 2014-02-24
2014-02-24 3534
3534Кривошипные и кулачковые механизмы работают с периодическим изменением направления и скорости движения ведомого звена. При этом начальное и конечное положения этого звена повторяются периодически, не меняясь. Ведомое звено движется непрерывно, за исключением участка кулачка (кулачкового механизма), соответствующего выдержке (когда рабочий орган неподвижен).
В ряде случаев необходимо периодически перемещать в одном направлении ведомое звено, например, подавать инструмент на глубину резания в строгальных станках, поворачивать револьверную головку. Движение при этом происходит кратковременно, толчком. Для этого служат храповые и мальтийские механизмы.
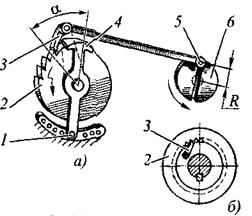
Храповые механизмы могут быть с наружным и внутренним зацеплением. Вмеханизме с наружным зацеплением (рис. 3.27, а) собачке 3 сообщается качательное движение. При движении против часовой стрелки собачка через зубья храпового колеса 2 поворачивает его на некоторый угол. При обратном ходе собачка, проскальзывая по зубьям храпового колеса, не вращает его. Качательное движение собачка 3 получает через шатун от ведущего кривошипного диска 6 с пальцем 5. Изменение положения пальца 5 в пазу (т.е. изменение радиуса R) позволяет регулировать угол поворота a собачки 3. Другим способом изменять угол поворота храпового колеса при неизменном положении кривошипного пальца 5 можно щитком 4, который закрывает часть зубьев храпового колеса, и собачка в начальный период рабочего движения скользит по его поверхности, а затем сходит с него, попадая на зуб храпового колеса, и поворачивает его. Щиток в выбранном положении удерживает фиксатор 1.
В храповом механизме с внутренним зацеплением (см. рис. 3.27, б) вал с жестко посаженным на нём диском, к которому прикреплена собачка 3, имеет качательное движение, и собачка, вращаясь по часовой стрелке, поворачивает храповое колесо 2. Когда собачка движется в обратном направлении, храповое колесо неподвижно.
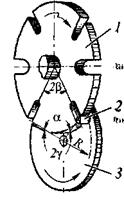
Мальтийские механизмы применяют для того, чтобы периодически поворачивать на определённый угол 2b ведомое звено - многопазовый диск ("мальтийский крест") 1 (рис. 3.28) при равномерном повороте ведущего звена - кривошипного диска 3. За часть оборота кривошипного диска 3 (угол 2a), когда происходит поворот диска 1, кривошипный палец (цевка) 2 вводится в радиальный паз и выводится из него. В момент вывода пальца из одного паза следующий паз оказывается в положении, при котором палец может быть снова введён в него. Для смягчения удара палец должен входить в паз в строго радиальном направлении. На угол 2g кривошип поворачивается вхолостую. Если у кривошипного диска 3 два пальца, то за один его оборот многопазовый диск 1 поворачивается дважды, каждый раз на угол 2b.
| |||
| |||

