 2015-01-21
2015-01-21 2952
2952Таблица С-1
| Силы | ||||||||
| F1=10 кН | F2=20 кН | F3=30 кН | F4=40 кН | |||||
| Номер условия | Точка приложения силы | α1, град. | Точка приложения силы | α 2, град. | Точка приложения силы | α 3, град. | Точка приложения силы | α 4, град. |
| Н | - | - | - | - | К | |||
| - | - | D | E | - | - | |||
| K | - | - | - | - | E | |||
| - | - | K | H | - | - | |||
| D | - | - | - | - | E | |||
| - | - | H | - | - | D | |||
| E | - | - | K | - | - | |||
| - | - | D | - | - | H | |||
| H | - | - | D | - | - | |||
| - | - | E | K | - | - |
3.5.3. Пример решения задания С-1
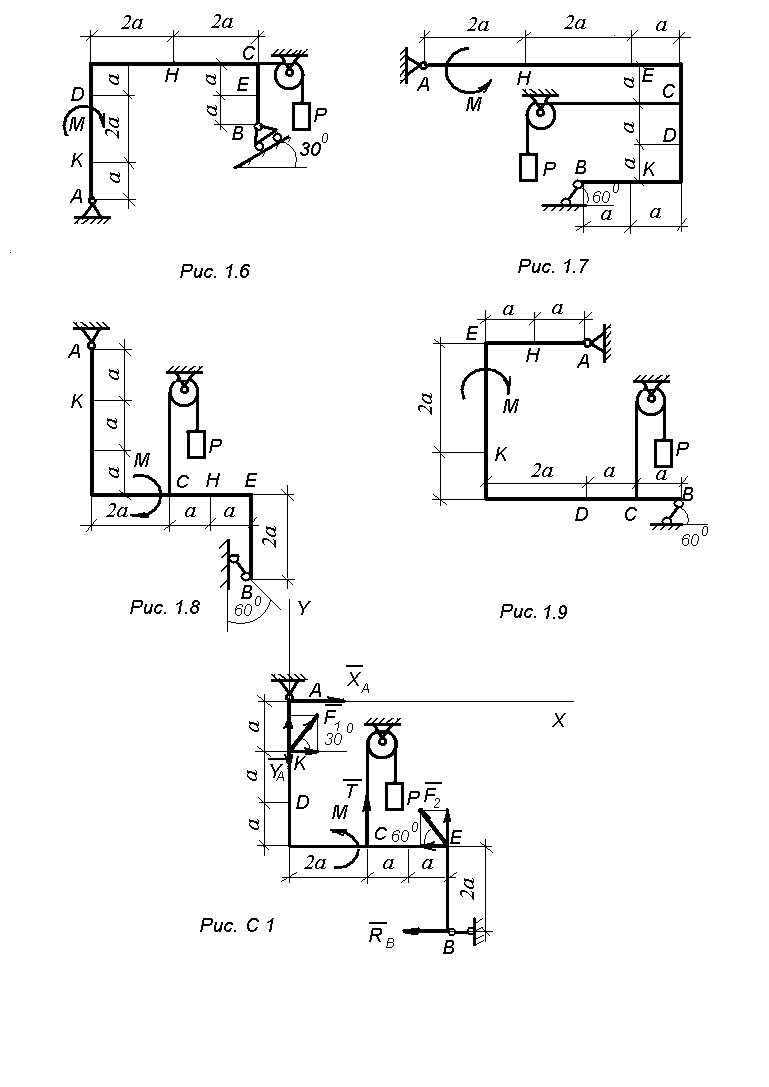
Жесткая рама, расположенная в вертикальной плоскости (рис. С-1), закреплена в точке А шарнирно, а в точке В прикреплена к невесомому стержню.
В точке С к раме привязан трос, перекинутый через блок и несущий на конце груз весом  . На раму действуют: пара сил с моментом М и две сосредоточенные в точках К и Е силы
. На раму действуют: пара сил с моментом М и две сосредоточенные в точках К и Е силы  . В расчетах принять: а = 1м.
. В расчетах принять: а = 1м.
Дано: F1 = 10 кН; F2 = 20 кН; Р=30 кН; М=40 кНм; а=1 м.
Определить: реакции в точках А, В, вызванные заданными нагрузками.
Решение
1. Рассмотрим равновесие рамы (рис. С -1).
2. Изобразим и обозначим все силы, действующие на раму, включая реакции связей:  . Реакцию неподвижной шарнирной опоры в точке А заменим двумя её составляющими, а реакцию в стержне направим по стержню. Следует отметить, что натяжение в тросе по модулю равно силе тяжести груза, закрепленного на его конце: Т=Р.
. Реакцию неподвижной шарнирной опоры в точке А заменим двумя её составляющими, а реакцию в стержне направим по стержню. Следует отметить, что натяжение в тросе по модулю равно силе тяжести груза, закрепленного на его конце: Т=Р.
3. Для полученной плоской произвольной системы сил воспользуемся известным условием равновесия и составим уравнения равновесия:
 4. Подставим в составленные уравнения значения заданных величин и определим искомые реакции.
4. Подставим в составленные уравнения значения заданных величин и определим искомые реакции.
Ответ: XA=30,8 кН; YА= 52,3 кН;RB =29,5 кН.
Модуль реакции в шарнире А равен:  .
.
Проверка: для проверки правильности решения необходимо составить условие равновесия для данной системы сил в новой системе координат.
3.6. Задание С-2. Произвольная пространственная система сил. Определение реакций связей
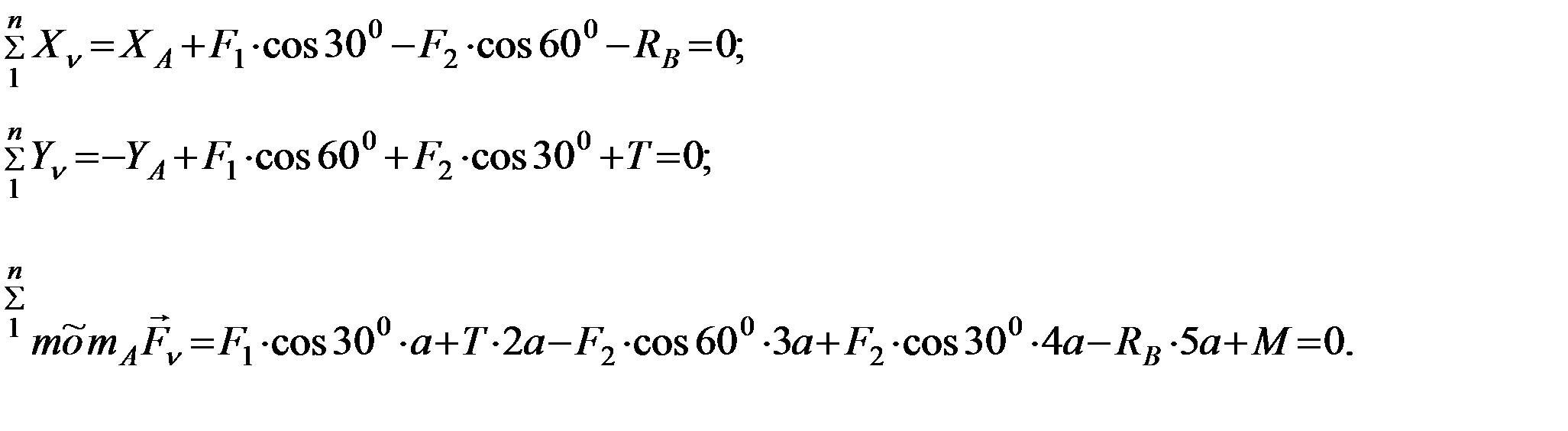
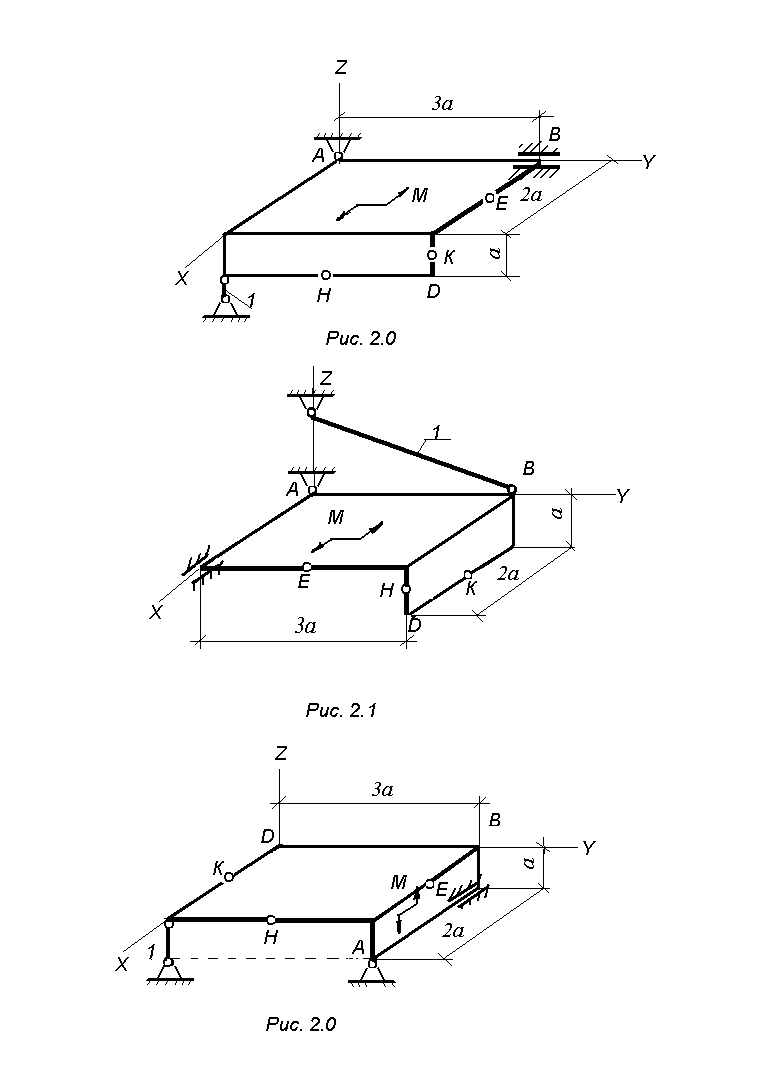
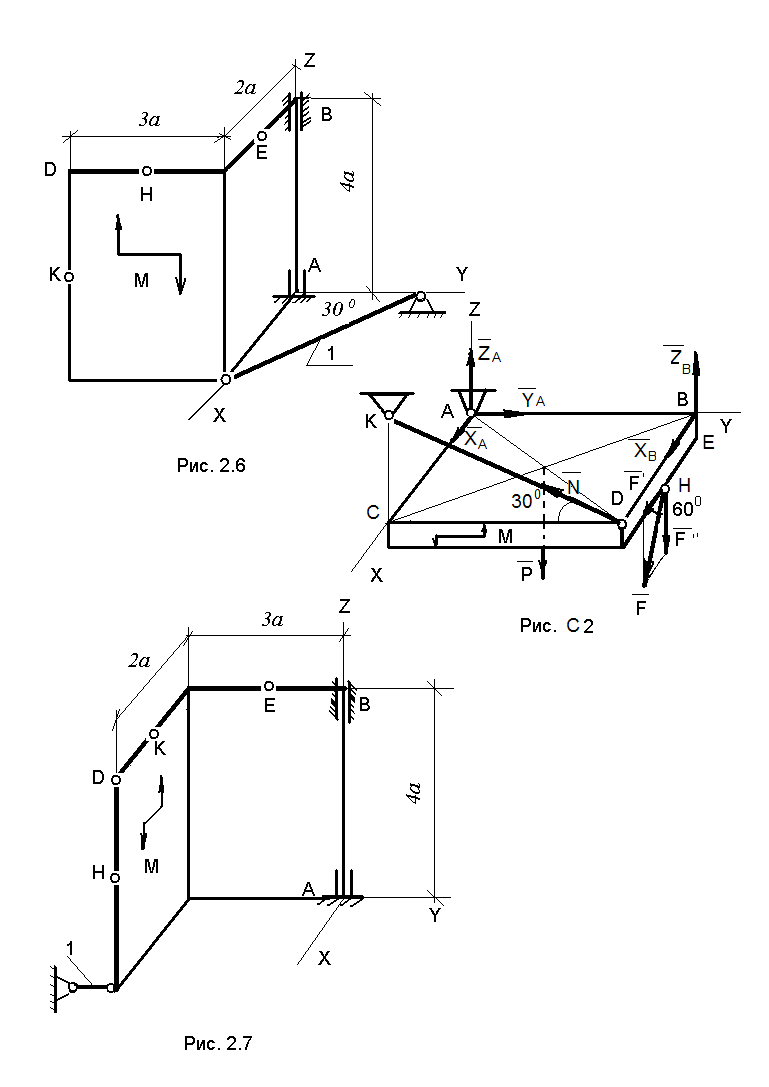
3.6.2. Задание С-2. Дано: две однородные прямоугольные тонкие плиты жестко соединены (сварены) под прямым углом друг к другу и закреплены сферическим шарниром (или подпятником) в точке А, цилиндрическим шарниром (подшипником) в точке В и невесомым стержнем 1 (рис. С 2.0 – С 2.7) или же двумя подшипниками в точках А и В и двумя невесомыми стержнями 1 и 2 (рис. С 2.8, С 2.9). Все стержни прикреплены к плитам и к неподвижным опорам шарнирами.
Размеры плит указаны на рисунках. Вес большей плиты Р1=5 кН, вес меньшей плиты Р1=3 кН. Каждая из плит расположена параллельно одной из плоскостей проекций (π1 - горизонтальной, π2 - фронтальной, π3 - профильной). При расчетах принять а=0,6 м.
На плиты действуют пара сил с моментом М=4 кНм, лежащая в плоскости одной из плит, и две силы. Значения сил, их направления и точки приложения указаны в таблице С-2. Силы F1 и F4 лежат в плоскостях, параллельных плоскости π1; сила F2 – в плоскости, параллельной плоскости π3; сила F3 – в плоскости параллельной плоскости π2. Точки приложения сил (D, E, H, K) находятся в углах или серединах сторон плит.
Определить: реакции связей в точках А, В и реакцию стержня (стержней).
Указания. При решении задачи необходимо учесть, что реакция сферического шарнира (подпятника) имеет три составляющие (по трем координатным осям), а реакция цилиндрического шарнира (подшипника) – две составляющие, лежащие в плоскости, перпендикулярной оси шарнира. При вычислении момента силы её следует разложить на составляющие, параллельные координатным осям.
Таблица С-2
| Силы | ||||||||
| F1=6 кН | F2=8 кН | F3=10 кН | F4=12 кН | |||||
| Номер условия | Точка приложения силы | α1, град. | Точка приложения силы | α 2, град. | Точка приложения силы | α 3, град. | Точка приложения силы | α 4, град. |
| E | H | - | - | - | - | |||
| - | - | D | E | - | - | |||
| - | - | - | - | K | E | |||
| K | - | - | D | - | - | |||
| - | - | E | - | - | D | |||
| H | K | - | - | - | - | |||
| - | - | H | D | - | - | |||
| - | - | - | - | H | K | |||
| D | - | - | K | - | - | |||
| - | - | D | - | - | H |
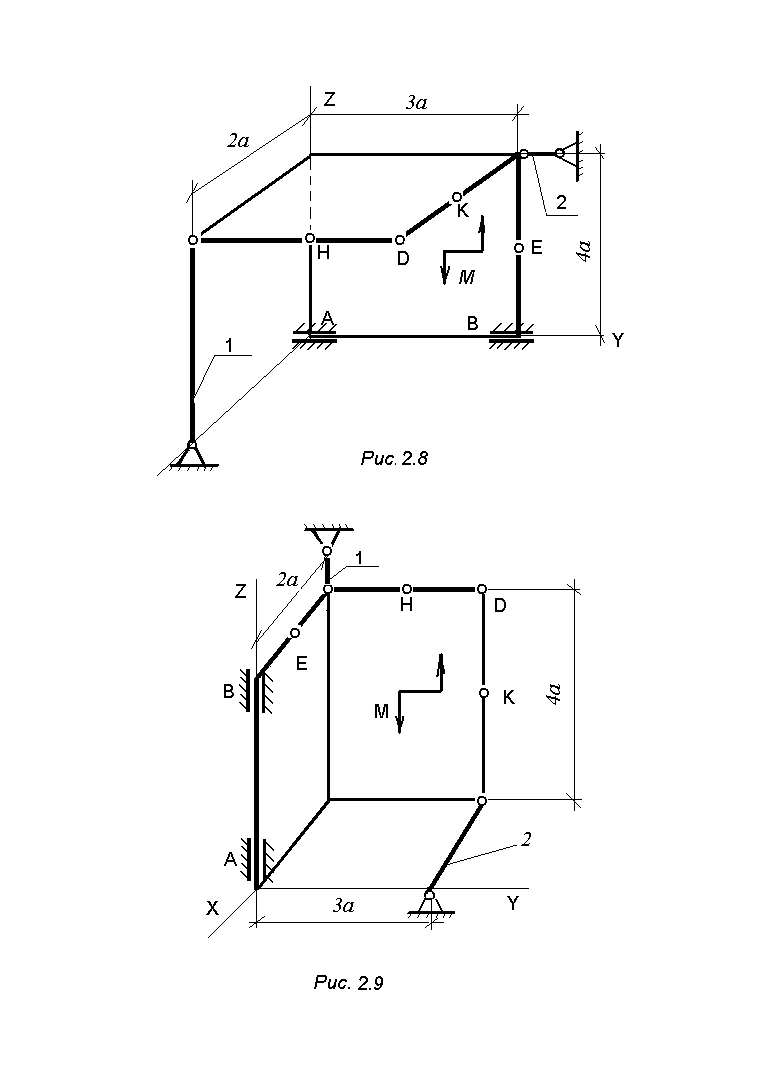
3.6.3. Пример решения задания С-2
Горизонтальная прямоугольная плита весом Р (рис. С-2) закреплена сферическим шарниром в точке А, цилиндрическим шарниром в точке В и невесомым стержнем DK. На плиту в плоскости, параллельной плоскости π3, действует сила F, а в плоскости, параллельной π2, – пара сил с моментом М.
Дано: Р = 3 кН; F = 8 кН; М= 4 кНм; α=60°; АС=0,8 м; ВЕ=0,4 м;
АВ=1,2 м; ЕН=0,4 м.
Определить: реакции в шарнирах А, В и стержне DK.
Решение
1. Рассмотрим равновесие плиты. На плиту действуют заданные силы P, F и пара сил с моментом М, а также реакции связей.
2. Систему координат выбираем таким образом, чтобы её начало совпадало с точкой А, а оси OX, OY были направлены по рёбрам плиты АС и АВ.
3. Реакцию сферического шарнира разложим на три составляющие  , цилиндрического шарнира – на две составляющие
, цилиндрического шарнира – на две составляющие  , принадлежащие плоскости, перпендикулярной оси подшипника. Реакцию N стержня направляем вдоль стержня от D к K, предполагая, что он растянут.
, принадлежащие плоскости, перпендикулярной оси подшипника. Реакцию N стержня направляем вдоль стержня от D к K, предполагая, что он растянут.
4. Для определения шести неизвестных реакций составляем шесть уравнений равновесия пространственной системы сил, действующей на плиту (1-6):
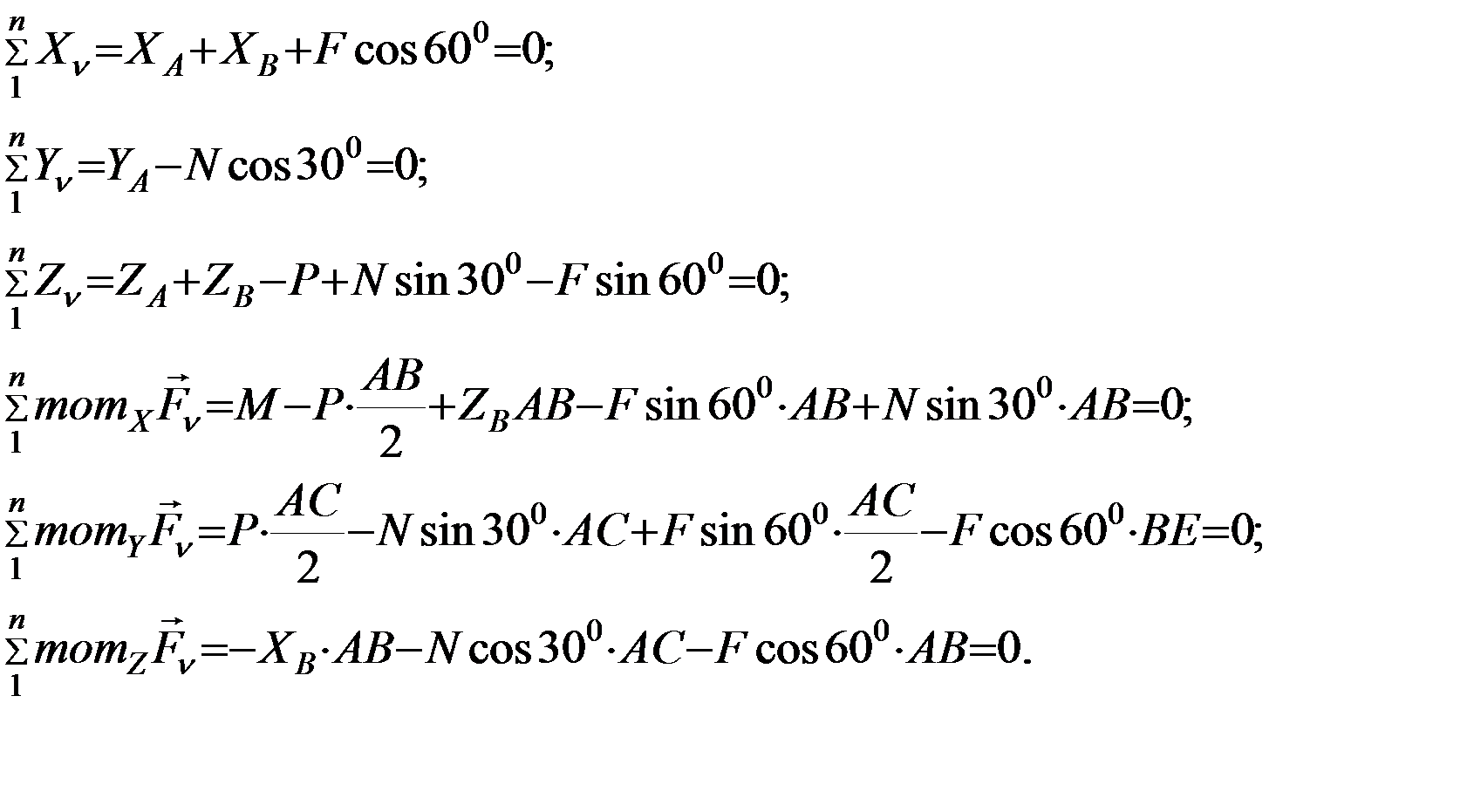
Для определения моментов силы  относительно координатных осей разлагаем её на две составляющие
относительно координатных осей разлагаем её на две составляющие  ,
,  , параллельные осям OX, OY
, параллельные осям OX, OY
( ). Аналогично разложим по осям OY, OZ реакцию
). Аналогично разложим по осям OY, OZ реакцию  в стержне DK. Вычисляя моменты сил относительно координатных осей, следует помнить: момент силы относительно оси равен нулю, если линия действия силы пересекает ось или ей параллельна.
в стержне DK. Вычисляя моменты сил относительно координатных осей, следует помнить: момент силы относительно оси равен нулю, если линия действия силы пересекает ось или ей параллельна.
Подставив в полученные уравнения численные значения всех заданных величин и решив совместно эти уравнения, находим искомые реакции.
Ответ: XA=3,46 кН; YA= 5,18 кН; ZA= 4,80 кН; XВ= -7,46 кН; ZВ= 2,15 кН; N=5,96 кН.
Знак «-» указывает, что истинное направление составляющей силы реакции в точке В противоположно первоначально выбранному (рис. С -2).
Модуль реакции в шарнире А равен:  , модуль реакции в шарнире В равен:
, модуль реакции в шарнире В равен:  .
.
Проверка: для проверки правильности решения необходимо составить условие равновесия для данной системы сил в новой системе координат.
4.1.1. Задание К -1. Определение скорости и ускорения точки по заданным уравнениям её движения
Дано: точка В движется в плоскости XOY. Закон движения точки задан уравнениями: x=f1(t), y=f2(t) (табл. К -1), где x и y выражены в сантиметрах, t – в секундах.
Определить: уравнение траектории точки; для момента времени t1=1с найти скорость и ускорение точки, а также её касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории.
Указания: задача К1 относится к кинематике точки; скорость и ускорение точки в декартовых координатах определяются по формулам координатного способа задания движения точки, а касательное и нормальное ускорения точки - по формулам естественного способа задания её движения.
По предпоследней цифре шифра зачетной книжки выбирается уравнение, задающее изменении координаты X(t), а по последней – Y(t).
В задаче все искомые величины следует определить для момента времени t1=1с.
Таблица К-1
| №№ п/п | x=f1(t) | y=f2(t) | ||
| Для строк 0-2 | Для строк 3-6 | Для строк 7-9 | ||
| 6cos(πt/6) – 3 | 12sin(πt/6) | 2t2+ 2 | 4cos(πt/6) | |
| 4cos(πt/6) | -6cos(πt/3) | 8sin(πt/4) | 6cos2(πt/6) | |
| 2 – 3cos(πt/6) | -3sin2(πt/6) | (2+t)2 | 4cos(πt/3) | |
| t-4 | 9sin(πt/6) | 2t3 | 10cos(πt/6) | |
| 4-2t | 3cos(πt/3) | 2cos(πt/4) | -4cos2(πt/6) | |
| 2-t | 10sin(πt/6) | 2 - 3t2 | 12cos(πt/3) | |
| 2t | 6sin2(πt/6) | 2sin(πt/4) | -3cos(πt/6) | |
| 8sin(πt/6) – 2 | -2sin(πt/6) | (t+1)3 | -8cos(πt/3) | |
| 12sin(πt/6) | 9cos(πt/3) | 2 - t3 | 9cos(πt/6) | |
| 4 – 6sin(πt/6) | -8sin(πt/6) | 4cos(πt/4) | -6cos(πt/3) |
4.1.2. Пример решения К-1
Дано: уравнения движения точки в плоскости XOY:
x=12sin(πt/6), y=4cos(πt/6), где x, y – в сантиметрах, t – в секундах.
Определить: уравнение траектории точки; для момента времени t1=1с найти скорость и ускорение точки, а также её касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории.
Решение:
1. Для определения уравнения траектории точки исключим из данных уравнений движения параметр t:

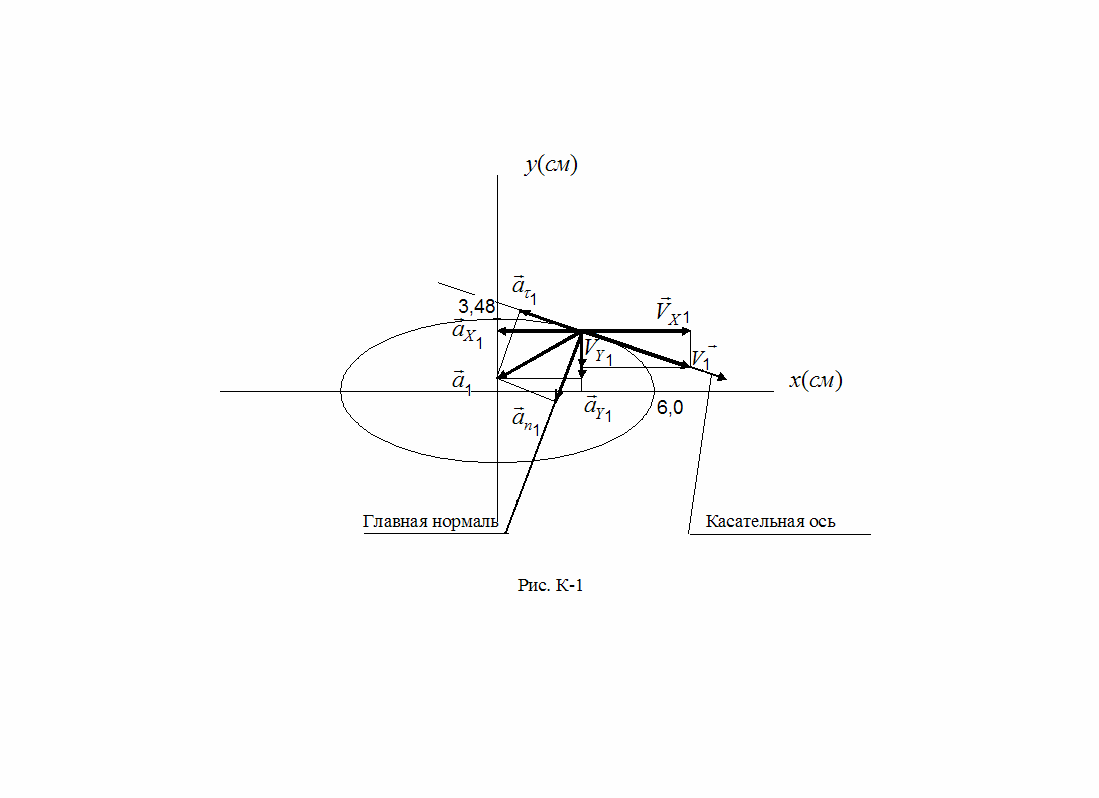
 – уравнение траектории точки – эллипс с полуосями 12 см и 4 см (рис. К -1).
– уравнение траектории точки – эллипс с полуосями 12 см и 4 см (рис. К -1).
2. Определим положение точки на траектории в момент времени t1=1с:
x1=12sin(πt/6)=6(см), y1= 4cos(πt/6)= 3,48 (см).
3. Скорость точки находим по её проекциям на координатные оси:


 , при t1=1с
, при t1=1с 
4. Аналогично найдём ускорение точки при t1=1с:


 , при t1=1с
, при t1=1с 
5. Находим касательное ускорение точки, зная численные значения всех величин, входящих в правую часть выражения:
 при t1=1с
при t1=1с 
6. Нормальное ускорение точки определяем по формуле  , подставляя известные численные значения. При t1=1с получим
, подставляя известные численные значения. При t1=1с получим 
7. Определяем радиус кривизны траектории: ρ=v2/an при t1=1с ρ1=24,93 (см).
Ответ: v1=5,56 (cм/c); a1=1,89 (cм/c2); a1τ=1,43 (cм/c2); a1n=1,24 (cм/c2); ρ1=24,93 (см).
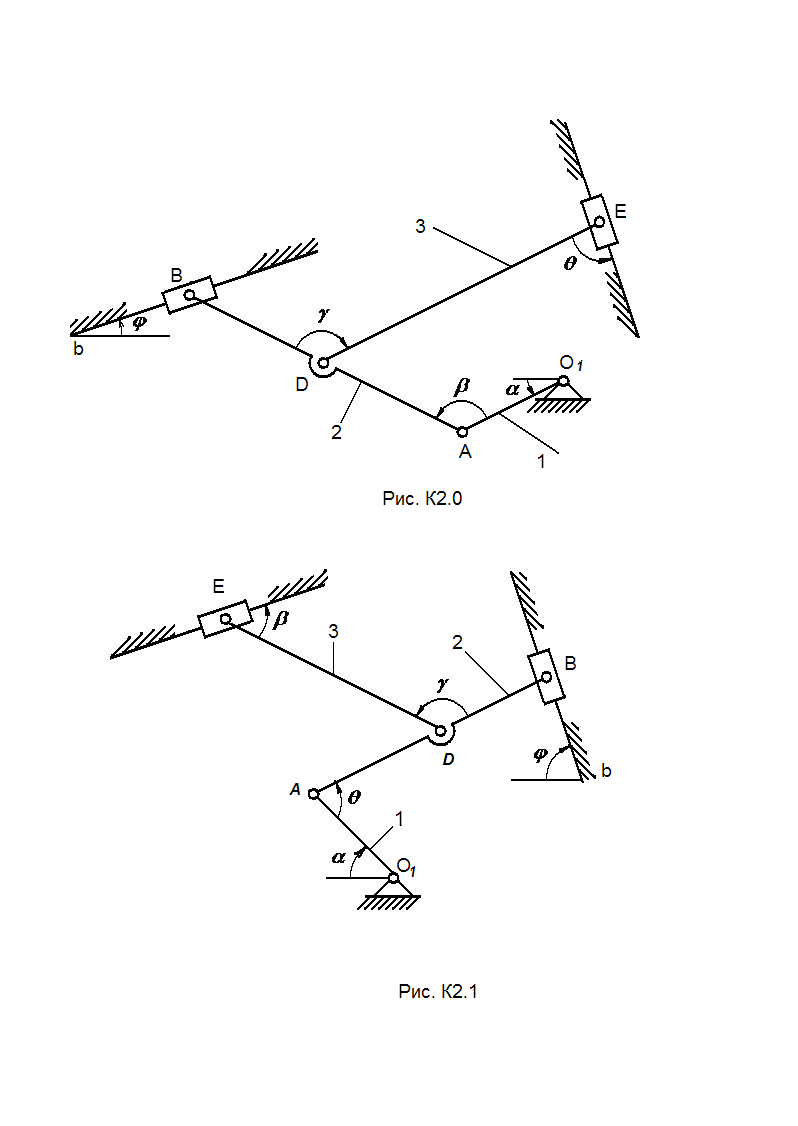
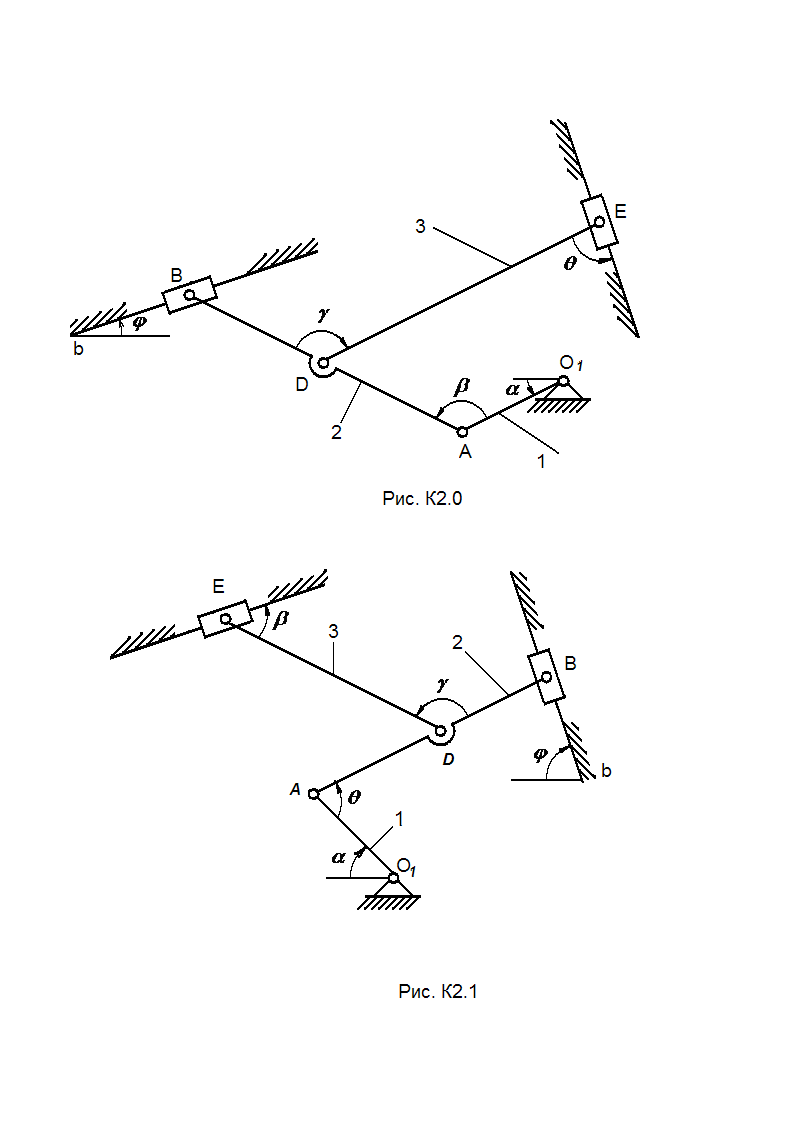
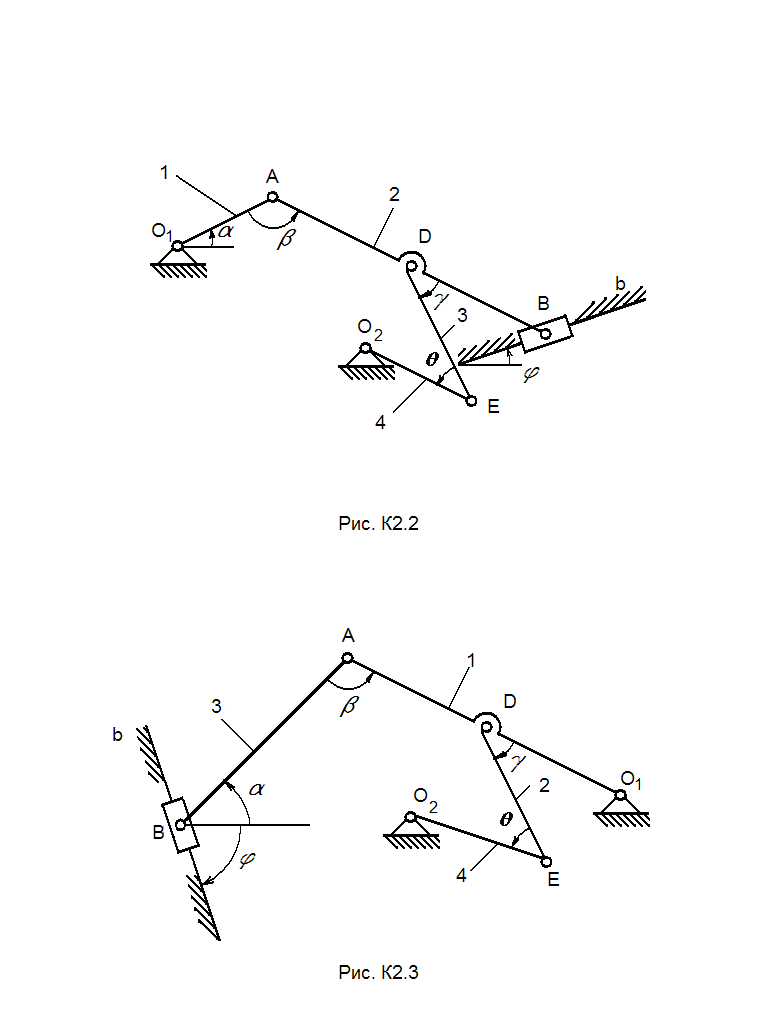
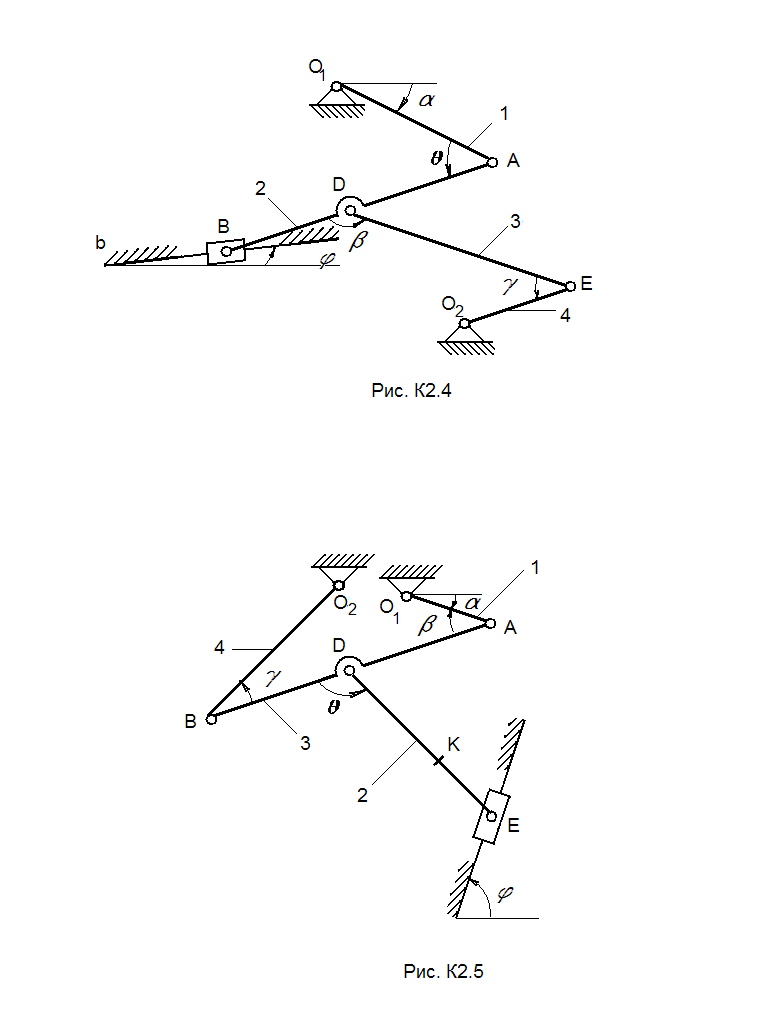
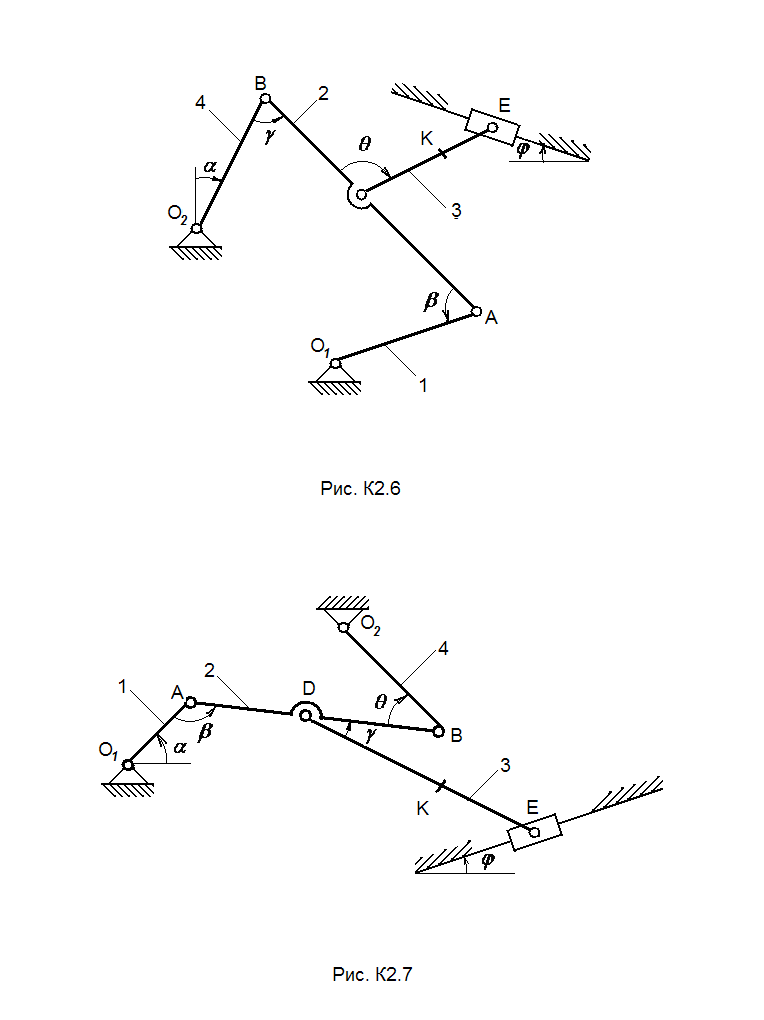
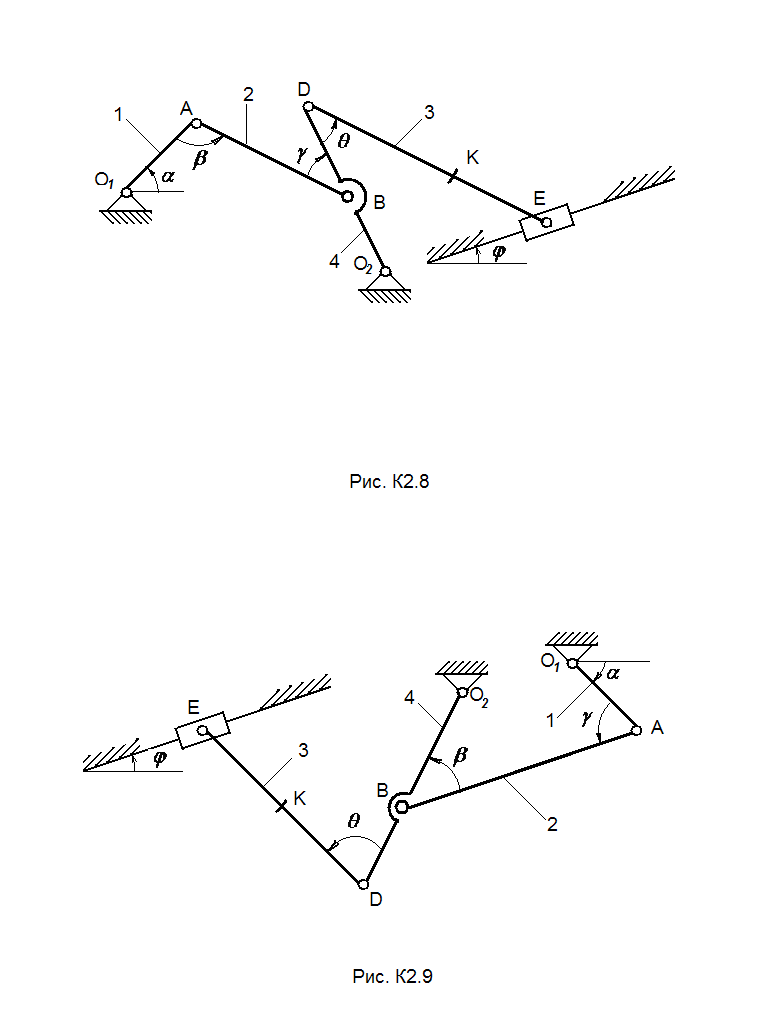
4.2.5. Задание К-2. Определение скоростей и ускорений точек многозвенного механизма
Дано: плоский механизм состоит из 1, 2, 3 и ползунов В и Е (рис. К 2.0 – К 2.1) или из стержней 1, 2, 3, 4 и ползунов В или Е (рис. К 2.2 – К 2.9), соединенных друг с другом и с неподвижными опорами О1, О2 шарнирами; точки D, В и К находятся в серединах соответствующих стержней. Длины стержней равны соответственно: l1=0,4 м, l2=1,2 м, l3=1,4 м, l4=0,6 м. Положение механизма определяется углами: α,β,γ,φ,θ. Значения этих углов и других заданных величин указаны в таблицах К -2.1 (для рис. К 2.0 – К 2.4) и К 2.2 (для рис. К 2.5 – К 2.9); при этом в табл. К - 2.2 ω1, ω4 – величины постоянные.
Определить: скорости и ускорения точек и звеньев плоского механизма, указанные в таблицах в столбцах «Найти».
Указания: построение чертежа следует начинать со стержня, направление которого определяется углом α; дуговые стрелки на рисунках показывают, как при построении чертежа механизма должны откладываться соответствующие углы: по ходу или против хода часовой стрелки.
Заданные угловую скорость и угловое ускорение считать направленными против часовой стрелки, а заданные скорость  и ускорение
и ускорение  от точки В к b (рис. К 2.0 – К 2.4).
от точки В к b (рис. К 2.0 – К 2.4).
При решении задачи для определения скоростей точек многозвенного механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и теоремой о распределении скоростей. При определении ускорений точек механизма следует исходить из векторного равенства  .
.
Таблица К-2.1 (к рис. К 2.0-К 2.4)
| Номер условия | Углы, град. | Дано | Найти | ||||||||||
| α | β | γ | φ | θ | ω1 рад/c | ε1 рад/c2 | V В м/c | aВ м/c2 | V точек | ω звена | a точки | ε звена | |
| - | - | В,Е | АВ | В | АВ | ||||||||
| - | - | А,D | DE | A | AB | ||||||||
| - | - | B,E | DE | B | AB | ||||||||
| - | - | A,E | AB | A | AB | ||||||||
| - | - | B,E | DE | B | AB | ||||||||
| - | - | D,E | DE | A | AB | ||||||||
| - | - | B,E | AB | B | АВ | ||||||||
| - | - | A,E | DE | A | AB | ||||||||
| - | - | B,E | AB | B | AB | ||||||||
| - | - | D,E | AB | A | AB |
Таблица К-2.2 (к рис. К 2.5-К 2.9)
| Номер условия | Углы, град. | Дано | Найти | ||||||||
| α | β | γ | φ | θ | ω1 рад/c | ω4 рад/c | V точек | ω звена | a точки | ε звена | |
| - | В,K | DE | В | АВ | |||||||
| - | А,E | DE | A | AB | |||||||
| - | B,K | AB | B | AB | |||||||
| - | A,E | DE | A | AB | |||||||
| - | D,K | AB | B | AB | |||||||
| - | A,E | AB | A | AB | |||||||
| - | B,E | DE | B | АВ | |||||||
| - | A,K | DE | A | AB | |||||||
| - | D,E | AB | B | AB | |||||||
| - | A,K | AB | A | AB |
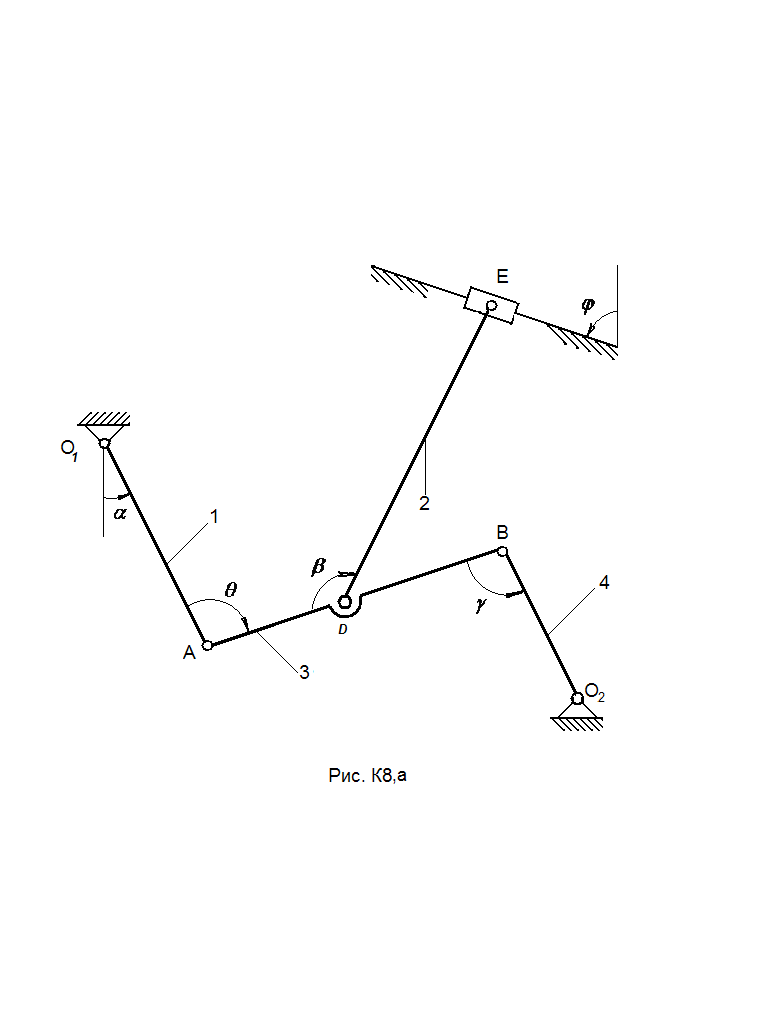
4.2.6. Пример решения К-2
Механизм состоит из стержней 1, 2, 3, 4 и ползуна Е, соединенных друг с другом и с неподвижными опорами О1, О2 шарнирами (рис. К-2).
Дано: l1=0,4 м, l2=1,2 м, l3=1,4 м, l4=0,6 м, α= 30º, β=60º, γ=30º, φ=0º, θ=120º; AD=DB; ω1 = 5 рад/c с направлением - по ходу часовой стрелки.
Определить: vB, vE, aB, ωAB, εAB.
Решение
1. Строим положение механизма в соответствии с заданными углами (рис. К-2, а).
Кинематический анализ:
- звенья О1А и О2В совершают вращательное движение;
- звенья АВ и DE совершают плоскопараллельное движение;
- ползун Е движется поступательно.
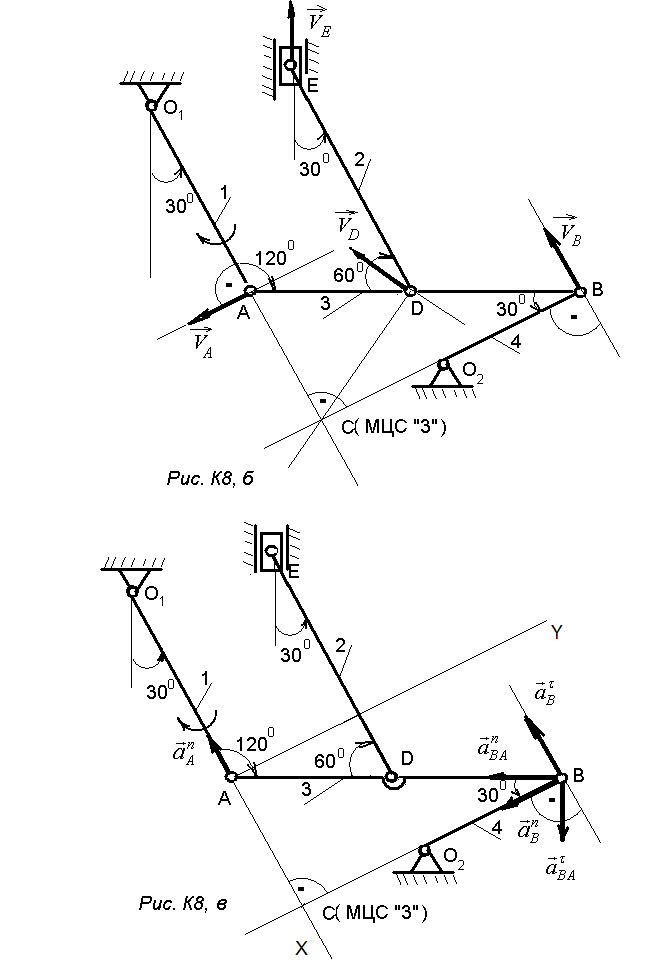
2. Для того, чтобы определить скорость точки В, принадлежащей звену АВ, необходимо найти скорость какой-либо точки этого звена. Такой точкой является точка А, принадлежащая одновременно и звену О1А, совершающему вращательное движение с угловой скоростью ω1 = 5 рад/c по ходу часовой стрелки относительно неподвижного шарнира в точке О1. Точка А движется вместе с кривошипом О1А по окружности радиуса, равного длине звена l1=0,4 м. Скорость точки А может быть определена выражением: vA = ω1l1=5·0,4=2 (м/c). Вектор скорости точки А перпендикулярен звену 1 (О1А) и направлен в сторону вращения кривошипа.
3. На основании теоремы о проекциях скоростей двух точек, принадлежащих телу, совершающему плоское движение, находим направление и модуль скорости точки В:
 ,
,  , vВ = 3,46 (м/с). Вектор скорости точки В перпендикулярен звену 4 (О2В), поскольку точка В вместе со звеном 4 совершает движение по окружности радиуса l4.
, vВ = 3,46 (м/с). Вектор скорости точки В перпендикулярен звену 4 (О2В), поскольку точка В вместе со звеном 4 совершает движение по окружности радиуса l4.
4. Для определения линии действия вектора скорости точки D построим мгновенный центр скоростей (МЦС) звена АВ: МЦСАВ(3) – точка С, лежащая на пересечении перпендикуляров, восстановленных из точек А и В к векторам их скоростей 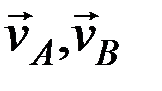 . Вектор скорости точки D перпендикулярен отрезку DС – расстояние от точки D до мгновенного центра скоростей звена АВ, которому точка D принадлежит.
. Вектор скорости точки D перпендикулярен отрезку DС – расстояние от точки D до мгновенного центра скоростей звена АВ, которому точка D принадлежит.
5. Определяем угловую скорость звена АВ: ωАВ(3)= vA / АС, где АС - катет, лежащий против угла равного 300, АС = 0,5·АВ=0,7 (м); ωАВ(3)= 2 / 0,7=2,86 (рад/с).
6. Определяем линию действия, направление и модуль вектора скорости ползуна, принятого за материальную точку Е.
Линия действия вектора  параллельна направляющим ползуна (совпадает с осью ползуна), который движется поступательно. Направление вектора
параллельна направляющим ползуна (совпадает с осью ползуна), который движется поступательно. Направление вектора  и его модуль находим, используя теорему о проекциях скоростей двух точек, принадлежащих одному и тому же телу, совершающему плоское движение:
и его модуль находим, используя теорему о проекциях скоростей двух точек, принадлежащих одному и тому же телу, совершающему плоское движение:
 ,
,  , vE = vD= vA= 2 (м/с).
, vE = vD= vA= 2 (м/с).
7. Определяем  . Точка В принадлежит звену АВ. Чтобы найти её ускорение, необходимо знать ускорение какой-нибудь точки этого звена (полюса) и траекторию точки В. Точка В движется по окружности вместе с кривошипом О2В, и поэтому направление вектора
. Точка В принадлежит звену АВ. Чтобы найти её ускорение, необходимо знать ускорение какой-нибудь точки этого звена (полюса) и траекторию точки В. Точка В движется по окружности вместе с кривошипом О2В, и поэтому направление вектора  заранее известно.
заранее известно.
Ускорение точки В при плоском движении тела равно геометрической сумме ускорения полюса А и ускорения точки В при вращении вокруг полюса А:
 .
.
Разложив векторы ускорений на составляющие по естественным осям, получим следующее векторное равенство:
 .
.
Векторы ускорений будут направлены следующим образом: вектор  – по радиусу О2В к центру О2 окружности; вектор
– по радиусу О2В к центру О2 окружности; вектор  – перпендикулярно О2В в любую сторону; вектор
– перпендикулярно О2В в любую сторону; вектор  – по радиусу О1А к центру О1 вращения; вектор
– по радиусу О1А к центру О1 вращения; вектор  – по радиусу ВА к центру А вращения; вектор
– по радиусу ВА к центру А вращения; вектор  – перпендикулярно ВА в любую сторону. Поскольку по условию задачи точка А, принадлежащая звену О1А, движется равномерно, то её касательное ускорение равно 0
– перпендикулярно ВА в любую сторону. Поскольку по условию задачи точка А, принадлежащая звену О1А, движется равномерно, то её касательное ускорение равно 0  , и поэтому на чертеже вектор
, и поэтому на чертеже вектор  не изображаем.
не изображаем.
8. Спроецируем обе части уравнения на координатные оси X и Y:


9. Определяем  ,
,  ,
,  :
:


10. Подставляя известные значения в уравнения, полученные при проецировании векторной суммы, находим  и
и  :
:  = -1,66 (м/с2),
= -1,66 (м/с2),
 = 20,07(м/с2). Знак «-» означает, что вектор касательного ускорения точки В фактически имеет направление противоположное выбранному в ходе решения задачи.
= 20,07(м/с2). Знак «-» означает, что вектор касательного ускорения точки В фактически имеет направление противоположное выбранному в ходе решения задачи.
11. Находим полное ускорение точки В: 
12. Угловое ускорение звена АВ определяется выражением:
Ответ: vB=3,46(м/с), vE =2(м/с), aB =20,02(м/с), ωAB=2,86(м/с), εAB=14,34(рад/с2).
5.2. Задание Д -1. Динамика материальной точки

