правым колесом с максимальным коэффициентом сцепления φmax.

Рис. 5.17. Схема к анализу влияния дифференциала на проходимость
Касательные реакции на левом колесе будет составлять Rxлев = Rzл φmin; касательная реакция на правом колесе при симметричном дифференциале не может быть больше, чем Rxправ = Rzп φmin. Тогда суммарная реакция ∑ Rx = 2 Rz φmin. Может иметь место такое значение φmin, что движение автомобиля будет невозможно: одно колесо буксует, второе стоит на месте.
При блокировке дифференциала касательная реакция на левом колесе Rxлев = Rzл φmin; касательная реакция на правом колесе Rxправ = Rzп φmax; суммарная реакция ∑ Rx = Rz (φmin + φmax). В этом случае суммарная реакция значительно выше.
Наличие повышенного внутреннего трения в дифференциале позволяет улучшить проходимость за счет увеличения момента на отстающем колесе. Преобразуем уравнения (5.27) и (5.28), для чего вынесем за скобки Mд:
M1(от) = 0,5 Mд (1+  ) = 0,5 Mд (1+ kб); (5.27*)
) = 0,5 Mд (1+ kб); (5.27*)
M2(заб) = 0,5 Mд(1 -  ) = 0,5 Mд (1- kб). (5.28*)
) = 0,5 Mд (1- kб). (5.28*)
Определим оптимальный коэффициент блокировки дифференциала для рассмотренных выше условий (рис. 5.17), полагая, что моменты на левом и правом колесах равны:
Mлев = Rz φminrд; (5.31)
Mправ = Rz φmaxrд, (5.32)
где rд – динамический радиус колеса.
Тогда максимальный коэффициент блокировки получим отношением:
 =
=  =
=  =
=  . (5.33)
. (5.33)
При предельных значениях коэффициента сцепления под правым колесом φmax = 0,8 и под левым колесом φmin = 0,1 коэффициент блокировки требуется не более 8,0. Считается, что для повышения проходимости автомобиля иметь коэффициент блокировки дифференциала в пределах = 4…5.








