 2014-02-02
2014-02-02 2227
2227Поисковые адаптивные системы управления
Адаптивная настройка систем управления
Особенности настройки систем регулирования при вводе их в действие и во время эксплуатации
Место процедуры настройки при разработке, вводе в действии и эксплуатации систем управления
Оптимизация настройки систем управления
1. Качество управления в замкнутой системе определяется главным образом, качеством настройки регулятора. На рис.1. приведены кривые изменения отклонения Dx регулируемой величины Х во времени при использовании одного и того же, но различно настроенного регулятора.
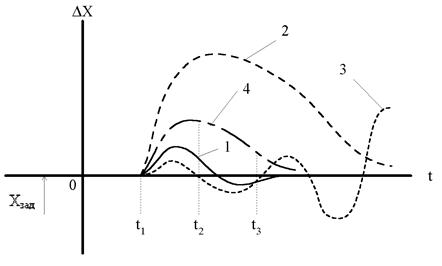
Рис. 1. Зависимость отклонения регулируемой величины от настройки регулятора.
Очевидно, удовлетворительной следует считать настройку 1, поскольку здесь как максимальное отклонение, так и длительность процесса регулирования существенно меньше, чем при ручном регулировании (кривая 4). Настройка 2 не может быть признана удовлетворительной, вследствие большего отклонения регулируемой величины. И совершенно не приемлемой должна считаться настройка 3, т.к. процесс регулирования величины Х имеет характер расходящихся колебаний и ведет к неустойчивой работе системы регулирования. Физически появление расходящихся колебаний объясняется наличием инерции и запаздывания, с которыми изменение выходного сигнала U(t) регулятора приводит к изменению регулируемой величины Х. Это обстоятельство требует от регулятора умения предсказывать ход изменения величины Х на некоторое время вперед и осуществлять изменения сигнала U(t) с учетом этого прогноза.
Рассмотрим, как обычно действует человек-оператор, которому сравнительно быстро и без колебаний удается возвратить регулируемую величину Х к ее заданному значению Хзад (кривая 4 на рис. 1.).
1) При появлении отклонения DХ от заданного значения (точка t1) оператор начинает «прикрывать» регулируемый орган, однако делать это он будет с определенной осмотрительностью, прогнозируя возможность изменения на будущее. По-видимому, он будет перемещать регулируемый орган тем быстрее, чем дольше будет величина DХ, но при этом будет также оценивать и скорость изменения величины Х, имея в виду, что чем больше эта скорость, тем больше отклонение DХ следует ожидать в будущем.
2) Особенную осторожность он будет проявлять, начиная с момента t2, когда отклонение регулируемой величины достигнет максимума, и начнет уменьшаться. Скорость изменения величины Х становиться отрицательной и, следовательно, нужно ждать дальнейшего уменьшения Х, причем не исключена возможность того, что величина Х станет меньше Хзад, и возникнет новое отклонение DХ, но уже в отрицательную сторону (явление перерегулирования), поэтому с момента t2 оператор будет «прикрывать» регулируемый орган, а в некоторый момент t3 он вообще изменит направление движения регулирующего органа, с тем чтобы приостановить падение величины Х и поддерживать ее на заданном уровне.
Таким образом, человек-оператор в процессе регулирования пользуется (возможно, даже бессознательно) некоторым выработанным практикой эвристическим законом (алгоритмом) регулирования, в соответствии с которым он перемещает регулирующий орган в зависимости от отклонения регулируемой величины и ее скорости изменения во времени. Автоматический регулятор чаще всего работает по некоторым типовым линейным законам регулирования.
 ,
,
 .
.
Правильно спроектировать систему автоматического регулирования – это значит правильно выбрать численные значения коэффициентов Kp, Tд, Tи, так чтобы качество работы системы было наилучшим. Эти коэффициенты называются параметрами настройки регулятора, а процесс определения численных значений параметров настройки, при которых регулирование в некотором смысле будет оптимальным, - динамической настройкой, или настройкой регулятора.
Задачу динамической настройки регуляторов приходится решать на разных стадиях создания систем управления
Впервые эта задача возникает в процессе проектирования системы и ставится как задача выбора из типовых структур и алгоритмов и определению оптимальных численных значений коэффициентов этих алгоритмов в каждом варианте для выбора наилучшего из них.
Второй раз с задачей настройки приходится сталкиваться на стадии внедрения после выполнения монтажа запроектированной системы в процессе пусконаладочных работ. С первого взгляда может показаться, что система настройки на этом этапе должна состоять только в уточнении результатов полученных на стадии проектирования, реально объем работ здесь как показывает опыт, оказывается достаточно большим. Наладочные работы иногда перерастают в серьезные исследования, в процессе выполнения которых не только уточняются параметры настройки, но и изменяется структура системы регулирования.
Нужна ли такая двухступенчатая процедура настройки?
Не является ли она следствием некачественного проектирования?
Ответы на эти вопросы заложены в самой методике решения задачи синтеза системы управления. На стадии проектирования в процедуре синтеза можно выделить следующие этапы:
1. Выбираются варианты возможных структур системы, т.е. определяются сигналы, которые предполагается подавать на регуляторы, а также регулирующие воздействия и составляется (аналитически) или определяется для выбранных входных и выходных сигналов.
2. По этой модели отыскивается оптимальные (в смысле принятого критерия оптимальность) алгоритмы функционирования регуляторов.
Основным уязвимым местом этой процедуры является то, что модель регулирования отражает действительные свойства объекта приближенно. Степень приближения определяется выбранным критерием приближения модели к объекту, выбор которого определяется не его целесообразностью, а удобством математических выкладок и вычислений (как правило, это всякого рода интегральные квадратичные критерии).
Помимо неопределенности выбора критерия приближения следует отметить две особенности построения моделей:
1. Малая погрешность математической модели объекта не гарантируют, что отклонение интегральной системы управления от оптимальной также будет малым.
2. Выбрав некоторый критерий приближения, заранее нельзя сказать, какое конкретное малое численное значение погрешности модели объекта должно быть достигнуто, чтобы можно было считать эту модель удовлетворительной.
Из этого следует, что задача построения математической модели объекта является системной задачей, требующей для своего решения системного подхода. Это значит, что выбор критерия приближения модели к реальному объекту должен зависить от алгоритма функционирования регулятора, для отыскания которого и строиться модель объекта. Таким образом, задача построения модели объекта оказывается противоречивой уже в своей постановке: для построения модели объекта требуется знать алгоритм функционирования регулятора, для определения которого нужна модель («парадокс модели» объекта).
Наряду с погрешностями математических моделей объектов следует учитывать:
- погрешности математического описания промышленных регуляторов, паспортный закон регулирования которых характеризуется определенной степенью приближения;
- свойства реальных объектов, как и свойства аппаратуры управления ими, обладают определенной нестабильностью во времени.
Таким образом, настройка системы при выполнении пусконаладочных работ оказывается необходимой даже тогда, когда свойства объекта не меняются во времени. Реально же из-за нестабильности свойств объекта и др. элементов системы необходимость в периодической настройке возникает и во время эксплуатации системы
2. Большое число упрошенных (инженерных) методов расчета параметров настройки использую следующую схему реализации:
- сначала определяется модель объекта;
- затем рассчитываются оптимальные параметры настройки регулятора.
С этой целью модель объекта отыскивается в виде его экспериментальной переходной характеристики.
Например, вычислив по переходной характеристике отношение ta/Ta (рис.2,3) по графикам (рис. 4) находятся оптимальные значения Кu,  и
и  ,что при известных значениях Ku и ta позволяют легко найти ,
,что при известных значениях Ku и ta позволяют легко найти ,  .
.
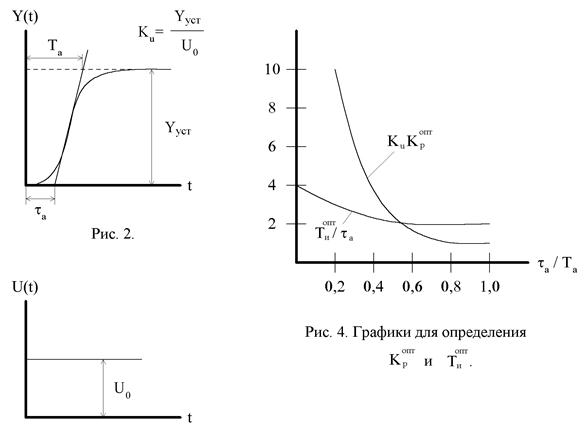
Рис. 3. Переходная характеристика объекта.
Требования к методам автоматической настройки:
1) должны гарантировать получение результата с необходимой точностью;
2) процедура настройка не должна быть связана с отклонением регулятора;
3) процедура настройки не должна сильно нарушать нормальный режим работы объекта;
4) процесс настройки должен обеспечивать частичную или полную автоматизацию.
Этим требованиям отвечают методы адаптивной настройки, их отличие от традиционных методов настройки объясняются схемами их реализации (рис. 5.).
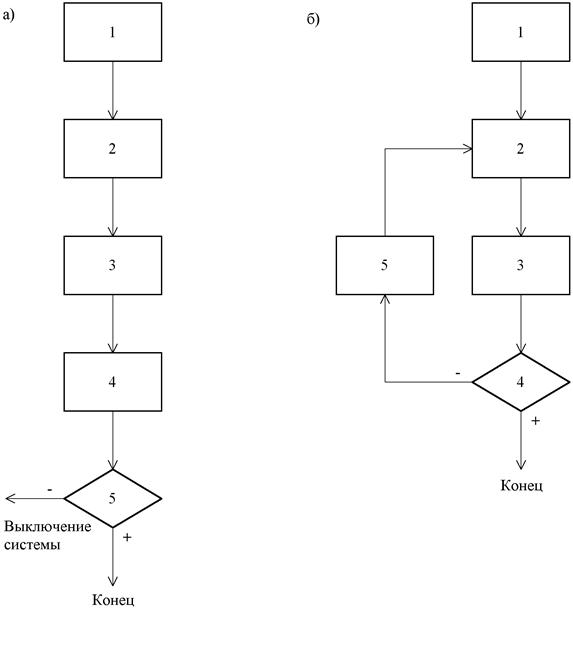
Рис. 5. Схемы реализации традиционных и адаптивных методов настройки.
Традиционные методы (схема а):
1) Экспериментальное исследование объекта.
2) Расчет оптимальной параметров настройки регулятора.
3) Установка в регуляторах найденных параметров настройки.
4) Включение системы регулиров. в работу.
5) Испытание действующей системы регулирования.
1) Включение системы в работу.
2) Установка начальных параметров настройки.
3) Экспериментальное исследование системы.
4) Проверка качества регулирования системы.
5) Расчет новых параметров настройки.
Наиболее важные различия между этими методами:
1. В традиционных методах настройка осуществляется однократно (схема разомкнутая), а в адаптивных методах настройка осуществляется многократно (схема замкнутая).
2. Эксперимент осуществляется над отдельно взятым объектом регулирования (Традиционные методы регулирования), при адаптивных методах эксперимент осуществляется над всей системой регулирования (включающий в себя объект и действующий регулятор).
3. Адаптивные (самонастраивающиеся) системы обладают способностью самостоятельно уточнять параметры при первоначально неизвестных, а также непредвиденно меняющихся во времени свойствах объекта управления. Практически все существовавшие и существующие системы управления являются адаптивными. Только их адаптация не автоматизирована и ее фактически всегда осуществлял человек оператор, который интуитивно действовал по схеме б) рис. 5. и добивался лучих результатов, чем настройка регулятора по инженерным методикам (схема а) рис.5.).
Необходимо отметить, что адаптивные системы за счет изучения объекта ухудшают качество управления объектом по сравнению с качеством управления, достигаемым при известных свойствах объекта. Реально это появляется в том, что управляющее воздействие адаптивного регулятора должно содержать специальную идентифицирующую (изучающую) составляющую, нарушающую нормальный ход процесса. Поэтому непрерывная адаптация не только нецелесообразна, но и вредна.
Адаптивные системы могут быть классифицированы следующим образом:
1. С точки зрения участия человека-оператора в процессе адаптации:
1) системы автоматической адаптации, работающие без человека оператора;
2) системы автоматизированной адаптации (с ЭВМ);
3) системы ручной адаптации (без ЭВМ).
2. С точки зрения периодичности адаптации:
1) системы с непрерывной адаптацией;
2) системы с периодической адаптацией.
4. По принципу организации поиска оптимума настройки адаптивные системы делятся на два класса:
1) Системы, в которых поиск оптимальных параметров настройки осуществляется путем изменения этих параметров и контроля их влияния на показатель качества работы настраиваемой системы (поисковые системы).
2) Системы, в которых оптимальные параметры настройки находятся расчетным путем по определяемой в процессе адаптации математической модели объекта (беспоисковые системы).
Поисковый подход к оптимизации параметров настройки состоит в следующем.
Критерий оптимальной настройки – выпуклая функция параметров настройки и необходимом условием экстремума является равенство нулю частных производных от критерия оптимальности по всем параметрам настройки. Для ПИ – регулятора  и
и  . Параметры настройки регулятора на каждом очередном i+1 шаге вычисляются по результатам экспериментов на предыдущем i шаге по формулам:
. Параметры настройки регулятора на каждом очередном i+1 шаге вычисляются по результатам экспериментов на предыдущем i шаге по формулам:
 (1)
(1)
где gк, gт – коэффициенты пропорциональности, выбираемые из условия сходимости итерационной процедуры.
Содержание блоков в схеме б (рис. 5) в этом случае:
блок 3 - оценка частных производных критерия оптимальности по параметрам настройки; блок 4 – выяснение равны ли 0 частные производные; блок 5 - расчет по формулам (1) новых значений параметров; блок 2 – установка этих значений параметров в регуляторе.
Следует отметить, что поисковые методы нарушают нормальный режим функционирования объекта, т.к. значения варьирования параметров настройки неизвестны и выбирается случайным образом. Воздействие на систему путем изменения ее параметров называется параметрическим воздействием.
Кроме параметрических воздействий при поисковых методах применяются и сигнальные воздействия (специально организованные воздействия). В этом случае на каждом шаге осуществляется двойное активное воздействие на систему – параметрическое и сигнальное. При первоначальной настройке на вход системы подается ступенчатое возмущающее воздействие – изменение отклонение регулируемой величины (рис. 6 (а)).
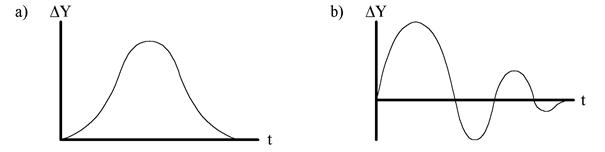
Рис. 6. Реакции системы на ступенчатое воздействие при разных настройках регулятора.
После этого производится некоторое изменение параметров, а затем снова подается такое же воздействие (рис. 6 (b)). В качестве критерия оптимальности настройки можно использовать площадь под кривой процесса регулирования, что позволит определить направление дальнейшего изменения параметров настройки.
5. На практике поисковая процедура оптимальной настройки находит ограниченное применение из-за того, что:
- экспериментальная оценка критерия оптимальности занимает слишком большое время, так что скорость движения к оптимуму оказывается недопустимо малой;
- существенно нарушается работа объекта, особенно при подаче как параметрических, та и сигнальных воздействий.
Поэтому эффективной оказывается процедура адаптации с промежуточной оценкой сю модели объекта и последующим расчетом по ней параметров настройки (здесь не вычисляется значения критерия оптимальности). Блок-схема такой процедуры адаптации приведена на рис.7.:
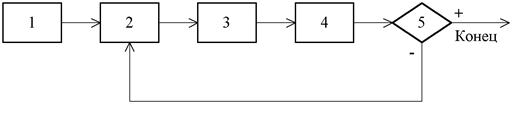
Рис. 7. Схема процедуры адаптпции с промежуточной оценкой модели объекта.
Содержание блоков:
1) включение в работу;
2) установка параметров настройки;
3) идентификация объекта;
4) расчет оптимальных параметров;
5) сравнение найденных параметров с уже установленными. Если они окажутся близкими друг к другу, то настройка окончена, в противном случае возврат к блоку 2 (установка новых параметров настройки).
Оценка модели может осуществляться либо путем пассивного наблюдения (без нарушения нормально работы объекта), либо путем постановки активного эксперимента
Во втором случае процедура настройки во многом совпадает с поисковой, отличие заключается только в информации, которая извлекается из результатов наблюдения за поведением системы до подачи параметрического воздействия и после его подачи. При поисковой процедуре по полученным реализациям вычисляется приращение критерия оптимальности, при адаптации с идентификацией определяется модель объекта
Одним из существенных недостатков беспоисковой процедуры является то, что не контролируется показатель конечной цели – критерий оптимального функционирования настраиваемой системы управления.

