 2014-02-04
2014-02-04 538
538Т.к. основной причиной отклоняющей регулируемую величину от требуемого значения регулирования явл-ся всякого рода возмущения, то во второй половине XIX века возникла идея, что для компенсации вредного влияния, какого-либо возмущения необходимо изменить это возмущение и в зависимости от рез-та измерения осуществить регулирующее воздействие, обеспечивающее изменение регулируемой величины по требуемому з-ну.
Для технической реализации данного принципа в автоматический регулятор должны входить эл-ты:
1. устройство для измерения возмущения, т.е. чувствительный эл-нт.
2. устройство для создания регулирующего воздействия на объект регулирования, которая наз-ся исполнительным эл-ом.
3. промежуточные эл-ты, назначение которых, преобразование входящего сигнала от чувствительного эл-та и выходящий сигнал для исполнительного эл-та.
Структурно это выглядит так:
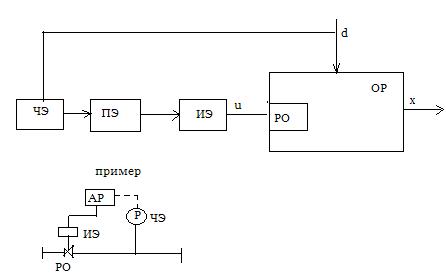 ИЭ – исполнительный эл-нт.
ИЭ – исполнительный эл-нт.
ЧЭ – чувствительный эл-нт.
ПЭ – преобразующий эл-нт.
АР – автономный регулятор.
Основные недостатки сис-м автоматического регулирования, работающих по принципу возмущения закл-ся:
Во-первых – что в этих сис-ах инвариантность (независимость) регулируемой величины, обеспечивается лишь возмущающему воздействию, которое измеряется чувствительным эл-ом регулятора. На практике, в качестве этого возмущения всегда выбирается одно из основных возмущения.
Очевидно, что наличие других возмущений, не контролируемых регулятором, приводит к тому, что регулируемоя величина значительно отличается от требуемого закона ее изменения, следовательно, задача регулирования не выполняется.
Создания отдельных регуляторов по каждому возмущающему воздействию, приводит к усложнению сис-мы автоматического регулирования и часто к их несогласованому действию. Кроме того, далеко не каждое возмущение м.б. измерено.
Во-вторых – инвариантность по отношению к возмущению, измеряемую чувствительным эл-ом. В рассматриваемых сис-ах автоматическое регулирование обеспечивается только в том случае, когда строго осуществляется соответствие параметров регулятора и объекта расчетным значениям. Изменение этих пар-ров вследствие старения этого оборудования, влияние внешних условий и других причин, приводят в этих сис-ах к отклонению регулируемой величины от заданного значения.
Эти 2 недостатка в сис-ах автоматического регулирования, работающих по возмущению, обусловлены тем обстоятельством, что регулируемая величина никак не измеряется и не контролируется, вследствие чего регулирующее воздействие не зависит от регулируемой величины. Сама сис-ма в этом случае имеет разомкнутый контур передачи воздействия. Вследствие указанных недостатков сис-мы автоматического регулирования с разомкнутым контуром самостоятельно для сложных объектов практически не используется.
Тем не менее, к преимуществам данных сис-м следует отнести их простоту, вследствие чего они используются для более простых задач автоматизации для решения. Для автоматизации, контроля, блокировки и защит пуска и останова оборудования.








