 2015-01-30
2015-01-30 760
760В некоторых управляемых системах основные переменные возмущения проявляются очень быстро. Регулируемая переменная сильно отклоняется от опорной переменной в течение короткого отрезка времени. Подобные отклонения можно компенсировать при помощи Д-регулятора.
Выходная переменная Д-регулятора пропорциональна временному изменению в отклонении системы. Поэтому в результате резкого изменения в отклонении системы на выходе регулятора генерируется бесконечно большая регулирующая переменная.
Область применения
Так как Д-регулятор реагирует только на изменение в отклонении системы, то сам по себе он не применяется и всегда комбинируется с П- или ПИ-регулятором.
Регулятор дифференциального действия не способен исправить остаточное отклонение системы и поэтому редко применяется в промышленности.
Регуляторы дифференциального действия применяются в комбинации с регулятором пропорционального действия или интегрального действия.
Чем быстрее происходит изменение в отклонении системы, тем больше становится эффективность регулятора дифференциального действия.
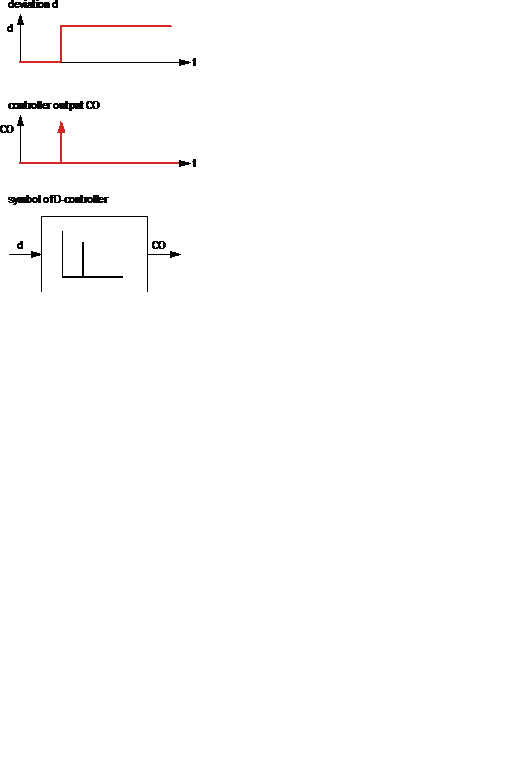
| Deviaton d | Отклонение d |
| Controller output CO | Выход регулятора СО |
| Symbol of D-controller | Символ Д-регулятора |
Временная реакция регулятора дифференциального действия: В случае с Д-регулятором регулирующая переменная пропорциональна изменению в отклонении системы.








