2015-01-21
2015-01-21 433
433В оборудовании третьего поколения — адаптивных микросварочных роботах — была применена система искусственного зрения, полностью автоматизирующая процесс коррекции положения кристалла за счет автоматического сканирования его поверхности и определения координат центров реперных точек. Представителями таких установок являются ОЗУН-12000 МЗ, ЭМ-4020Б для ультразвуковой и ЭМ-4060 для термокомпрессионной сварки выводов. Производительность этого оборудования составляет соответственно 12 000, 14 000 и 28 000 сварок в час. Уникальная производительность установки ЭМ-4060 была достигнута применением развернутого, 3-координатного шагового привода сварочной головки и.электрического разряда для формирования шарика на перемычке.
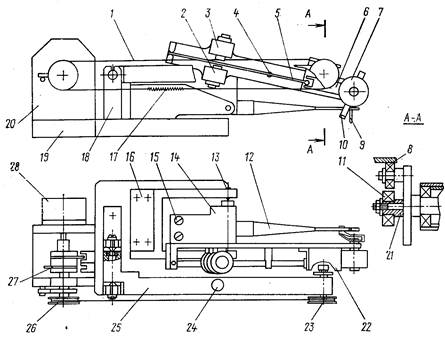
Механизм микросварки изображен на рис. ниже. На основании 19 закреплены кронштейны 16, 18 и 20, на которых смонтированы основные узлы механизма: сварочная головка 14, рычаг механизма подъема 25 и привод механизма подъема.
Привод механизма подъема включает шаговый двигатель 28, приводящий во вращение вал механизма подъема, на котором закреплены лепестки 27, фиксирующие верхнее (холостое) и нижнее (рабочее) положения сварочной головки. На валу механизма подъема закреплен шкив 26, связанный стальным тросиком 1 со шкивом 23, закрепленным на рычаге механизма подъема. Тросик прикреплен к обоим шкивам и делает по их поверхности по полтора витка. Свободные концы тросика стягиваются пружиной 17, таким образом между шкивами образуется кинематически точная связь, позволяющая им совершать один оборот. На фланце вала шкива 23 на втулках 21 закреплены подшипники 8 и 11, взаимодействующие с башмаком 22, прикрепленным к основанию сварочной головки. При этом сварочная головка поворачивается в опорах 13.
Подшипник 8 определяет верхнее исходное положение сварочной головки. При дальнейшем вращении вала с башмаком начинает контактировать подшипник 11, эксцентрично закрепленный на валу и определяющий вертикальные перемещения сварочной головки в процессе приварки проволоки к контактным площадкам кристалла, к выводам корпуса и при образовании петли проволочной перемычки. Управление вращением шагового двигателя и вертикальным перемещением головки осуществляет управляющая микроЭВМ «Электроника 60М».