 2014-02-24
2014-02-24 856
856Общая задача синтеза дискретных систем не отличается от выше перечисленных. Основное отличие - для улучшения статических, динамических свойств можно применять как непрерывными так и дискретные устройства и их комбинации.
Для обеспечения приемлемого качества п.п. в линейных дискретных системах применяют методы аналогичные непрерывным системам..
Один из удобных методов - метод синтеза по ЛАЧХ в основе которого лежат частотные показатели качества. Если не принимать во внимание особенности, что ЛАЧХ в функции абсолютно свободной частоты,т.е.

Т- период дискретности.
То сам процесс синтеза отличается от обычного в линейных непрерывных системах.
Переход от найденной в результате синтеза частот передаточной функции дискретного корректирующего устройства по алгоритму проводится через передаточную функцию, которая находится путём замены

Аналогом метода интегрально-квадратичных оценок является метод квадратичных суммарных оценок. Оптимальное значение варьируемых параметров проще находится путём направленного перебора решений разностных уравнений на цифровых ЭВМ.
Специфичным методом синтеза является метод полиномиальных уравнений позволяющий сформулировать желаемую передаточную функцию дискретной системы, а также определить структуру и параметры дискретного корректирующего устройства.
Но системы, синтезируемые таким методом, в ряде случаев обладаю малым запасом устойчивости. В последнее время развиты методы синтеза дискретных систем на базе ЭВМ. Например методы, использующие передаточные функции дискретных систем, частотные характеристики и частотные показатели качества.
При использовании этих методов структура дискретного устройства задается в виде частотно-передаточной функции.
D(j1)=
Такое задание обеспечивает выбор области значений допустимых параметров и исключает возможность получения неустойчивого алгоритма.
Задача синтеза сводится к значений системы и связанных с ними параметров при которых заданный частотный критерий качества достигает набольшего значения.
Выбор технических средств.
При проектировании СУ рациональный выбор чувствительных элементов (датчиков) играет важную роль. Датчики представляют собой устройство, построенное на различных физических принципах и определяют точность СУ.
Требования к чувствительным элементам:
1) по точности и по чувствительности;
2) по разрешающей способности;
3) по линейности и однозначности статической характеристики;
4) по стабильности характеристик во времени;
5) по инерционности;
6) по устойчивости ко внешним факторам;
7) по надёжности;
8) по массо-габаритам;
9) по энергоёмкости.
Выбор системы элементов.
При выборе системы ориентируются на совокупность элементов - их функциональную пригодность, размеры, надёжность, и др.
Задача оптимизации выбора технических средств на может быть реализована обычным методами оптимизации из-за неупорядоченности и разряженности рада технических элементов.
Регулирующие органы
(поворотные заслонки, жалюзи, дроссельные клапаны и т.д.)
Правильно выбранный РО не должен искажать характеристику объекта.
С помощью РО можно улучшить характеристику объекта регулирования. Для этого используют изменения кинематических связей между РО и исполнительными механизмами.
Экспериментальное определение динамических свойств промышленного объекта управления. (ПОУ) (прокатный стан, печь и т.д.)
Динамические свойства ПОУ обычно определяются по переходным процессам и частотным характеристикам, полученным в результате экспериментов.
Перед экспериментом:
изучается конструкция ПОУ, аппаратура и регуляторы. Анализируется работа регистрирующих устройств в процессе нормальной эксплуатации. Определяются возможные источники возмущающих воздействий.
Составляется структурная схема
 |
Опыт производится с момента введения входных возмущающих воздействий и с момента установления выходной величины ПОУ.
В случае, если после внесения воздействия через некоторое время п.п. не установится, а выходные характеристику ПОУ приближаются к предельным или выше чем нормальные характеристики то воздействие следует уменьшать Алгебраическая сумма этих воздействий даёт импульсное воздействие и в результате получается импульсная переходная функция.
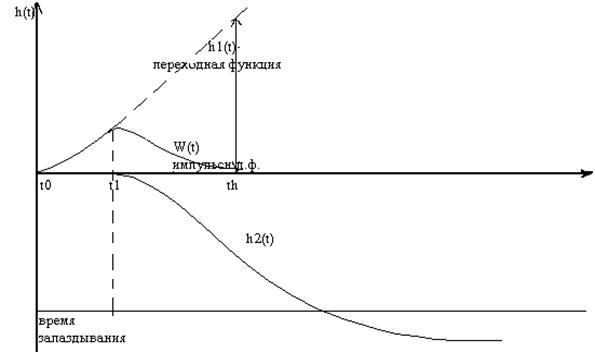
Импульсная характеристика представляет сумму двух переходных характеристик W(t) которые направлены в разные стороны и сдвинуты относительно друг друга на время действия импульса.
Для перестройки импульсной характеристики в переходную используют принцип наложения: - ординаты полученной импульсной переходной функции на участке
t0 - t1 заменяют на участке t1-th добавить каждой точке имп. характеристики ординаты этой же характеристики, сдвинутые вправо на время действия импульса.
При снятии переходной характеристики в статистическом объекте удалось зарегистрировать только начальную часть характеристики, достаточно представительную, то остальная часть может быть экстраполирована.
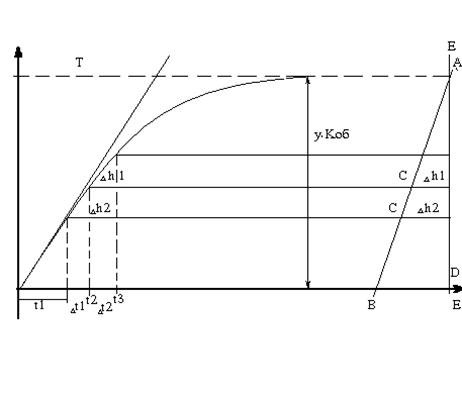

 Для этого на экспериментальной кривой выбирается две точки для одинаковых интервалов определяются соответствующие отрезки ординаты Dh1 Dh2. Эти отрезки откладываются на прямой ЕЕ как показано на рисунке. Через точки С и С проводят прямую АВ до пересечения с 0Е, которое определяет новое, установившееся значение новой координаты, что позволяет найти постоянную времени t и коэффициент усиления объекта К.
Для этого на экспериментальной кривой выбирается две точки для одинаковых интервалов определяются соответствующие отрезки ординаты Dh1 Dh2. Эти отрезки откладываются на прямой ЕЕ как показано на рисунке. Через точки С и С проводят прямую АВ до пересечения с 0Е, которое определяет новое, установившееся значение новой координаты, что позволяет найти постоянную времени t и коэффициент усиления объекта К.
Аппроксимация динамических характеристик.
Особенности характеристик ПОУ позволяют аппроксимировать их переходные функции дробно-рациональными функциями с введением в случае необходимости транспортного запаздывания.
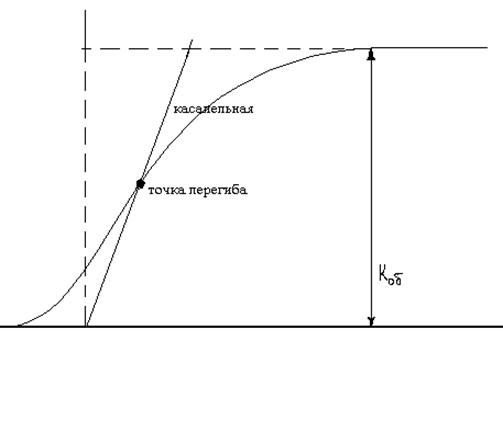
В первоначальных расчётах используется критерий приближенности, основанный на разложении действительных переходных характеристик объекта в ряд Тейлора в окрестностях точки и её перегиба.
Условия приближения:
Если h(t) - действительная переходная характеристика полученная экспериментальным путём ha(t) -её аппроксимация.
Наилучшее приближение в случае когда:
h(t)перегиба = ha(t)перегиба
производные
dh(t)перегиба/dt = d ha(t)перегиба/dt
коэффициенты передачи объекта:
h¥= ha ¥=Kобъекта
Промышленные регуляторы
n Непрерывные (П,ПИ,ПИД и др.);
n дискретные (релейные, импульсные и др.)
Релейные регуляторы - приборного типа, связывают позиционными и с постоянной скоростью исполнительного механизма.
Импульсные - с амплитудной и широтной модуляцией.
Общий вид структуры регулятора:
 | |||
 |
1,2 датчики входной, измеряемой и задающей воздействие величин.
УУ - управляющее устройство.
ИУ- исполняющее устройство.
Для ПИД - регулятора:


 |
ПИ
Способы формирования закона управления (регулирования)
Основной элемент регулятора- измерительный элемент, делители, исполнительные механизмы и устройства ОС.
Введением в закон регулирования интегральной составляющей, осуществляется механизмом передаточная функция которого:
Wимп=K/ Тимп
Тимп - время перестановки исполнительного механизма регулирующего органа из положения в положение.
Реализация ПИД регулятора:
(три варианта, с помощью измерительных устройств)
 |
В этой схеме предусмотрено наличие регулятора и измерительных органов для измерения отклонения и скорости изменения контролируемого параметра.
 |
Т пред - постоянная времени воздействия скорости от отклонения параметра. Первый измерительный орган - скорость, второй - отклонение регулируемой величины.
Т пред= Кр3/Кр2 - коэффициенты, соответствующие введению в закон регулирования производных отклонения.
 |
Тизодерма = C/Kp
Тизодерма- постоянная времени (изменение удвоения)
C - коэффициент пропорциональности означающий введение в закон регулирования пропорциональной составляющей.
Kp - коэффициент при дифуравнении, означающий введение интеграла от отклонения регулируемой величины.
Выбор регулятора и его настройка.
В настоящее время существуют различные методы выбора регулятора.
Все методы предусматривают наличие данных:
а) о динамических параметрах объекта управления:
Тоб - постоянная времени объекта;
tоб - постоянная запаздывания;
Коб - коэф-т передачи;
б) о типе оптимального п.п. в системе регулирования (апериодический п.п.);
в) о показателях качества процесса регулирования;
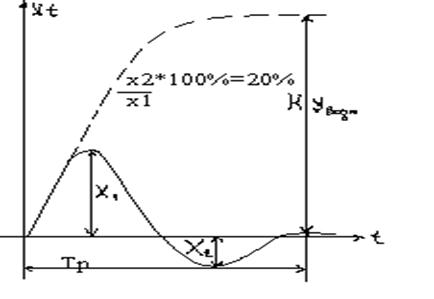
Наибольшее распространение получили 3 типовых оптимальных п.п.:
1) граничный апериодичный п.п.
с 20-ти процентным перерегулированием
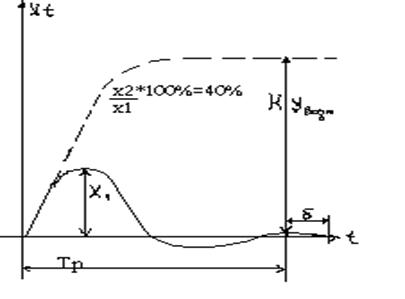
с 40-а процентным перерегулированием
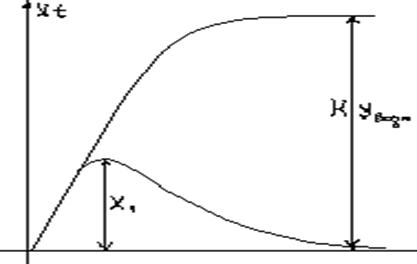
граничный апериодичный процесс с минимальным временем и с максимальным динамическим отклонением.
Процесс с 40% самый длительный но имеет самое малое динамическое отклонение.
Х1-максимальное динамическое отклонение;
Х2 - вторичное перерегулирование;
Х2/Х1 - показатель перерегулирования.
d - остаточное отклонение;
Тр - время регулирования.
Эти данные позволяют рассчитать динамический коэффициент регулирования Rd:
Rd = Х1/Х0, где Х0=Увозм*Коб
для астатических объектов Х0=Увозм/Тоб.
Оценка класса регулятора:
t/Tоб регулятор аппроксимируется звеном 1-го порядка с запаздыванием (статический объект) или интегрирующим звеном (астатический объект). Если t /Tоб<0.1 - релейный регулятор. Чтобы выбрать закон регулирования используют графики.
Пример: методика выбора регулятора непрерывного для статических объектов.
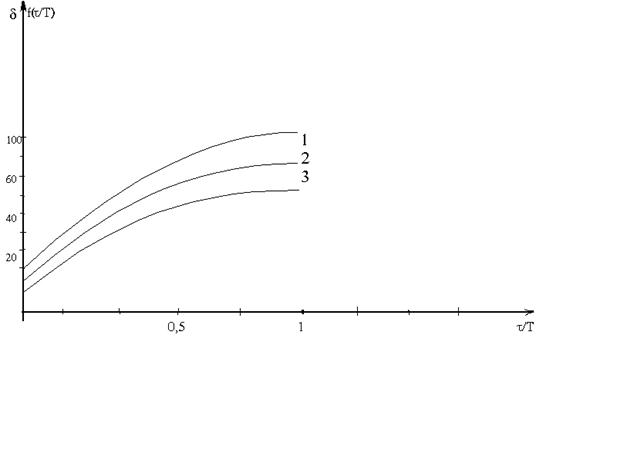
По известному Rd для функций f(t /T) есть графики:
|
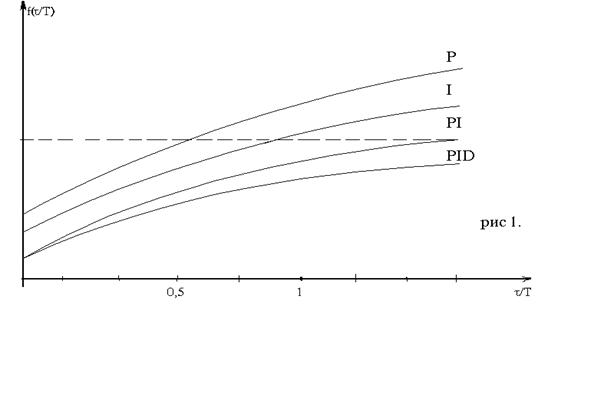
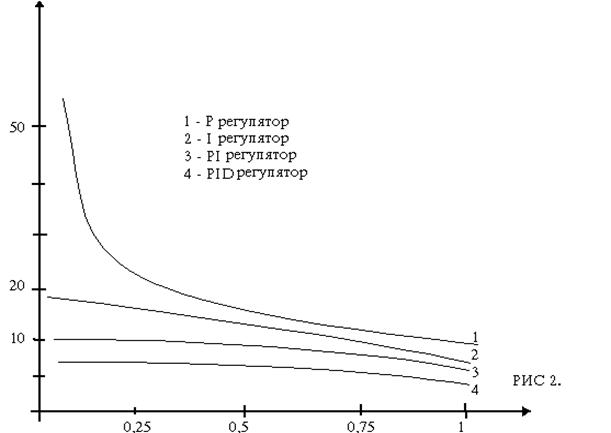
На этих рисунках 1 и 2 кривые построены для процесса с 20-и % перерегулированием. Такие графики существуют для всех процессов.
Для П- регулятора надо проверять его по статическому отклонению.
d- условное остаточное отклонение
Увозм - задаётся 15-35 % хода регулируемого органа.
1 - для граничного апериодичного процесса;
2 - для 20-и % перерегулирования.








