 2015-02-24
2015-02-24 752
752В момент пуска двигателя противо-ЭДС в обмотке якоря равна нулю и пусковой ток определится:
Iп = U / Rя.
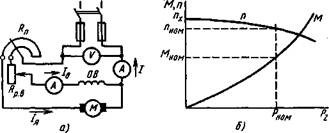
| Рис. 28.1. |
 |
Внутреннее сопротивление обмотки якоря машины невелико. У двигателей средней и большой мощности оно имеет величину порядка десятых-сотых долей Ома. При прямом включении двигателя в сеть пусковой ток достигает (10-15) Iн. Поэтому прямой пуск двигателя недопустим. Такой большой пусковой ток опасен для двигателя и сети. Напряжение в сети может значительно снизиться, кроме того, возникнет толчок момента, действующего на передачу и рабочий механизм.
Для ограничения силы пускового тока последовательно с обмоткой якоря включают пусковой реостат Rп (рис.28.1.). Тогда ток
I1п = U / (Rя + Rп)
Сопротивление пускового реостата выбирают таким образом, чтобы сила пускового тока не превышала номинального значения силы тока якоря в 2-2,5 раза.При пуске двигателя регулировочный реостат в цепи возбуждения полностью выводится, чтобы обеспечить максимальное значение силы тока в цепи возбуждения и магнитного потока статора, что обеспечивает плавный пуск двигателя при достаточном вращающем моменте якоря для преодоления механического сопротивления.
По мере увеличения частоты вращения двигателя растет противодействующая ЭДС якоря, которая направлена против подведенного напряжения и ток снижается, поэтому сопротивление пускового реостата постепенно уменьшают до нуля. Пусковой реостат включается на 2-3 с и не рассчитан на длительное протекание тока. Двигатели мощностью до 1 кВт имеют сравнительно большое сопротивление якоря, поэтому их включают без пусковых реостатов.
32. Регулирование частоты вращения и реверсирование двигателей с параллельным возбуждением.
Рассмотрим способы регулирования частоты вращения двигателя при неизменном тормозном моменте на валу. Из формулы частоты вращения
n = (U – Iя Rя) / (СЕ Ф)
видно, что регулирования частоты вращения двигателя постоянного тока можно осуществлять следующими способами:
1. Изменением приложенного напряжения. Этот способ применяется редко, так как с изменением напряжения изменяется и магнитный поток машины, а при малых напряжениях можно размагнитить машину.
2. Изменением потока возбуждения Ф. Из формулы частоты вращения следует, что частота вращения обратно пропорциональна магнитному потоку. Пока магнитная система машины не насыщена, поток можно считать пропорциональным силе тока возбуждения 1в. Следовательно, частоту вращения двигателя можно регулировать изменением силы тока возбуждения, для чего в цепь возбуждения вводится регулировочный реостат (рис.29.1). С увеличением сопротивления Rвуменьшается сила тока возбуждения Iв, вследствие чего уменьшается поток Ф. Уменьшение потока возбуждения ведет к увеличению частоты вращения.
Таким образом, изменением потока возбуждения можно регулировать частоту вращения двигателя только в сторону увеличения. При значительном уменьшении силы тока возбуждения (особенно при обрыве цепи возбуждения) сила тока якоря и частота вращения ненагруженного
| Рис. 29.1. |
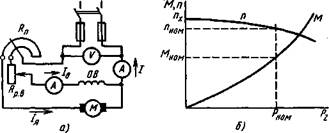 |
двигателя сильно возрастают, что может привести к опасным механическим повреждениям. Это явление не допустимо, поэтому двигатель должен быть снабжен автоматической защитой, отключающей его от сети при предельном уменьшении потока (ниже 1/ЗФн).
Регулирование «на уменьшение потока», называемое еще полюсным регулированием, весьма распространено, так как оно экономично и удобно в связи с тем, что сила тока возбуждения мала и мощность потерь в реостате мала.
3. Изменением величины сопротивления цепи якоря Rя. При этом способе регулирования, при Ф = const, последовательно с обмоткой якоря включается регулировочный реостат. Достоинством этого способа является возможность плавного регулирования частоты вращения от нуля до номинального значения, а недостатком большие потери энергии на регулировочном сопротивлении так как через регулировочный реостат проходит весь ток якоря.
Для реверсирования двигателей постоянного тока достаточно поменять направление тока или в обмотке возбуждения или в обмотке якоря. При изменении полярности источника питания направление вращения не меняется.








