 2014-02-13
2014-02-13 1718
1718Линейные модели поверхности отклика имеют ограниченное применение при исследовании сложных систем. В частности, они используются для поиска области значений управляемых переменных х, обеспечивающих оптимальное (близкое к нему) значение функции отклика (выходной переменной у),так называемой почти стационарной области. Однако возможность детального анализа поверхности отклика в этой области и поиска оптимального решения с помощью линейной модели ограничена, так как в ней коэффициенты линейной регрессии становятся незначимыми, а модель - неадекватной. Поэтому для более подробных исследований на практике используется описание поверхности отклика полиномами 2-го и 3-го порядков, позволяющими учесть кривизну поверхности. В литературе [1.2] рассматриваются планы для моделей как второго, так и более высокого порядка. В данном пособии ограничимся рассмотрением вопросов планирования эксперимента только для моделей второго порядка.
Пусть для описания поверхности отклика используется полином 2-го порядка вида:
 . (7.1)
. (7.1)
Общее число коэффициентов в модели:
 (7.2)
(7.2)
Для оценки коэффициентов полинома порядка d необходимо иметь такую систему планирования экспериментов, в которой каждая независимая переменная xi принимала бы не меньше чем (d+1) различных значений (уровней). Так, для полинома 2-го порядка - не меньше чем на трех уровнях. Очевидно, что планы полного факторного эксперимента типа 3k неприемлемы из-за большого числа опытов. Поэтому при проведении экспериментов обычно применяют композиционные планы, позволяющие использовать результаты наблюдений, проводимых при построении линейной модели (к нелинейным моделям переходят, как правило, тогда, когда линейная модель оказывается неадекватной).
В качестве такого плана Боксом был предложен центральный композиционный план (ЦКП), который может быть получен путем добавления некоторого числа точек к "ядру", образованному планом для линейной модели.
В качестве такого "ядра" используется полный или дробный факторный план вида 2К или 2k-m. К нему добавляется точка в центре плана (с координатами х0=0) и 2К "звездных" точек с координатами (± ,о...0)... (0...0.±). (рис.7.1).
,о...0)... (0...0.±). (рис.7.1).
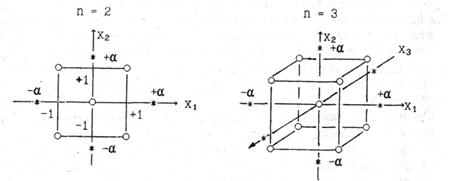
Рис. 7.1.
В отличие от планов для моделей 1-го порядка построить планы 2-го порядка, удовлетворяющие сразу нескольким критериям оптимальности, невозможно. Однако, варьируя величину а и число точек п0 в центре плана, можно получить центральные композиционные планы, обладающие различными свойствами.








