 2014-02-12
2014-02-12 422
422Большинство задач управления, которые реализуются с помощью МК, требуют исполнения их в реальном времени. Под этим понимается способность системы получить информацию о состоянии управляемого объекта, выполнить необходимые расчетные процедуры и выдать управляющие воздействия в течение интервала времени, достаточного для желаемого изменения состояния объекта.
Возлагать функции формирования управления в реальном масштабе времени только на центральный процессор неэффективно, так как это занимает ресурсы, необходимые для расчетных процедур. Поэтому в большинстве современных МК используется аппаратная поддержка работы в реальном времени с использованием таймера (таймеров).
Модули таймеров служат для приема информации о времени наступления тех или иных событий от внешних датчиков событий, а также для формирования управляющих воздействий во времени.
Модуль таймера 8-разрядного МК представляет собой 8-ми или 16-разрядный счетчик со схемой управления. Схемотехникой МК обычно предусматривается возможность использования таймера в режиме счетчика внешних событий, поэтому его часто называют таймером/счетчиком. Структура типичного 16-разрядного таймера/счетчика в составе МК приведена на рис 28.
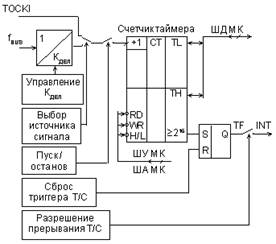
Рис. 28. Структура модуля таймера/счетчика.
В памяти МК 16-разрядный счетчик отображается двумя регистрами: TH — старший байт счетчика, TL — младший байт. Регистры доступны для чтения и для записи. Направление счета — только прямое, то есть при поступлении входных импульсов содержимое счетчика инкрементируется. В зависимости от настройки счетчик может использовать один из источников входных сигналов:
импульсную последовательность с выхода управляемого делителя частоты fBUS;
сигналы внешних событий, поступающие на вход TOCKI контроллера.
В первом случае говорят, что счетчик работает в режиме таймера, во втором — в режиме счетчика событий. При переполнении счетчика устанавливается в "единицу" триггер переполнения TF, который генерирует запрос на прерывание, если прерывания от таймера разрешены. Пуск и останов таймера могут осуществляться только под управлением программы. Программным способом можно также установить старший и младший биты счетчика в произвольное состояние или прочитать текущий код счетчика.
Модули усовершенствованного таймера используются в составе МК в различных модификациях. При этом число каналов входного захвата и выходного сравнения в модуле может быть различным. Так, в МК семейства HC05 фирмы Motorola типовыми решениями являются модули 1IC+1OC или 2IC+2OC, а модуль таймера в составе МК только один. В ряде модулей каналы могут быть произвольно настроены на функцию входного захвата или выходного сравнения посредством инициализации. Счетчик модуля усовершенствованного таймера может не иметь функции программного останова. В этом случае состояние счетчика нельзя синхронизировать с каким-либо моментом работы МК, и такой счетчик характеризуется как свободно считающий (free counter).
Аппаратные средства усовершенствованного таймера позволяют решить многие задачи управления в реальном времени. Однако по мере роста сложности алгоритмов управления отчетливо проявляются ограничения модулей усовершенствованного таймера, а именно:
недостаточное число каналов захвата и сравнения, принадлежащих одному счетчику временной базы. Это не позволяет сформировать синхронизированные между собой многоканальные импульсные последовательности;
однозначно определенная конфигурация канала (или захват или сравнение) часто не удовлетворяет потребностям решаемой задачи;
формирование сигналов по методу широтно-импульсной модуляции (ШИМ) требует программной поддержки, что снижает максимально достижимую частоту выходного сигнала.
Поэтому следующим этапом развития модулей подсистемы реального времени МК стали модули процессоров событий. Впервые модули процессоров событий были использованы компанией Intel в МК семейства 8xC51Fx. Этот модуль получил название программируемого счетного массива (Programmable Counter Array — PCA).
РСА обеспечивает более широкие возможности работы в реальном масштабе времени и в меньшей степени расходует ресурсы центрального процессора, чем стандартный и усовершенствованный таймеры/счетчики. К преимуществам РСА также можно отнести более простое программирование и более высокую точность. К примеру, РСА может обеспечить лучшее временное разрешение, чем таймеры 0, 1 и 2 МК семейства MCS-51, так как счетчик РСА способен работать с тактовой частотой, втрое большей, чем у этих таймеров. РСА также может решать многие задачи, выполнение которых с использованием таймеров требует дополнительных аппаратных затрат (например, определение фазового сдвига между импульсами или генерация ШИМ-сигнала). РСА состоит из 16-битного таймера-счетчика и пяти 16-битных модулей сравнения-защелки, как показано на рис 4.8.








