 2014-02-02
2014-02-02 794
794Прямая позиционная кинематическая задача
Определение линейных координат точек на ЗУМ и ориентации СК ЗУМ относительно базовой СК (определение углов Эйлера) при заданных значениях координат шарниров и заданных параметрах звеньев ИМ носит название прямой позиционной кинематической задачи.
Решение прямой позиционной задачи выражается формулами
n
tn(0)(0) = t0n tn(n)(n) + S t0j (nj (1-sj)qj + lj),
j =1
где
n
t0n = П tk-1 k
k=1
Прямая позиционная кинематическая задача всегда имееет решение и притом единственное. Место прямой задачи в управлении МР - РИСУНОК, ИЛЛЮСТРИРУЮЩИЙ КОНТУРНОЕ УПРАВЛЕНИЕ
Определение координат сочленений по заданным линейным координатам ЗУМ и углам его ориентации относительно базовой СК при известных параметрах звеньев ИМ носит название обратной кинематической задачи о положении ИМ или обратной позиционной кинематической задачи (сокращенно, ОКЗ).
В общей постановке для многих ИМ обратная позиционная кинематическая задача может иметь несколько решений, бечсисленное множество решений или не иметь ни одного решения.
|
|
|
Первый случай связан с тем, что одному и тому же положению и ориентации ЗУМ относительно базовой СК может соответствовать несколько разных наборов значений координта шарниров.
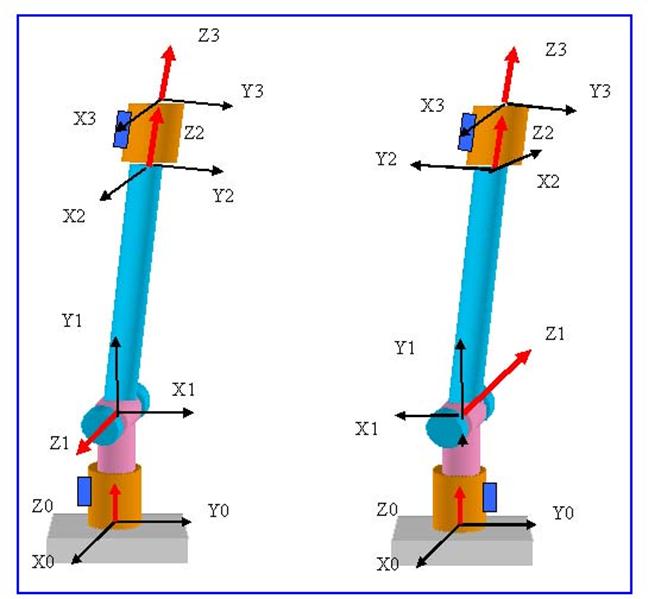
Рисунок иллюстрирует один из таких случаев. Одному и тому же положению и ориентации ЗУМ изображенного на этом рисунке ИМ соответствуют 2 набора значений координат шарниров:
q1 = 0, q2 = -30 град., q3 = 0 град. (на рисунке слева)
и
q1 = 180 град, q2 = +30 град., q3 = 180 град. (на рисунке справа)


Второй случай соответствует определённым конфигурациям кинематической цепи. Для изображенногго на вышеприведенном рисунке ИМ это случай соответствует случаю, когда все звенья как бы вытянуты с линию.
Третий случай связан с ограничениями рабочей зоны вследствие конструктивных ограничений возможных значений координат сочленений и геометрических параметров звеньев ИМ.
Для обеспечения единственности решения ОКЗ применяют специальные меры.
Траектории перемещения ЗУМ предварительно планируют (ТСУ) так, чтобы исключить выход шарниров на ограничения. При этом также исключают попадание в зоны бесчисленного множества решений.
Для обеспечения единственности решения ОКЗ (в «неоднозначном» случае) в рассмотрение вводятся дополнительные параметры (индексы конфигурации кинематической цепи), позволяющие однозначно определить значения координат шарниров. Выбор этих параметров зависит от вида кинематической схемы ИМ и алгоритма решения ОКЗ.
Для изображенного на рисунке ИМ в качестве такового удобно использовать значение величины Ks, заданной нижеследующим выражением
|
|
|
Ks = sign (Z1 · (Z3 х Z0)),
где
Z1, Z3, Z0 - единичные векторы в направлении осей Z СК1, СК3 и СК0, соответственно,
· - символ скалярного, а х - символ векторного произвеления векторов.
Для рассматриваемого ИМ в положении, изображенном на рисунке 1 слева Ks = 1. а в положении справа, Ks = -1.
Введение в рассмотрение индекса конфигурации Ks удобно проиллюстрировать графически. Так, в случае Ks = 1 при увеличении значения кординаты q2 ЗУМ приближается к линии, проведенной вдоль вертикальной оси (плечо находится как бы "впереди" по ходу движения ЗУМ). В случае Ks = -1 при увеличении значения кординаты q2 ЗУМ удаляется от вертикальной линии (плечо находится как бы "сзади" по ходу движения ЗУМ).
ПРИМЕР решения ОКЗ.
Рассмотрим 3-звенный ИМ на рис.1.
Будем считать известными углы ориентации (Pitch, Yaw, Roll) осей этой СК3 относительно базовой СК (СК0).
Pitch = -30 град,
Yaw = Roll = 0.
Будем считать также заданным значение индекса конфигурации Ks:
Ks = 1.
По формулам п. получим значения матрицы τ 03 . В нашем случае роль СК {xyz} играет СК0, а СК {uvw} – СК3.
τ03 = τ xyz, uvw (ось u, угол Pitch) τ xyz, uvw (ось v`, угол Yaw) τ xyz, uvw (ось w``, угол Roll)
τ 03 = 1 0 0
0 √3/2 ½
0-1/2 √3/2
Последний столбец этой матрицы (обозначим его Z3(0)) есть вектор Z3, заданный в проекциях на оси СК0, т.е. Z3(0).
Z3(0)= (0 1/2 √3/2)T.
Зная Z3, вычислим вектор вектор Z1:
Z1 = Ks (Z3 х Z0)/|(Z3 х Z0)|.
В координатной форме последнее выражение записывается так
Z1(0) = Ks λ(Z3(0)) Z0(0) /|(Z3 х Z0)|= - Ks λ(Z0(0)) Z3(0) /|(Z3 х Z0)|.
где
λ(Z3) - матрица векторного произведения, составленная из элементов вектора Z3 = (x y z)T:
λ(Z3) = 0 -z y
z 0 –x
-y x 0
Z0(0) = (0 0 1)T.
Z1(0) = - (+1) 0 -1 0
1 0 0
0 0 0 (0 ½ √3/2)T = - (- ½ 0 0)T / (1/2) = (1 0 0)T.
Вычислим угол q1:
q1 = Arctg (sin q1 / cos q1)
cos q1 = X0(0) · Z1(0) = 1,
(X0(0) - единичный вектор в направлении оси X СК0 в проекциях на оси этой же СК; X0(0) = (1 0 0)T.
sin q1 = Z0(0) · λ (X0(0)) Z1(0) = (0 0 1) 0 0 0
0 0-1
01 0 (0 0 1)T = (0 0 1) (0-1 0)T = 0.
Отсюда
q1 = 0.
Вычислим угол q3:
q3 = Arctg (sin q3 / cos q3)
cos q3 = X3(0) · Z1(0).
X3(0) - единичный вектор в направлении оси X СК3 в проекциях на оси СК0; этот вектор - первый столбец матрицы τ 03:
X3(0) = (1 0 0)T.
сos q3 = X3(0) · Z1(0) = (1 0 0) (1 0 0)T = 1.
sin q3 = Z3(0) · (λ (Z1(0)) х X3(0)) = (0 1/2 √3/2) 0 -1 0
1 0 0
0 0 0 (100)T = 0.
Отсюда
q3 = 0.
Вычислим угол q2.
q2 = Arctg (sin q2 / cos q2)
cos q3 = Z0(0) · Z3(0) = (001) (0 ½ √3/2)T = √3/2.
sin q3 = Z1(0) · (λ (Z0(0)) Z3(0)) = (1 0 0) 0-1 0
1 0 0
0 0 0 (01/2√3/2)T = (1 0 0) (-1/2 0 0)T = -1/2.
q2 = -30 град.
Отметим, что в общем случае решение ОКЗ требует задания помимо углов ориентации, координат точки t3(0)(0) начала СК3. Однако в данном случае в силу ограниченности числа степеней свободы ИМ, достаточно задать только параметры ориентации. В данном примере решение ОКЗ можно получить, задав только линейные кординаты ЗУМ. Последовательность вычислений при этом останется прежней с той лишь разницей, что вектор Z3(0) следует вычислить как единичный вектор в направлении линии,связывающей начала 1-й и 3-й СК.








