 2015-02-24
2015-02-24 1509
1509Одной из задач динамики механизмов является определение сил, приложенных к каждому звену и реакций в кинематических парах. Решение этой задачи необходимо для расчета механизма на прочность, определение мощности двигателя, износа трущихся поверхностей, установление типа подшипников и т.д.
В тихоходных машинах силы инерции, возникающие при движении незначительны по сравнению с внешними силами, поэтому ими в большинстве случаев пренебрегают. Силовой расчет, в этом случае, ведется только с учетом статических нагрузок. Для быстроходных машин, в которых силы инерции звеньев сравнимы с внешними силами, необходимо проводить динамический расчет механизма. Для плоских механизмов каждое звено, в общем случае, участвует в плоскопараллельном движении и для динамического расчета механизма необходимо для каждого звена составить систему из двух дифференциальных уравнений, а также задать четыре начальных условия. Если механизм состоит из  звеньев, то получим систему из
звеньев, то получим систему из  дифференциальных уравнений второго порядка, решая которые совместно, можно определить все силы, действующие на механизм. Однако при большом числе звеньев, входящих в механизм, решение этой системы уравнений представляет значительные математические трудности, поэтому на практике применяют метод расчета механизма основанные на принципе Даламбера. Согласно этому методу группа звеньев и механизм в целом находятся в равновесии, если ко всем внешним силам, действующем на него, и реакциям связей, возникающих в кинематических парах, добавить силы инерции, тогда неизвестные силы можно определить методами статики. Уравнения равновесия в этом случае называются уравнениями кинетостатики. Для применения метода кинетостатики необходимо знать массы и моменты инерции подвижных звеньев механизма, а так же законы движения ведущих звеньев для определения сил и моментов инерции. В первом приближении кинетостатический расчет выполняется без учета сил трения в кинематических парах.
дифференциальных уравнений второго порядка, решая которые совместно, можно определить все силы, действующие на механизм. Однако при большом числе звеньев, входящих в механизм, решение этой системы уравнений представляет значительные математические трудности, поэтому на практике применяют метод расчета механизма основанные на принципе Даламбера. Согласно этому методу группа звеньев и механизм в целом находятся в равновесии, если ко всем внешним силам, действующем на него, и реакциям связей, возникающих в кинематических парах, добавить силы инерции, тогда неизвестные силы можно определить методами статики. Уравнения равновесия в этом случае называются уравнениями кинетостатики. Для применения метода кинетостатики необходимо знать массы и моменты инерции подвижных звеньев механизма, а так же законы движения ведущих звеньев для определения сил и моментов инерции. В первом приближении кинетостатический расчет выполняется без учета сил трения в кинематических парах.
7.1 Приведение сил инерции звеньев к каноническому виду
При кинетостатическом методе с учетом ускоренного движения звеньев к каждому подвижному звену механизма дополнительно с внешними силами прикладывается главный вектор
 (7.1)
(7.1)
и главный момент сил инерции
 (7.2)
(7.2)
Где  - масса звена;
- масса звена;
 - вектор ускорения центра масс звена;
- вектор ускорения центра масс звена;
 - угловое ускорение звена;
- угловое ускорение звена;
 - момент инерции звена относительно оси, проходящей через центр масс перпендикулярно плоскости движения.
- момент инерции звена относительно оси, проходящей через центр масс перпендикулярно плоскости движения.
При поступательном движении звена главный вектор сил инерции приложен в центре масс звена и направлен в сторону противоположную ускорению (Рис 7.1а). Главный момент в этом случае равен нулю.
Плоскопараллельное движение. В этом случае движение звена может быть представлено как суперпозиция поступательного движения центра масс с ускорением и вращательного вокруг оси, проходящей через центр масс перпендикулярно плоскости движения с угловым ускорением . Силы инерции в этом случае приводятся к главному вектору сил инерции (7.1), приложенному в центре масс и направленному в сторону противоположному ускорению и главному моменту сил инерции (7.2) направленного против углового ускорения (Рис 7.1б). Как известно из курса теоретической механики, такая система приводится к одной приведенной силе  числено равной главному вектору сил инерции направленной в ту же сторону и расположенной в точке, отстоящей от центра масс на расстояние
числено равной главному вектору сил инерции направленной в ту же сторону и расположенной в точке, отстоящей от центра масс на расстояние  (Рис 7.1б), где
(Рис 7.1б), где
 .
.
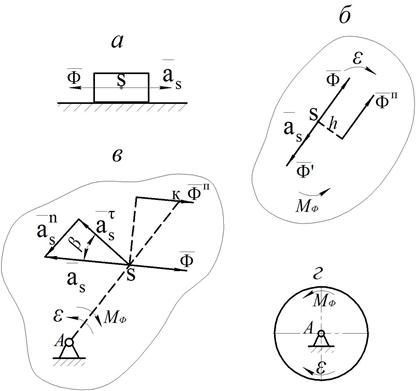
Рис. 7.1
Вращательное движение. Звено вращается вокруг оси, проходящей через точку (.)А (Рис 7.1в,г). В этом случае возможны два варианта.
1) Неуравновешенное звено. Ось вращения не проходит через центр масс (Рис 7.1в). К звену приложены главный вектор сил инерции  расположенный в центре тяжести
расположенный в центре тяжести  звена и главный момент сил инерции
звена и главный момент сил инерции
направленный против углового ускорения . Они приводятся к одной силе инерции  , которая приложена в точке
, которая приложена в точке  ,называемой центром качания звена. Плечо приведенной силы численно равно
,называемой центром качания звена. Плечо приведенной силы численно равно
 .
.
Откуда расстояние от центра масс звена до центра качания будет
 .
.
Сила инерции, являясь динамической нагрузкой, будет вращаться с угловой скоростью звена, создавая переменные нагрузки на вал, подшипники и на фундамент механизма. Момент инерции  не отражается на подшипниках, но вызывает дополнительную динамическую нагрузку на кручение вала.
не отражается на подшипниках, но вызывает дополнительную динамическую нагрузку на кручение вала.
2) Уравновешенное звено. (Рис 7.1г). В этом случае центр масс звена расположен на оси вращения и неподвижен. Следовательно, главный вектор сил инерции равен нулю, а все влияние инерции звена определяется главным моментом сил инерции, который будет создавать дополнительную крутящую нагрузку на вал.








