 2015-02-14
2015-02-14 479
479ЕКСПЕРИМЕНТАЛЬНЕ ВИПРОБУВАННЯ З МОДЕЛЮВАННЯ ЗІТКНЕННЯ АВТОМОБЫЛЯ ТА ПІШОХОДА
Проведення експериментальної частини досліджень пов’язано з визначенням дистанції відкидання пішоходу в дорожньо-транспортній пригоді за участю пішоходу та автомобіля з системами пасивної безпеки.
Випробування проводиться в дорожніх умовах шляхом багаторазового зіткнення з манекеном для отримання відстані відкидання жертви.
Дорожні випробування
Для дорожніх випробувань у якості базового автомобіля використовувався передньопривідний легковий автомобіль ZAZ Tavria Nova 1.2 MT 110247.40 в стандартній комплектації.
Таблиця 5.1 – Технічна характеристика ZAZ Tavria Nova 1.2 MT 110247.40
| Характеристика | Назва | Показник |
| Двигун | Об’єм двигуна,куб. см | |
| Кількість циліндрів | ||
| Кількість клапанів | ||
| Потужність, к.с. при об/хв | 62,40 при 5300-5500 | |
| Крутний момент, Нм при об/хв | 90,20 при 3000 | |
| Система живлення | Розподілене впорскування | |
| Паливо | Бензин |
Продовження таблиці 5.1
| Габаритні розміри, маса та об’єми | Довжина, мм | |
| Ширина, мм | ||
| Висота, мм | ||
| Колісна база, мм | ||
| Кліренс, мм | ||
| Споряджена маса, кг | ||
| Повна маса (максимально допустима), кг | ||
| Об'єм багажника, л | ||
| Об'єм паливного бака, л | ||
| Трансмісія | Коробка передач | Механічна |
| Число передач | ||
| Тип приводу | Передній | |
| Рульове управління | Діаметр розвороту, м | 10,40 |
| Ходова частина | Гальма передні | Дискові |
| Гальма задні | Барабанні | |
| Шини | 155 / 70R13 | |
| Витрата палива і токсичність | Міський цикл, л / 100 км | 7,10 |
| Заміський цикл, л / 100 км | 5,30 | |
| Норми токсичності Euro | Euro II | |
| Динамічні характеристики | Максимальна швидкість, км / год | |
| Час розгону до 100 км / год, с | 15,90 |
На даному автомобілі було знято капот, передній бампер, фари та решітку радіатора для того, щоб встановити конструкцію, котра імітує передню частину автомобіля з пішохідною подушкою безпеки. Також був розроблений манекен, котрий імітує пішохода.
Під час проведення експерименту необхідно визначити дистанцію відкидання манекена для розрахунку швидкості наїзду на нього.
Експеримент проведено на ділянці для випробувань кафедри «Автомобілі» ЗНТУ.
Конструкція передньої частини автомобіля
Система пішохідної подушки безпеки являється новим інженерним рішенням для зменшення травматизму пішохода під час ДТП, яке вперше з’явилося на серійному автомобілі в 2012 році. Наїзд автомобіля з даною системою пасивної безпеки на пішохода легко піддається експертній оцінці. Але виникає необхідність перевірити правильність результатів, тому що подушка безпеки поглинає значну кількість енергії удару. Відповідно, пішохід відкидається на меншу відстань. Тому в результаті експертизи виникне значна похибка в отриманій швидкості наїзду на пішохода – вона буде меншою.
Для перевірки даного питання було побудовано конструкцію, котра імітує систему пішохідної подушки безпеки, та манекен. Загальний вигляд конструкції зображено на рисунку 4.1. Основними елементами системи являються: несуча рама, площадка зі змінним кутом нахилу, пружний елемент, датчикові апаратура.
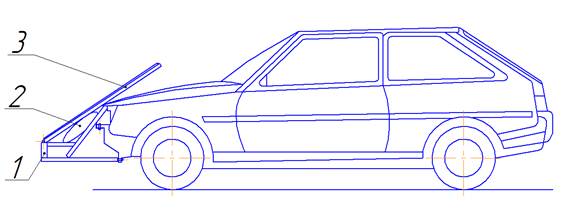
1 – несуча рама; 2 – пружній елемент; 3 – площадка зі змінним кутом нахилу Рисунок 5.1 – Схема конструкції, котра імітує передню частину автомобіля з пішохідною подушкою безпеки

Рисунок 5.
Таблиця 5.2 – Геометричні параметри конструкції
| Параметр | Значення |
| Ширина площадки, мм | |
| Довжина площадки, мм | |
| Кут нахилу площадки в робочому стані, град |
В лабораторії кафедри «Автомобілі» ЗНТУ було побудовано манекен, який імітує пішохода. Він має кінцівки, які обертаються на шарнірних опорах. На рисунку 5.2 зображено загальний вид манекена, а в таблицю 5.2 зведено основні його характеристики.

Рисунок 5.2 – Загальний вигляд манекена
Таблиця 5.3 – Характеристика манекена
| Показник | Значення |
| Висота, мм | |
| Ширина, мм | |
| Глибина, мм | |
| Центр мас, мм | |
| Вага, кг |
Розроблена конструкція працює наступним чином:
При зіткненні з пішоходом площадка 3 приймає на себе удар і передає імпульс на пружний елемент 2 (імітуючий подушку безпеки), метою якого є зменшення цього імпульсу. В результаті чого скорочується відстань, на яку відкидається манекен. На площадці 3 закріплений акселерометр STEVAL-MKI062V2 iNEMO, за допомогою якого замірюється прискорення, з яким манекен контактує при ударі, за рахунок чого визначаємо силу удару.
5.2.1 Випробувально-інформаційний комплекс
STEVAL-MKI062V2 iNEMO - демонстраційна плата на базі 32-бітного ARM Cortex-M3 мікроконтролера STM32F103RE. У складі плати є: датчик температури, тиску, 2-координатний гіроскоп, 1-координатний гіроскоп, 6-координатний геомагнітний модуль. Крім того є слот для карт пам'яті і конектори для підключення модулів дротового і бездротового зв'язку (USB, ZigBee, GPS). Дана демонстраційна плата - це друга версія модуля STEVAL-MKI062V1 iNEMO, у більш компактному виконанні: розміри плати 40 × 40 мм.
Для розробки є бібліотека вбудованого програмного забезпечення, а також програмна оболонка для ПК з графічним інтерфейсом відображає значення всіх встановлених на плату датчиків.
Система інерційних вимірювань з 10 ступенями свободи являє собою апаратну платформу для безлічі додатків: ігри, робототехніка, системи моніторингу стану пацієнтів, портативні прилади навігації, системи віртуальної реальності.
Основні особливості:
- Встановлений мікроконтролер STM32F103RE
- ядро Cortex-M3, робоча частота 72 МГц
- 512 КБ Flash-пам'яті програм, 64 КБ SRAM
- 12 канальний DMA контролер
- три 12-бітних АЦП;
- вбудований температурний сенсор;
- два 12-бітових ЦАП;
- чотири 16-бітних таймера, два 16-бітових ШІМ для керування двигуном, два сторожових таймера, два 16-бітових таймера для ЦАП
- комунікаційні інтерфейси: USB 2.0, CAN, до 5 інтерфейсів USART (режими ISO7816, LIN, IrDa), 3 × SPI, 2 × I2C, SDIO
- до 112 ліній вводу / виводу
- рівень питомого енергоспоживання мікроконтролера - 0.19 мВт / МГц
- споживаний струм на частоті 72 МГц становить 27 мА
- Живлення можливо від зовнішнього джерела або від USB порту;
- встановлений стабілізатор напруги 3.3 В з вихідним струмом 800 мА;
- встановлений кварцовий резонатор на 8 МГц і 32768 Гц;
- 1-координатний гіроскоп LY330ALH;
- 2-координатний гіроскоп LPR4030AL;
- 6-координатний геомагнітний модуль LSM303DLH (акселерометр, магнетометр);
- датчик тиску LPS001DL з інтерфейсом I2C;
- датчик температури STLM75DS2F з інтерфейсом I2C;
- конектори для модулів бездротового зв'язку;
- слот для карт пам'яті microSD;
- високошвидкісний USB інтерфейс;
- коннектор RS232;
- користувальницькі кнопки і світлодіоди
- розміри плати 40 × 40 мм
5.3 Програма дорожніх випробувань
Об’єкт випробувань. Автомобіль з випробуваною системою.
Мета досліджень. Визначити дистанцію відкидання пішохода при зіткненні з автомобілем під час ДТП.
Процедура випробувань. Випробувально-інформаційний комплекс, обладнаний системою пасивної безпеки, готувався до випробувань при температурі зовнішнього середовища 5оС. Проведення досліджень проводилось у відповідності з вимогами НТД, робочої методики МЕТ 04.001.99 та ДСТУ UN/ECE R13-09-2002.
Умови проведення. Температура навколишнього середовища 5оС. Швидкість вітру не більше 5м/c.
Під час дорожніх випробувань оцінювались наступні експлуатаційні показники:
- початкова швидкість гальмування;
- шлях гальмування та розгальмування;
- гальмівний шлях;
- усталене сповільнення;
- параметри відкидання манекена.
5.4 Послідовність проведення експерименту
1. Сісти в автомобіль;
2. Завести двигун;
3. Прогріти двигун до температури 900С;
4. Перевірити справність гальмівної системи;
5. Вигнати автомобіль на початкову точку розгону;
6. Встановити манекен на відстані 50 м від автомобіля;
7. Під’єднати датчикову апаратуру до комп’ютера;
8. Розігнати автомобіль до швидкості 15 км/год;
9. Збити манекен;
10. Зупинити автомобіль;
11. Поміряти відстань відкидання манекена;
12. Повторити випробування 3 рази;
13. Обробити отримані результати дослідження.
5.5 Проведення випробування
Експеримент проведено на ділянці для випробувань кафедри «Автомобілі» ЗНТУ. Експеримент було проведено 5 разів при різних швидкостях та жорсткості конструкції. В ході проведення досліду було встановлено, що манекен проходить три стадії під час зіткнення з автомобілем, що відповідає стадіям, зображеним на рисунку 3.2:
1. Sс – відстань, яку долає пішохід до повного контакту з автомобілем, м;
2. Sв – відстань, яку долає пішохід від моменту зіткнення до контакту з землею, м;
3. Sю – відстань від точки контакту пішохода з землею до моменту зупинки, м.
Результати випробувань було зведено в таблицю 5.4
| № | Швидкість руху автомобіля, Va, м/с | Жорсткість конструкції | Sс, м | Sв, м | Sю, м | Загальна відстань, Sп, м |
| нежорстка | 0,91 | 4,25 | ||||
| нежорстка | 0,5 | 1,5 | ||||
| жорстка | 2,7 | 0,7 | 1,8 | 5,2 | ||
| нежорстка | 2,05 | 0,6 | 2,65 | 8,2 | ||
| жорстка | 1,3 | 1,5 | 2,8 | 7,3 |

Рисунок 5.3 – Момент удару манекена автомобілем

Рисунок 5.4 – Початок польоту манекена

Рисунок 5.5 – Початок ковзання манекена

Рисунок 5.6 – Повна зупинка манекена
Висновки:








