 2015-01-30
2015-01-30 672
672К 89 Метрологическое обеспечение средств измерений: учеб. пособ. [эл. изд.]/ В.А. Кузнецов. - Самара: Самар. гос. техн. ун-т, 2010. - 92 с.: ил.
Рассмотрены цели и задачи метрологического обеспечения, основные статические, динамические и метрологические характеристики средств измерений. Изложены принципы организации государственной метрологической службы и методы поверок средств измерений.
Для студентов высших технических учебных заведений специальности 200106 «Информационно-измерительная техника и технологии» и смежных специальностей.
Рецензент: д-р техн. наук В.Н. Якимов
УДК 621.317
К 89
Системные требования: Pentium III; HDD 20 Gb; ОЗУ 256 Mb; Windows 98, 2000, XP; MS Office 2003.
© В.А. Кузнецов, 2010
© Самарский государственный
технический университет, 2010
1. ОСНОВНЫЕ МЕТРОЛОГИЧЕСКИЕ
ХАРАКТЕРИСТИКИ СРЕДСТВ ИЗМЕРЕНИЙ
И ИХ НОРМИРОВАНИЕ
1.1. Понятие метрологического обеспечения
1.1.1. Роль метрологического обеспечения
в научно- техническом прогрессе
и обеспечении качества продукции
Одним из первых законов, разработанных Государственной Думой, является Закон об обеспечении единства измерений, принятый в 1993 г. Переход к рыночной экономике, глобализация общества, создание общего мирового рынка товаров и услуг, разделение труда немыслимы без обеспечения единства измерений, соблюдения норм и требований в области метрологии и международных стандартов качества.
Дальнейший научно-технический прогресс связывается с развитием нанотехнологий и повышением точности измерения. В настоящее время перед информационно- измерительной техникой ставится задача значительного повышения точности измерения физических величин с одновременным расширением диапазонов измерения и условий эксплуатации приборов.
Только высокоточные измерения позволят развивать новые научные направления и создавать продукцию более высокого качества.
Все эти задачи и решаются с помощью метрологического обеспечения.
1.1.2. Цель и задачи метрологического обеспечения
Согласно стандарту «средство измерения - это техническое средство, используемое при измерении и имеющее заданные метрологические характеристики».
Цель метрологического обеспечения - получение требуемых метрологических характеристик средств измерений. В задачу метрологического обеспечения входит получение измерительной информации с заданной точностью.
1.1.3. Основы метрологического обеспечения (МО)
Метрологическим обеспечением называется комплекс научных, нормативно- технических, организационных мероприятий и технических средств, обеспечивающих единство измерений и получение измерительной информации с требуемой точностью.
Мероприятия, входящие в метрологическое обеспечение, можно показать диаграммой (рис. 1.1).
 |
Рис. 1.1
Научной основой МО является метрология. Метрология - это наука об измерениях, методах и средствах обеспечения их единства и способах достижения требуемой точности.
Нормативно-технические мероприятия МО основаны на комплексе стандартов ГСИ (Государственная система обеспечения единства измерений) и нормативных документов, связанных с разработкой и производством средств измерений, надзором за ними, методиками проведения измерений.
Организационные мероприятия МО определяются Государственной метрологической службой, которая включает в себя центральные управляющие органы, региональные метрологические службы, обеспечивающие поверку средств измерений и надзор за ними.
Технические средства МО включают в себя эталоны единиц измерения, образцовые меры и приборы, используемые при проверке и измерениях.
1.1.4. Этапы метрологического обеспечения
Метрологические обеспечения применяются как на стадии разработки, производства средств измерений, так и на стадии эксплуатации.
На стадии разработки средств измерений МО включает в себя:
− метрологическую экспертизу технического задания;
− метрологическую экспертизу конструкторской и проектной документации;
− разработку технических средств для метрологической аттестации и поверки;
− разработку методики приемочных испытаний.
На стадии производства средств измерений МО включает в себя:
− метрологическую экспертизу технической, в том числе технологической документации;
− государственные или ведомственные испытания средств измерений;
− государственный или ведомственный метрологический надзор за производством;
− первичную поверку средств измерений.
На стадии эксплуатации средств измерений МО включает в себя:
− периодическую поверку средств измерений;
− государственный или ведомственный метрологический контроль над применением средств измерений.
1.2. Основные статические характеристики
средств измерений
Метрологическими характеристиками средств измерений называются характеристики таких свойств, которые определяют результаты и погрешности измерений.
Метрологические характеристики подразделяются на статические характеристики, динамические характеристики, характеристики погрешностей измерения и характеристики функций влияния возмущающих величин. Это можно показать в виде диаграммы (рис. 1.2).
 |
Рис. 1.2
К основным статическим характеристикам относятся:
1) функция преобразования;
2) чувствительность;
3) порог чувствительности;
4) диапазон измерения;
5) входной и выходной импеданс.
1.2.1.Функция преобразования (ФП)
Функция преобразования (ФП) - это функция, определяющая зависимость выходной величины измерительного преобразования от входной (рис. 1.3).
 |
Рис. 1.3
Функция преобразования  .
.
ФП, как любая функциональная зависимость, может быть задана аналитически, графически и таблично, например (рис. 1.4).
 |

Рис. 1.4
В связи с неизбежным случайным изменением параметров СИ и воздействием на СИ возмущающих факторов, функция преобразования является случайной функцией. Коэффициенты a и b изменяются случайным образом в определенных границах.
В связи с этим различают номинальную ФП и реальную ФП.
Номинальная ФП - это неслучайная функция, полученная путем усреднения ФП группы однотипных преобразователей, снятых многократно (рис. 1.5).
 |
Рис. 1.5
ФП отдельно взятого преобразования представляет собой реальную ФП.
Номинальная ФП является паспортной характеристикой. Отличие РФП от НФП является одной из причин появления погрешности измерения.
ФП может быть линейной и нелинейной. Если ФП линейная, то она на графике выражается прямой линией, положение которой определяется двумя точками:
 .
.
Коэффициент a определяет начальное смещение ФП, а коэффициент k определяет наклон ФП.
Коэффициент k называется коэффициентом преобразования.
При проектировании СИ стремятся к тому, чтобы ФП была линейной. Это снижает погрешности преобразования, облегчает сопряжение измерительных преобразователей друг с другом. Кроме того, прибор с линейной ФП имеет равномерную шкалу.
При разработке измерительного прибора должна быть предусмотрена регулировка ФП (регулировка «нуля» и регулировка «чувствительности»).
 Пример регулировок дифференциального трансформаторного преобразователя перемещений приведён на рис. 1.6.
Пример регулировок дифференциального трансформаторного преобразователя перемещений приведён на рис. 1.6.
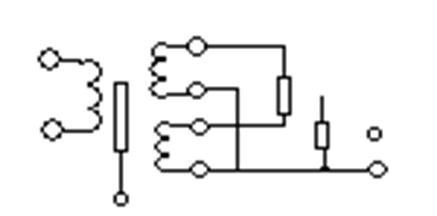
Рис. 1.6
Резистором R1 производится регулировка «нуля», а резистором R2 - регулировка «чувствительности».
1.2.2. Чувствительность
Чувствительность - это производная от ФП по входной величине:
. Чувствительность  .
.
Практически чувствительность определяется как отношение приращения выходной величины к вызвавшему его приращению входной величины:
 .
.
Если ФП линейная, то чувствительность будет постоянной по всему диапазону преобразования и численно равна коэффициенту преобразования.
Чувствительность является размерной величиной. Например, для дифференциального трансформаторного преобразователя перемещений имеем
 .
.
1.2.3. Порог чувствительности
Порог чувствительности - это наименьшее изменение входной величины, при котором начинается изменение выходной величины измерительного преобразователя.
Причиной образования порога чувствительности являются силы трения, механические зазоры, шумы полупроводниковых приборов.
Наличие порога чувствительности приводит к образованию зоны нечувствительности вдоль графика функции преобразования (рис. 1.7).
 |
Рис. 1.7
Различают порог чувствительности по входу ∆ПХ и по выходу ∆ПУ. Так как величины ∆ПХ и ∆ПУ малы, то можно пользоваться зависимостью
 .
.
Наличие порога чувствительности является одной из причин появления погрешности измерения.
1.2.4. Диапазон измерения (преобразования)
Диапазон измерения - это область значений измеряемой величины, для которой нормированы допускаемые погрешности измерения.
Диапазон измерения (преобразования) обычно задается значениями Хн и Хк.
1.2.5. Входной и выходной импеданс
Импеданс - полное сопротивление, учитывающее активную и реактивную составляющие.
Входное и выходное сопротивления учитываются при включении ИП в измерительную цепь, а также определяют нагрузку на объект измерения.
1.2.6. Функция преобразования и чувствительность
измерительного канала при различных способах включения
измерительных преобразований
1. Последовательное включение ИП (рис. 1.8):


 .
.

Рис. 1.8
Функция преобразования всей цепи находится посредством последовательной подстановки ФП:
 .
.
Чувствительность всей цепи
 .
.
При последовательном включении ИП необходимо согласовать диапазоны преобразования и входные и выходные сопротивления.
2.  Параллельные включения ИП (рис. 1.9):
Параллельные включения ИП (рис. 1.9): 
 .
.
Рис. 1.9
Функция преобразования всей цепи
 .
.
Чувствительность всей цепи
 .
.
3.Измерительная цепь с уравновешивающим преобразованием (обратная связь) (рис. 1.10):
 ,
,
- -отрицательная обратная связь;
+ - положительная обратная связь.
 |
Рис. 1.10
При уравновешивающем преобразовании используется отрицательная обратная связь.
Предположим, что ИП1 и ИП2 имеют линейные функции преобразования, тогда

 ,
,
где  - коэффициент преобразования прямого преобразователя ИП1;
- коэффициент преобразования прямого преобразователя ИП1;  - коэффициент преобразования обратного преобразователя ИП2.
- коэффициент преобразования обратного преобразователя ИП2.
Отсюда
, - - для ООС, + - для ПОС;
 ;
;
 ;
;
+ - для ООС, - - для ПОС.
Рассмотрим случай  найдем
найдем  при
при  :
:
 .
.
Вывод. При больших значениях  прямой преобразователь не влияет на функцию преобразования. Учитывая это, можно значительно увеличить точность преобразования.
прямой преобразователь не влияет на функцию преобразования. Учитывая это, можно значительно увеличить точность преобразования.
Аналогично для чувствительности
 : при
: при 
 .
.
4. Графический метод построения результирующей ФП измерительной цепи с отрицательной обратной связью (рис. 1.11):
 |
Рис. 1.11
1)  ;
;
2)  ;
;
3) результатирующая ФП.
1.2.7. Оценка степени нелинейности
функции преобразования
Степень нелинейности ФП оценивается по максимальному отклонению ФП от прямой, соединяющей крайние точки ФП.
1. Графический способ оценки степени нелинейности ФП (рис. 1.12).
 |
Рис. 1.12
1) реальная ФП задается графически;
2) крайние точки ФП соединяются прямой линией;
3) определяется диапазон преобразований по входной  ,
,  и выходной величине
и выходной величине  ,
,  ;
;
4) проводится касательная к ФП (СД и EF), параллельные прямой АВ, и отмечаются точки касания K и L;
5) через точки касания K и L проводятся прямые, параллельные оси У, и отличаются точки пересечения их с прямой АВ - M и N;
6) измеряются отрезки КМ=∆Н1 и LN=∆Н2, характеризующие абсолютные степени нелинейности. Выбирается наибольший отрезок;
7) относительные значения степени нелинейности определяются формулой
 .
.
2. Аналитический способ оценки степени нелинейности ФП:
1) функция преобразования задается формулой и определяется диапазоном преобразования по входной и выходной величинам:


 ;
;
2) определяется уравнение прямой, соединяющей крайние точки ФП:
необходимо определить  и
и  .
.
Коэффициент преобразования
 ,
,
 ;
;
3) определяется производная от ФП по входной величине
 .
.
Эта производная является уравнениями касательных к ФП;
4) полученную производную приравниваем коэффициенту преобразования  , входящему в уравнение прямой
, входящему в уравнение прямой
 .
.
Полученное уравнение решается относительно х. Находятся координаты точек касания по оси Х:  ;
;  (см. рис. 1.12);
(см. рис. 1.12);
5) находятся абсолютные значения степени нелинейности как разности ординат ФП и прямой АВ в точках касания:
 ;
;  .
.
Выбирается наибольшее значение;
6) находится значение относительной степени нелинейности ФП:
 .
.
1.2.8. Способы линеаризации функции преобразования
Наиболее широко применяются три способа линеаризации:
1) линеаризация хордой (рис. 1.13);
 |
Рис. 1.13
2) линеаризация секущей (рис. 1.14);
 |
Рис. 1.14
3) линеаризация касательной (рис. 1.15).
 |
Рис. 1.15
Наименьшее отклонение от реальной функции преобразования обеспечивает линеаризация секущей.
1.3. Динамические характеристики
средств измерений
Динамические характеристики СИ - это характеристики инерционных свойств, от которых зависит быстродействие.
Погрешность измерения, связанная с динамическими характеристиками, называется динамической погрешностью.
Различают полные и частные динамические характеристики. Полные динамические характеристики дают полную информацию о динамике СИ и являются взаимозаменяемыми.
К полным динамическим характеристикам относятся:
1) дифференциальное уравнение;
2) передаточная функция;
3) комплексная частотная характеристика;
4) переходная характеристика;
5) импульсная характеристика.
Частные характеристики определяют только отдельные свойства СИ. Пример частных характеристик:
1) время установления показаний;
2) постоянная времени;
3) степень упокоения;
4) полоса пропускаемых частот и др.
1.3.1. Дифференциальные уравнения
Для описания динамических свойств СИ обычно используются дифференциальные уравнения 1-го и 2-го порядков.
Дифференциальные уравнения составляются на основе законов физики и механики.
Пример 1. Динамика тепловых преобразователей. Если термопреобразователь перенесен из среды с температурой  в среду с температурой
в среду с температурой  , то его температура будет изменяться по определенному закону, описываемому дифференциальным уравнениям 1-го порядка
, то его температура будет изменяться по определенному закону, описываемому дифференциальным уравнениям 1-го порядка
 .
.
Здесь  - тепловая постоянная времени; m - масса; c - удельная теплоемкость; k - коэффициент теплопроводности; s - площадь поверхности преобразователя.
- тепловая постоянная времени; m - масса; c - удельная теплоемкость; k - коэффициент теплопроводности; s - площадь поверхности преобразователя.
Дифференциальное уравнение1-го порядка имеет решение в виде экспоненты
 ,
,
где  ; Т - постоянная времени;
; Т - постоянная времени;  - время переходного процесса (рис. 1.16).
- время переходного процесса (рис. 1.16).
 |
Рис. 1.16
Пример 2. Динамика электромеханических приборов. Конструкция магнитоэлектрического преобразователя (рис. 1.17):
1 - постоянный магнит;
2 - рамка из тонкого провода;
3 - спиральная противодействующая пружина;
4 - гибкие токоподводы;
5 - успокоитель;
6 - отсчетное устройство (шкала и стрелка).
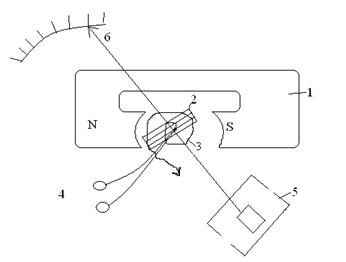
Рис. 1.17
Вращающий момент создается взаимодействием тока рамки с полем постоянного магнита
 ,
,
где В - индукция постоянного магнита;  - площадь рамки;
- площадь рамки;  - число витков рамки;
- число витков рамки;  - измеряемый ток.
- измеряемый ток.
В статике противодействующий момент создается спиральной пружиной
 ,
,
где  - коэффициент жесткости пружины;
- коэффициент жесткости пружины;  - угол поворота рамки и стрелки.
- угол поворота рамки и стрелки.
 , откуда
, откуда  .
.
Эта функция преобразования прибора является статической характеристикой.
В динамике при движении с постоянной скоростью успокоитель создает второй противодействующий момент
 ,
,
где Р - коэффициент успокоения(демпфирования), определяется конструкцией успокоителя;  - скорость вращения рамки.
- скорость вращения рамки.
При движении с ускорением возникает третий противодействующий момент
 ,
,
где  - момент инерции подвижной части прибора;
- момент инерции подвижной части прибора;  - условное ускорение.
- условное ускорение.
На основании закона механики

или
 .
.
Это дифференциальное уравнение, описывающее динамику электромеханического прибора.
Часто это уравнение представляется в другом виде, если ввести обозначения
 ;
;  ;
;  =k,
=k,
где  - период собственных колебаний подвижной части прибора;
- период собственных колебаний подвижной части прибора;  - степень успокоения, важная частная характеристика.
- степень успокоения, важная частная характеристика.
С учетом подстановки получим
 .
.
Решить дифференциальное уравнение - значит найти зависимость
 при заданном изменении тока i
при заданном изменении тока i
Решением однородного дифференциального уравнения второго порядка является функция
 ,
,
где  - корни характеристического уравнения.
- корни характеристического уравнения.
Не решая дифференциального уравнения по значению степени успокоения  можно определить характер переходного процесса.
можно определить характер переходного процесса.
При  - корни характеристического уравнения действительны и характер переходного процесса а периодический.
- корни характеристического уравнения действительны и характер переходного процесса а периодический.
При  - корни характеристического уравнения мнимые, и характер переходного процесса колебательный.
- корни характеристического уравнения мнимые, и характер переходного процесса колебательный.
Например, при скачкообразном изменении тока i стрелка прибора может перемещаться следующим образом (рис. 1.18).
 |
Рис. 1.18
1.3.2. Передаточная функция
 |
Рис. 1.19
Передаточная функция (рис. 1.19) - это отношение преобразования Лапласа выходной величины ИП к преобразованию Лапласа входной величины при нулевых начальных условиях:
 .
.
Преобразование Лапласа выходной величины
 .
.
Преобразование Лапласа входной величины
 .
.
Передаточную функцию можно получить из дифференциального уравнения формальной заменой производных оператором «Р»:
.
Запишем дифференциальное уравнение в операторной форме
 (р)
(р)
или
 +
+  +
+  )=
)=  (р).
(р).
Отсюда
 .
.
Ранее полученное дифференциальное уравнение 1-го порядка для тепловых преобразователей
.
В операторной форме
 .
.
Передаточная функция
 .
.
1.3.3. Комплексная частотная характеристика
Комплексная частотная характеристика определяет зависимость амплитуды и фазы выходной величины ИП от частоты изменения входной величины в виде гармонического воздействия в установившемся режиме (рис. 1.20).
 |
Рис. 1.20
Входная величина  .
.
При 
 Var.
Var.
Выходная величина  .
.
Комплексная частотная характеристика
 .
.
Комплексная частотная характеристика выражается комплексной функцией
 ,
,
где  - действительная часть;
- действительная часть;  - мнимая часть.
- мнимая часть.
На комплексной плоскости функция изображается в виде вектора (рис. 1.21).
 |
Рис. 1.21
Проекции вектора ОА:
 -действительная часть;
-действительная часть;
 - мнимая часть.
- мнимая часть.
При возрастании частоты изменения входной величины конец вектора описывает кривую, которая называется годографом.
Модуль вектора

называется амплитудно - частотной характеристикой (АЧХ).
Функция
называется фазочастотной характеристикой (ФЧХ).
АЧХ и ФЧХ часто рассматриваются раздельно.
Важными параметрами являются неравномерность АЧХ и полоса пропускания частот. Эти характеристики определяются путем замены реальной АЧХ идеализированной прямоугольной АЧХ (рис. 1.22). Здесь ∆g - допустимое отклонение; 0 -  - полоса пропускания частот.
- полоса пропускания частот.
 |
Рис. 1.22
Неравномерность АЧХ обычно оценивается в децибелах.
ФЧХ отражает зависимость сдвига по фазе выходной величины (запаздывание) от частоты изменения входной величины (рис. 1.23).
Рис. 1.23
При наличии резонансных свойств у ИП на АЧХ появляется выброс на резонансной частоте (рис. 1.24). Здесь  - резонансная частота.
- резонансная частота.
 |
Рис. 1.24
Комплексная частотная характеристика может быть получена из передаточной функции формальной заменой оператора «р» на  .
.
Для теплового преобразователя
 ;
;  .
.
Для электромеханического преобразователя
 ;
;  .
.
Общая закономерность - ω находится в знаменателе. С ростом частоты изменения входной величины амплитуда выходной величины уменьшается.
1.3.4. Переходная характеристика
Переходная характеристика - это реакция ИП на входное воздействие в виде единичной функции (рис. 1.25).
 |
Рис. 1.25
x(t)=1(t) - ступенчатая функция (функция Хевисайда) (рис. 1.26).
 | |||
|
Рис. 1.26
1.3.5. Импульсная характеристика
Импульсная характеристика - это реакция ИП на входное воздействие в виде дельта-функции.
х(t)=δ(t) - дельта-функция (функция Дирака) (рис. 1.27), свойства дельта-функции: А→∞,  ;
;  .
.
 |
Рис. 1.27
Переходная и импульсная характеристики связаны между собой преобразованием
 ;
;  ;
;
 - переходная характеристика;
- переходная характеристика;
 - импульсная характеристика.
- импульсная характеристика.
1.3.6. Динамические характеристики
измерительного канала и способы их нормирования
При определении результирующих динамических характеристик измерительного канала удобнее всего оперировать передаточными функциями и комплексными частотными характеристиками.
1. При последовательном соединении ИП (рис. 1.28).
 |
Рис. 1.28
Результирующая передаточная функция

2. При параллельном соединении ИП (рис. 1.29).
 |
Рис. 1.29
Результирующая передаточная функция

3. Измерительный канал с обратной связью (рис. 1.30).
 ,
,
«-» - отрицательная обратная связь;
«+» - положительная обратная связь.
Результирующая передаточная функция
 ,
,
«+»-ОСС; «-»- ПОС.
Рис. 1.30
Динамические характеристики не нормируются. Нормируются коэффициенты дифференциальных уравнений и передаточных функций или частные динамические характеристики.
Например, постоянная времени термометра

или Т не более 0,35 мин.
1.4. Погрешности измерения и их нормирование
Погрешностью измерения называется отклонение результата измерения от истинного значения измеряемой величины: 
Вместо истинного значения, которое, как правило, неизвестно, используется действительное значение, получаемое с помощью образцового средства измерения.
Причины появления погрешностей измерения:
− несовершенство средства измерений;
− несовершенство методов измерений;
− ошибки человека – оператора при считывании показаний прибора.
1.4.1. Классификация погрешностей
по причине возникновения
В зависимости от причины возникновения погрешности измерений подразделяются на следующие классы:
− инструментальные;
− методические;
− погрешности отсчитывания.
Инструментальная погрешность связана с несовершенством средств измерений и, в свою очередь, подразделяется на основную и дополнительную.
Основной называется погрешность СИ при нормальных условиях эксплуатации. Нормальные условия эксплуатации обычно задаются диапазоном возможного изменения влияющих величин, таких, как температура, влажность, атмосферное давление, напряжение питания, уровень вибраций, электромагнитные поля и др.
Дополнительной называется погрешность СИ, появляющаяся при отклонении условий эксплуатации от нормальных.
1.4.2. Классификация погрешностей
по способу числового выражения
По способу числового выражения погрешности подразделяются на три класса:
− абсолютные;
− относительные;
− приведенные.
Абсолютная погрешность - это алгебраическая разность между измеренным и истинным значениями измеряемой величины:
Абсолютная погрешность имеет размерность измеряемой величины.
Относительная погрешность выражается отношением абсолютной погрешности к истинному значению измеряемой величины:
 , или
, или  .
.
На практике истинное значение измеряемой величины заменяется ее измеренным значением:
 .
.
Приведенная погрешность находится как отношение абсолютной погрешности к нормирующему значению измеряемой величины, в качестве которого принимаются максимальное или номинальное значения измеряемой величины:
 или
или  .
.
1.4.3. Классификация погрешностей
по связи их с измеряемой величиной
По характеру связи с измеряемой величиной погрешности подразделяются на 3 класса:
− аддитивная;
− мультипликативная;
− нелинейная.
Аддитивной называется погрешность, абсолютное значение которой не зависит от значения измеряемой величины.
Мультипликативной называется погрешность, абсолютное значение которой прямо пропорционально значению измеряемой величины.
Нелинейная относится к погрешности, абсолютное значение которой связанно с измеряемой величиной нелинейной функции (рис. 1.31).
 |
Рис. 1.31
1.4.4. Классификация погрешностей
по характеру проявления
В зависимости от характера проявления погрешности подразделяются на 3 класса:
− систематические;
− случайные;
− промахи.
Систематической называется погрешность, которая при повторных измерениях одной и той же величины остаётся постоянной или изменяется закономерно.
Случайной называется погрешность, которая при повторных измерениях одной и той же величины измеряется случайным образом, принимая положительные значения.
К промахам или грубым погрешностям относятся погрешности, существенно превосходящее возможные систематические и случайные погрешности. Причиной промахов могут быть ошибки человека (оператора), неисправности прибора, резкие изменения условий их эксплуатации.
Результат измерения, содержащий промах, обычно в расчет не принимается.
В общем случае погрешность всегда является случайной величиной, состоящей из систематической и случайной погрешностей:
 .
.
Систематическая погрешность является математическим ожиданием (центром распределения) общей погрешности измерения.
Полной характеристикой погрешности измерения как случайной величины является функция распределения плотности вероятностей.
Часто бывает трудно разделить общую погрешность измерения на систематическую и случайную составляющие.
1.4.5. Классификация погрешностей
в зависимости от режима работы СИ
В зависимости от режима работы СИ погрешности подразделяются на 2 класса:
1) статические;
2) динамические.
Статическими называются погрешности СИ при установившемся значении измеряемой величины.
Динамическая погрешность определяется как разность между погрешностью СИ в динамическом режиме, когда измеряемая величина изменяется, и статической погрешностью.
1.4.6. Нормирование погрешностей средств измерения.
Классы точности
Нормированием погрешностей СИ называется установление границ погрешностей по всему диапазону измерения.
В настоящее время нормирование погрешностей СИ осуществляется посредством классов точности по правилам, которые установлены стандартом.
1. Границы полосы погрешностей определяются предельным значением реальной погрешности, включающим в себя систематические и случайные составляющие. Пользователь с высокой вероятностью должен быть уверен, что при измерении погрешности СИ не ведут за установленным классом точности границы (рис. 1.32):
 - систематическая погрешность;
- систематическая погрешность;
 - случайная погрешность;
- случайная погрешность;
 - предельная погрешность;
- предельная погрешность;
 .
.
 |
Рис. 1.32
2. Отдельно нормируются основные и все дополнительные погрешности СИ. Классы точности устанавливаются по основной погрешности, включающей в себя систематическую и случайную составляющие.
3. Если границы абсолютной погрешности во всем диапазоне измерения остаются постоянными, т.е преобладает аддитивная погрешность, то класс точности прибора указываются в виде выраженного в процентах приведенного значения этой погрешности:
 ,
,
где - предельное значение погрешности;  - нормирующее значение измеряемой величины, обычно хн = хк …...
- нормирующее значение измеряемой величины, обычно хн = хк …...
Значение γ выбирается из стандартного ряда чисел и указывается на шкале прибора без обозначения процентов:
1,0; 1,5; 2,0; 2,5; 4,0: 5,0: 6,0х10 n,
где n =1,0,-1,-2 и т.д.
Например: 1,5.
Для некоторых приборов, например омметров, у которых нормирующее значение не определено, абсолютная погрешность выражается в единицах длины и относится к длине шкалы. В этом случае число, выражающее класс точности, ставится над скобкой.
 Например:
Например:
4. Если неизменными являются границы относительной погрешности во всем диапазоне измерения, т.е. преобладает мультипликативная погрешность, то класс точности указывается в виде выражений в процентах относительного значения погрешности:
 .
.
 Значение
Значение  выбирается из стандартного ряда чисел и указывается на шкале прибора в кружке.
выбирается из стандартного ряда чисел и указывается на шкале прибора в кружке.
Пример:
5. Для высокоточных приборов и преобразователей, например цифровых, у которых и границы полосы погрешностей должны быть заданы с высокой точностью, используется нормирование погрешностей двучленной формулой, определяющей относительное значение погрешности:
 ,
,
где  - приведенное значение погрешности в конце диапазона измерения, выраженное в процентах;
- приведенное значение погрешности в конце диапазона измерения, выраженное в процентах;  - приведенное значение погрешности в начале диапазона измерения, выраженное в процентах;
- приведенное значение погрешности в начале диапазона измерения, выраженное в процентах;  - конечное значение диапазона измерения;
- конечное значение диапазона измерения;  - измеренное значение.
- измеренное значение.
Числа и выбираются из стандартного ряда чисел и указываются через дробь.
Например: 0,2/0,1.
6. Допускаются и другие способы нормирования погрешностей. Например, погрешность мер длины определяется абсолютным значением, а сами меры в зависимости от погрешности подразделяются на классы и разделы.
Пример: мера длины 10 мм при 5 классе точности имеет погрешность  а при классе точности 00 погрешность
а при классе точности 00 погрешность  .
.
7. Динамическая погрешность не нормируется. Нормируются параметры динамических характеристик. Указываются границы допустимых отклонений или предельные значения этих параметров.
Пример: постоянная времени термометра  или
или 
1.4.7. Нормирование дополнительных погрешностей
Дополнительные погрешности нормируются двумя способами.
1. Указанием пределов допускаемой дополнительной погрешности во всем диапазоне значений влияющей величины.
Пример: температура погрешности в диапазоне  не превышает 2,5%
не превышает 2,5%
2. Указанием функциональной зависимости допускаемой дополнительной погрешности от значения влияющей величины.
Функциональная зависимость может задаваться следующими способами:
а) линейной функцией
 ,
,
где  - влияющая величина;
- влияющая величина;
б) полиномом
 ;
;
в) ступенчатой функцией
 ;
;
г) таблицей или графиком.
Основная и дополнительная погрешности должны быть представлены одним и тем же способом числового выражения.
Если дополнительная погрешность во всем диапазоне влияющих величин составляет менее половины основной погрешности, то она не нормируется.
1.4.8. Способы суммирования погрешностей при определении
результирующей погрешности измерительного канала
Типовая структурная схема измерительного канала имеет вид (рис. 1.33). Здесь ПП - первичный преобразователь; ЛС - линия связи;
НП - нормирующий преобразователь; АЦП - аналого-цифровой преобразователь.
 |
Рис. 1.33
Если известны погрешности каждого преобразователя в отдельном, то возникает задача суммирования этих погрешностей.
Способ суммирования погрешностей зависит от того, насколько представлена информация о погрешностях преобразователей.
В общем случае погрешность преобразователя является случайной величиной, содержащей систематическую и случайную составляющие (рис. 1.34).

Рис. 1.34
Систематическая составляющая  погрешности является математическим ожиданием общей погрешности преобразователя.
погрешности является математическим ожиданием общей погрешности преобразователя.
Как известно, при суммировании случайных величин их математические ожидания складываются алгебраически, а среднеквадратические отклонения складываются квадратично:
 ,
,  .
.
Аналогично поступают и при суммировании погрешностей измерительных преобразователей, включенных в измерительный канал.
На практике не всегда имеется информация о систематических и случайных составляющих общей погрешности.
Рассмотрим некоторые возможные варианты.
1. Погрешности измерительных преобразователей нормированы классами точности без разделения на систематическую и случайную составляющие.
В этом случае погрешность каждого преобразователя принимается как случайная, и суммирование этих погрешностей производится квадратично при условии, что суммирование погрешности не коррелированное.
Например, пределы допускаемых погрешностей каждого преобразователя заданы классами точности. Прием погрешности по диапазонам преобразования могут быть распределены аддитивно и мультипликативно. Необходимо определить класс точности всего измерительного канала.
Для суммирования погрешностей выбирается несколько контрольных точек (не менее 10), равномерно отстоящих друг от друга по диапазону преобразования.
В каждой контрольной точке по классам точности определяется относительная погрешность каждого преобразователя  , где
, где  - номер контрольной точки;
- номер контрольной точки;  - номер преобразователя.
- номер преобразователя.
Относительная погрешность всего измерительного канала в каждой контрольной точке находится по формуле
 ,
,
где K - коэффициент, зависящий от распределения суммарной погрешности и доверительной вероятности Pg.
В большинстве случаев распределение суммарной погрешности неизвестно. Обычно принимают, что результирующая погрешность распределена по нормальному закону. В этом случае для Pg= 0,95 К= 1,1, а для Pg = 0,99 К = 1,4.
На начальном этапе анализа погрешностей можно принять К =1.
Далее по относительной погрешности находится абсолютная погрешность в каждой контрольной точке диапазона преобразования, приведенная ко входу или к выходу измерительного канала, и строится график распределения абсолютной погрешности по диапазону преобразования (рис. 1.35).
 |
Рис. 1.35
По характеру распределения погрешности по диапазону преобразования решается вопрос о способе нормирования суммарной погрешности и задания класса точности.
Например, погрешность, график которой представлен на рис. 1.35, можно считать аддитивной с границами, заданными пунктирной линией. В этом случае класс точности определяется приведенным значением предельной погрешности:
 .
.
2. Для каждого преобразователя измерительного канала указаны границы систематической погрешности  и среднеквадратическое отклонение случайной погрешности
и среднеквадратическое отклонение случайной погрешности 
Выбираются несколько контрольных точек по диапазону преобразования и суммируются в каждой контрольной точке отдельно систематические и случайные погрешности.
Суммирование погрешностей производится по методике, изложенной в книге: Грановский, В.А. Методы обработки экспериментальных данных при измерениях / В.А. Грановский, Т.Н. Сирая. - Л.: Энергоатомиздат, 1990. - С.69-76.
В каждой контрольной точке определяются относительные значения систематической и случайной погрешностей каждого преобразователя.
Доверительная граница систематической погрешности в каждой контрольной точке находится по формуле
 ,
,
где  - коэффициент, зависящий от доверительной вероятности Pg и числа суммируемых погрешностей m (табл. 1.1.);
- коэффициент, зависящий от доверительной вероятности Pg и числа суммируемых погрешностей m (табл. 1.1.);  - значение относительной систематической погрешности j -преобразователя в i -той контрольной точке.
- значение относительной систематической погрешности j -преобразователя в i -той контрольной точке.
Таблица 1.1
| Доверительная вероятность Р |  при числе слагаемых m при числе слагаемых m
| |||||

| Среднее | |||||
| 0,95 | 1,10 | 1,12 | 1,12 | 1,12 | 1,13 | 1,1 |
| 0,99 | 1,27 | 1,37 | 1,41 | 1,42 | 1,43 | 1,4 |
Случайная погрешность считается распределенной по нормальному закону и суммируется по формуле
 ,
,
где  - коэффициент Стьюдента.
- коэффициент Стьюдента.
Зачем находится отношение суммарной относительной систематической погрешности к суммарной относительной случайной погрешности в каждой контрольной точке:
 .
.
Если по большинству контрольных точек выполняется условие  , то систематической погрешностью пренебрегают и в качестве границ суммарной погрешности принимают доверительные границы случайной погрешности.
, то систематической погрешностью пренебрегают и в качестве границ суммарной погрешности принимают доверительные границы случайной погрешности.
Если по большинству контрольных точек выполняется условие  , то пренебрегают случайной погрешностью и принимают в качестве границ погрешностей измерительного канала границы суммарной систематической погрешности.
, то пренебрегают случайной погрешностью и принимают в качестве границ погрешностей измерительного канала границы суммарной систематической погрешности.
При промежуточных значениях Z
 .
.
Необходимо учитывать обе составляющие погрешностей. В этом случае суммарная погрешность определяется выражением
 ,
,
где  - коэффициент, зависящий от
- коэффициент, зависящий от  и доверительной вероятности;
и доверительной вероятности;  - относительная систематическая погрешность всего измерительного канала в i -той контрольной точке;
- относительная систематическая погрешность всего измерительного канала в i -той контрольной точке;  - относительная случайная погрешность всего измерительного канала в i -той контрольной точке.
- относительная случайная погрешность всего измерительного канала в i -той контрольной точке.
Значения берутся из табл. 1.2.
Таблица 1.2
| Pg | при Z
| ||||||||
| 0,8 | 1,0 | 2,0 | 3,0 | 4,0 | 5,0 | 6,0 | 7,0 | 8,0 | |
| 0,95 | 0,76 | 0,74 | 0,71 | 0,73 | 0,76 | 0,78 | 0,79 | 0,80 | 0,81 |
| 0,99 | 0,84 | 0,82 | 0,80 | 0,81 | 0,82 | 0,83 | 0,83 | 0,84 | 0,85 |
При приближенных вычислениях рекомендуется принимать
= 0,85 для Pg=0,99.
3. Для каждого преобразователя измерительного канала указаны математические ожидания и среднеквадратические отклонения систематической и случайной составляющих погрешности и законы их распределения.
В этом случае погрешности суммируются по правилам суммирования случайных величин.
1.4.9. Стандартная экспериментальная оценка
параметров погрешности
1. Определение систематической погрешности в контрольной точке диапазона измерения.
Задается контрольное значение  измеряемой величины в какой - либо точке диапазона измерения с помощью регулируемой образцовой меры или образцового прибора (рис. 1.36). Здесь РИН- регулируемый источник напряжения;
измеряемой величины в какой - либо точке диапазона измерения с помощью регулируемой образцовой меры или образцового прибора (рис. 1.36). Здесь РИН- регулируемый источник напряжения;  - образцовый вольтметр;
- образцовый вольтметр;  - исследуе
- исследуе








