2014-02-13
2014-02-13 1913
1913Определение Алгебраическим моментом пары сил называют взятое со знаком (+) или (-) произведение модуля одной из сил пары на плечо пары сил (расстояние между линиями действия сил пары).

Знак (+), как обычно, мы приписываем моменту, если пара "стремится" вращать тело против часовой стрелки, (-) – для вращения по часовой стрелке.
Алгебраический момент пары сил не зависит от переноса сил пары вдоль своих линий действия. Алгебраический момент пары сил численно равен (со знаком (+) или (-)) площади параллелограмма ACDB или удвоенной площади треугольников ABC или ABD.
Две пары сил называют эквивалентными, если их действие на твердое тело одинаково при прочих равных условиях.
Теорема.
 Пару сил, действующую на твердое тело, можно заменить другой парой сил, расположенной в той же плоскости действия и имеющий одинаковый с первой парой сил алгебраический момент (Две пары сил, расположенные в одной плоскости, эквивалентны, если они имеют одинаковые алгебраические моменты)
Пару сил, действующую на твердое тело, можно заменить другой парой сил, расположенной в той же плоскости действия и имеющий одинаковый с первой парой сил алгебраический момент (Две пары сил, расположенные в одной плоскости, эквивалентны, если они имеют одинаковые алгебраические моменты)
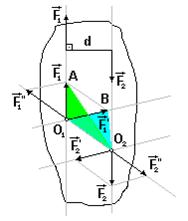
Доказательство: Перенесем силы F1, F2 исходной пары вдоль их линий действия в новые произвольные точки О1, O2. Проведем через эти точки прямую О1О2 и две произвольные параллельные прямые. Разложим вектора F1 и F2 в точках О1 и О2 на F1',F1" и F2',F2" в направлении на эти прямые. Силы F1", F2" образуют "нулевую" систему сил, которую можно отбросить. У нас остается пара сил F1',F2' с новым плечом и новыми модулями. Эта пара сил эквивалентна исходной, т.к. при всех преобразованиях мы не нарушали условие эквивалентности систем сил:
|
|
|
Момент новой пары сил равен моменту исходной пары сил.
Выводы:
а) пару сил как жесткую фигуру можно как угодно поворачивать и переносить в ее плоскости действия,
б) у пары сил можно изменять плечо и модули сил, сохраняя при этом алгебраический момент пары и плоскость действия.
Эти манипуляции над парами сил не изменяют их действия на твердое тело.
Теорема. Действие пары сил на твердое тело не изменяется от переноса этой пары сил в параллельную плоскость (без доказательства, доказательство может быть проведено методами, аналогичными методам из предыдущей теоремы).
Плоскость действия, момент и направление вращения пары определяется через векторное произведение.


Векторный момент пары сил, действующей на твердое тело есть свободный вектор (точкой приложения может быть любая точка тела).
Теорема. Сумма векторных моментов сил, входящих в состав пары, относительно любой точки не зависит от выбора точки и равна векторному моменту этой пары сил.

Для сложения двух пар сил, лежащих в пересекающихся плоскостях, надо сложить их векторные моменты в любой точке по правилу параллелограмма (так как вектора моментов – вектора свободные).
|
|
|
Таким образом,  для n произвольно расположенных пар.
для n произвольно расположенных пар.
Для равновесия пар сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма проекций векторных моментов пар сил на каждую из трех координатных осей была равна нулю.
Лекция 3 (статика)
«Приведение системы сил к простейшей системе, условия равновесия систем сил, распределенные силы»
Приведение системы сил к простейшей системе
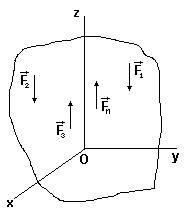
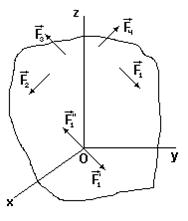 Пусть на тело действует система сил
Пусть на тело действует система сил  .
.
Приведем систему сил к заданному центру (докажем теорему Пуансо). Выберем произвольную точку О за точку приведения. Рассмотрим одну из сил системы – F1. Добавим в точке О нулевую систему сил – (F1',F2"). Заметим, что силы (F1,F1") представляют пару сил, которую можно заменить вектором момента пары M0(F1), приложенным в точке О (он же равен моменту силы F1 относительно центра О), т.е. исходная сила эквивалентна силе F1' и вектору момента пары, обе приложены в точке О.

Проведя аналогичную операцию со всеми векторами исходной системы сил мы получим два пучка векторов, приложенных в точке О – пучок сил  и пучок векторов моментов
и пучок векторов моментов  , которые приводятся к эквивалентной системе двух векторов:
, которые приводятся к эквивалентной системе двух векторов:
Главным моментом системы сил относительно точки О тела называют сумму векторных моментов всех сил системы относительно этой точки (вектор момента результирующей пары М0). Вектор М0 зависит от точки приведения О.
Условия равновесия систем сил
Пространственная система сил
Если система сил находится в равновесии, то в равновесии находится и эквивалентная ей система, состоящая из равнодействующей и результирующего момента пары. Чтобы такая система сил была эквивалентна нулю, необходимо и достаточно, чтобы
 (для любой точки О)
(для любой точки О)
Эти условия являются векторными условиями равновесия для любой системы сил. В аналитической форме это эквивалентно Rx=Ry=Rz=0; Mx=My=Mz=0, т.е. в самом общем случае имеем шесть скалярных уравнений равновесия.
Пространственная система параллельных сил
 Oz, т.е.
Oz, т.е. 
Mz тождественно равно нулю, 
Имеем в итоге три уравнения:

Плоская система сил