Простейшая система автоматического регулирования с обратной связью показана на рис. 5.34. В ней блок  называют регулятором (от слова Regulator),
называют регулятором (от слова Regulator),  - объектом регулирования (от слова Process), r - управляющим воздействием или уставкой (reference), e - сигналом рассогласования или ошибки (error), u - выходной величиной регулятора, y - регулируемой величиной.
- объектом регулирования (от слова Process), r - управляющим воздействием или уставкой (reference), e - сигналом рассогласования или ошибки (error), u - выходной величиной регулятора, y - регулируемой величиной.
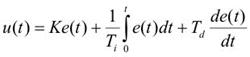
Если выходная переменная u регулятора описывается выражением
 , ,
| (5.36)
|
где  -время;
-время;  - пропорциональный коэффициент (безразмерный), постоянная интегрирования (размерность времени) ипостоянная дифференцирования (размерность времени) регулятора, то такой регулятор называют ПИД-регулятором.
- пропорциональный коэффициент (безразмерный), постоянная интегрирования (размерность времени) ипостоянная дифференцирования (размерность времени) регулятора, то такой регулятор называют ПИД-регулятором.

| |
| Рис. 5.34. ПИД-регулятор в системе с обратной связью
| |
Передаточная функция ПИД-регулятора имеет вид
 .
Регулятором называется устройство, которое следит за функционированием объекта управления и, постоянно анализируя его состояние, вырабатывает определенное управляющее воздействие (сигнал управления).
В общем случае каждый контур регулирования можно рассматривать как некоторую систему, состоящую непосредственно из самого объекта регулирования и регулятора, который через исполнительное устройство может влиять на регулируемый параметр объекта. Работа регулятора осуществляется на основе постоянного анализа регулируемого параметра, характеризующего состояние объекта, для чего к входу регулятора подключают датчик. Информационная связь между датчиком, измеряющим регулируемый параметр, и входом регулятора называется обратной связью. Так образуется замкнутый контур управления, а сама система управления называется замкнутой. Именно благодаря наличию обратной связи с объектом становится возможным реализовывать действительно качественное, можно сказать, зрячее управление.
В современных АСУ ТП функции регулятора реализуются в рамках прикладной программы управления на уровне контроллера. Так один промышленный контроллер может программно реализовать до тысячи регуляторов. Это современный подход к построению систем управления; тем не менее, локальные регуляторы, выполненные в виде отдельных устройств, по сей день активно используются там, где не требуется столь мощного функционала.
ПИД-регулятор — это звено в контуре управления с обратной связью, используемое для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (так называемой уставки) и генерирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения. Если какие-то из составляющих слагаемых не используются, то регулятор соответственно называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п. На рисунке 2 показана упрощенная функциональная схема ПИД-регулятора:
Назначение ПИД-регулятора заключается в поддержании некоторой величины PV на заданном значении SP с помощью изменения другой величины OP, где
PV – измеряемый параметр (process value); SP – заданное значение измеряемого параметра (уставка, setpoint); OP – управляющее воздействие (output); Разность (SP-PV) называется ошибкой или рассогласованием. .
Регулятором называется устройство, которое следит за функционированием объекта управления и, постоянно анализируя его состояние, вырабатывает определенное управляющее воздействие (сигнал управления).
В общем случае каждый контур регулирования можно рассматривать как некоторую систему, состоящую непосредственно из самого объекта регулирования и регулятора, который через исполнительное устройство может влиять на регулируемый параметр объекта. Работа регулятора осуществляется на основе постоянного анализа регулируемого параметра, характеризующего состояние объекта, для чего к входу регулятора подключают датчик. Информационная связь между датчиком, измеряющим регулируемый параметр, и входом регулятора называется обратной связью. Так образуется замкнутый контур управления, а сама система управления называется замкнутой. Именно благодаря наличию обратной связи с объектом становится возможным реализовывать действительно качественное, можно сказать, зрячее управление.
В современных АСУ ТП функции регулятора реализуются в рамках прикладной программы управления на уровне контроллера. Так один промышленный контроллер может программно реализовать до тысячи регуляторов. Это современный подход к построению систем управления; тем не менее, локальные регуляторы, выполненные в виде отдельных устройств, по сей день активно используются там, где не требуется столь мощного функционала.
ПИД-регулятор — это звено в контуре управления с обратной связью, используемое для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (так называемой уставки) и генерирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения. Если какие-то из составляющих слагаемых не используются, то регулятор соответственно называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п. На рисунке 2 показана упрощенная функциональная схема ПИД-регулятора:
Назначение ПИД-регулятора заключается в поддержании некоторой величины PV на заданном значении SP с помощью изменения другой величины OP, где
PV – измеряемый параметр (process value); SP – заданное значение измеряемого параметра (уставка, setpoint); OP – управляющее воздействие (output); Разность (SP-PV) называется ошибкой или рассогласованием.
|
 2015-04-06
2015-04-06 1823
1823







