 2015-02-27
2015-02-27 2277
2277Металлургическое производство характеризуется сложными физико-химическими процессами, протекающими при высоких температурах. Под влиянием различных возмущающих воздействий эти процессы стремятся отклониться от заданных параметров. Для их стабилизации и достижения наиболее высоких технико-экономических показателей в черной металлургии нашло широкое применение автоматическое управление тепловыми и технологическими процессами.
Однако дальнейшее развитие автоматического управления производственными процессами на основе применения вычислительных машин затруднено, так как до настоящего времени нет точного математического описания их динамики, отсутствуют датчики и методы контроля многих параметров процессов. Нет также достаточно надежных вычислительных устройств, удовлетворяющих всем требованиям, которые предъявляются к управляющим машинам.
Действующие доменные печи оснащены автоматическими регуляторами температуры и влажности дутья, давления газа под колошником, а также регуляторами теплового режима воздухонагревателей. Автоматические регуляторы стабилизируют основные параметры доменного процесса, но задания регуляторам устанавливаются вручную.
|
|
|
В настоящее время на доменных печах весь цикл загрузки автоматизирован и выполняется по заданной программе.
Разработаны системы комплексного автоматического контроля и регулирования хода доменной печи. Основное назначение этих систем – форсирование доменной плавки, снижение расходных коэффициентов, а также облегчение и повышение производительности труда.
В систему контроля и регулирования колошниковой зоны печи (Лист 1) входят такие параметры как:
· температура периферийных газов – датчики расположены по окружности на периферийной площадке шахты печи, в количестве 8 штук, в качестве датчиков используются хромель-алюмелевые термопары;
· температура в газоотводах (колошникового газа) – датчики установлены на газоотводах по одному на каждом, т.е в количестве 4 штук, в качестве датчиков используются хромель-алюмелевые термопары;
· температура термозондов 1 и 2 (над уровнем засыпи) – термозонды установлены между периферийной и колошниковой площадками, 1 термозонд установлен с северной стороны, 2 с южной, в каждом термозонде имеются по 8 хромель-алюмелевых термопар различной длины;
· давление колошникового газа – отборы установлены на двух газоотвода, импульсные трассы от которых подведены к помещениям датчиков, регулирование давления колошникового газа осуществляется с помощью исполнительного механизма установленного на дросселе ø 400 мм дроссельной группы, расположенной на газоочистке ГО-5 [4].
|
|
|
Система контроля и регулирования давления колошникового газа доменной печи №5, состоит из следующих средств автоматизации:
· датчик давления – измерительный преобразователь Сапфир – 22М-ДИ;
· вторичный прибор – показывающий и регистрирующий ДИСК-250;
· задатчик;
· регулятор – устройство регулирующее РП4;
· пускатель бесконтактный реверсивный ПБР-2;
· механизм исполнительный электрический однооборотный постоянной скорости МЭО-630.
Датчик давления Сапфир-22М-ДИ обеспечивает непрерывное преобразование значения измеряемого параметра в унифицированный токовый выходной сигнал дистанционной передачи 0-5 mA. Преобразователи предназначены для работы со вторичной регистрирующей и показывающей аппаратурой, регуляторами и другими устройствами, работающими от стандартного выходного сигнала 0-5 mA постоянного тока. Класс точности данного датчика 0,5. Питание датчика 36 В постоянного напряжения и осуществляется от блока питания БП-36 [14].
Измеряемое давление подается в камеру измерительного блока и линейно преобразуется в деформацию чувствительного элемента и изменение электрического сопротивления тензорезисторов тензопреобразователя, размещенного в измерительном блоке.
Электронное устройство преобразователя преобразует это изменение сопротивления в токовый выходной сигнал 0-5 mA.
Чувствительным элементом тензопреобразователя является пластина из монокристаллического сапфира с кремниевыми пленочными тензорезисторами, прочно соединенная с металлической мембраной тензопреобразователя.
Токовый сигнал с Сапфира по линиям связи поступает на вторичный прибор ДИСК-250 и регулятор РП4, включенные последовательно в цепь датчика.
Приборы показывающие и регистрирующие ДИСК-250, предназначены для измерения и регистрации активного сопротивления, силы и напряжения постоянного тока, а также неэлектрических величин, преобразованных в указанные сигналы.
Основная погрешность приборов, выраженная в процентах от нормирующего значения, не выходит за пределы допускаемых значений, равных:
· ± 0,5 – по показаниям и по преобразованию;
· ± 1,0 – по регистрации, регулированию и по сигнализации [13].
Регистрация на диаграммном диске производится непрерывной линией. Ширина линии регистрации не превышает 0,8 мм.
В основу работы прибора положен принцип электромеханического следящего уравновешивания. Входной сигнал от датчика предварительно усиливается и лишь после этого производится уравновешивание его сигналом компенсирующего элемента (реохорда).
Электрическая функциональная схема прибора ДИСК-250 представлена на рисунке 1.1.
В приборе ДИСК-250 входной сигнал от датчика поступает во входное устройство, где он нормализуется по нижнему пределу измерения для удобства его дальнейшей обработки.
Затем сигнал поступает на усилитель УВС с жесткой отрицательной обратной связью, где сигнал нормализуется по верхнему пределу измерения. Таким образом, с выхода УВС снимается сигнал, нормализованный по нижнему и верхнему пределам измерений.
С предварительного усилителя ПУ УВС снимается сигнал, изменяющийся в пределах от 0 до плюс 4 В при изменении входного сигнала от нижнего до верхнего пределов измерений.
Сигнал с реохорда, усиленный усилителем до уровня от плюс 0,5 до плюс 8,5 В, сравнивается на входе усилителя небаланс УН с сигналом УВС. При изменении значения измеряемого параметра на входе усилителя УН появляется сигнал небаланса, который усиливается этим усилителем и управляет работой двигателя ДВ, который, в свою очередь, перемещает ползунок реохорда до тех пор, пока сигнал с усилителя УР не станет равным сигналу с усилителя УВС. Таким образом, каждому значению измеряемого параметра соответствует определенное положение ползунка реохорда и связанного с ним указателя прибора (стрелки).
|
|
|
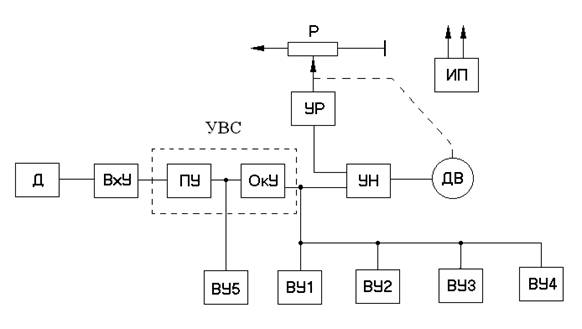
Рис. 1.1 Схема электрическая функциональная прибора ДИСК-250:
Д – датчик; ВхУ – входное устройство; УВС – усилитель входного сигнала (ПУ – предварительный усилитель, ОкУ – оконечный усилитель); УР – усилитель сигнала реохорда; Р – реохорд; ДВ – двигатель; УН – усилитель небаланса; ВУ1 – ВУ5 – выходные устройства; ИП – источник питания
Сопротивление обмотки реохорда для всех градуировочных характеристик и диапазонов измерений одинаково и составляет приблизительно 940 Ом ± 10% [13].
Сигнал с усилителя УВС поступает на входы усилителей выходных устройств ВУ1 – ВУ5.
Питание всех функциональных узлов осуществляется от источника стабилизированного напряжения ИП.
Устройство регулирующее РП4 с импульсным выходным сигналом предназначено для формирования динамических свойств П,ПИ – законов регулирования автоматических регуляторов, содержащих электрические исполнительные механизмы постоянной скорости.
На входы регулятора подаются два сигнала, регулируемого параметра и задания (от задатчика), поступающие на вход сумматора, в котором происходит их алгебраическое суммирование и формируется сигнал рассогласования.
Сигнал рассогласования через масштабирующее устройство поступает на демпфер, представляющий собой инерционное звено RC – звено с регулируемой постоянной времени Тф. С выхода демпфера сигнал рассогласования поступает на вход операционного усилителя-сумматора, с выхода которого поступает на вход трехпозиционного нуль-органа, имеющего регулируемую зону нечувствительности «∆». При сигнале рассогласования, превышающем порог срабатывания устройства регулирующего, нуль-орган срабатывает и скачком подает сигнал в цепь отрицательной обратной связи, представляющей активное инерционное RC – звено и на выходные ключи, коммутирующие цепи внешней нагрузки. При срабатывании соответствующего полярности сигнала рассогласования ключа на выходе появляется напряжение.
|
|
|
Устройство регулирующее РП4 формирует на своем выходе импульсы чередующиеся паузами. Интегрирование этих импульсов при помощи исполнительного механизма постоянной скорости позволяет получить пропорционально-интегральный ПИ – закон регулирования.
Длительность первого импульса t1 (пропорциональная часть) зависит от величины сигнала рассогласования и коэффициента передачи КП инерционного звена.
Интегрирование последующих импульсов tи дает интегральную часть регулятора, которая характеризуется величиной постоянной времени интегрирования ТИ инерционного звена [12].
Управляющий сигнал с выхода регулятора по линиям связи поступает на пускатель бесконтактный реверсивный ПБР-2, который в свою очередь вырабатывает управляющий сигнал на исполнительный механизм МЭО-630.
Напряжение питания для МЭО-630 220 В и частотой 50 Гц [11].
Принцип работы механизмов заключается в преобразовании электрического сигнала, поступающего от регулирующих и управляющих устройств, во вращательное перемещение выходного вала.
Наличие планетарной ступени в редукторе механизмов позволяет использовать ручной привод независимо от включения или выключения электропривода.
Описанная автоматическая система регулирования давления колошникового газа доменной печи №5, работающая в настоящее время, не позволяет осуществлять регулирование с заданной точностью 1% от величины задания. Препятствуют точной работе АСР давления колошникового газа, следующие факторы:
· износ трущихся частей исполнительного механизма и увеличивающийся из-за этого люфт на рычаге МЭО-630;
· недостаточный момент на валу двигателя исполнительного механизма (питание 220В) из-за износа регулирующего органа;
· регулятор РП4 вырабатывает управляющее воздействие по ПИ – закону регулирования, что бывает недостаточно при нестабильной работе печи для точного регулирования;
· при наложении всех перечисленных выше факторов перерегулирование составляет 1,3-2,1%, что неприемлемо для устойчивой работы печи [4].
Также оказывает негативное влияние и то обстоятельство, что оборудование является морально устаревшим и выработавшим свой рабочий ресурс времени.
1.2.3 Обоснование выбора варианта АСР давления








