 2015-03-22
2015-03-22 1005
1005(ВВЕДЕНИЕ)
Навигационные системы (навигационные устройства), технические системы которые используются для решения задач навигации.
К задачам любого летательного аппарата относятся своевременное определение местоположения и направления движения путем измерения скорости, расстояния и времени, при полете из одной точки в другую.
Каждое воздушное судно (ВС), следует по определенной траектории т.е полета самолета трех измерениях в воздушной среде от взлета до посадки.
В аэронавигации используют две проекции траектории полета получивших название соответственно профиль и путь полета самолета (вертолета).
Профиль полета траектория полета в вертикальной плоскости, показывающая изменение относительной высоты самолета.
Типовой профиль полета (Рис. 1.1) включает семь этапов: Предполётный, Взлетный, Вылет самолёта, Полет по маршруту, Снижение и Посадка.

Рис. 1.1
Каждый этап полета контролируется системой управления воздушным движением (Диспетчерское обслуживание).
Путь самолета (проекция траектории на поверхность Земли) является общим термином, используемым для указания пути, по которому самолет перемещается над землей (Рис. 1.2).
Рис. 1.2
В аэронавигации различают программную (заданную) и фактическую траекторию полета ВС. Угол отклонения фактической траектории от заданной Называется траекторной ошибкой (Рис.1.3).
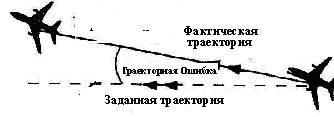
Рис. 1.3
Место ВС. Под термином место в аэронавигации принято называть проекцию центра масс ВС на поверхность земли, т.е. точка на земной поверхности над которой в данный момент времени находится ВС. Как правило, координаты этой точки определяются в географической или геодезической системе координат долгота, широта ( Рис. 1.4).
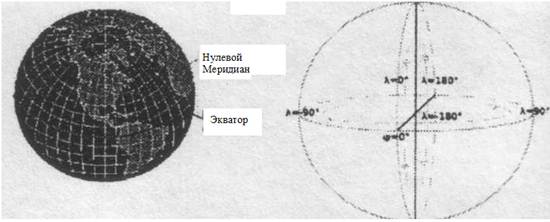
Рис. 1.4
Пространственное место ВС - положение центра масс ВС в пространстве т.е. с учетом высоты полета над точкой на земной поверхности над которой в данный момент времени находится ВС.
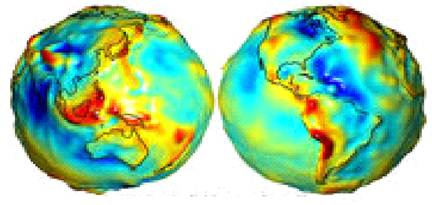
Земля имеет неправильную форму. Эквипотенциальной поверхности в гравитационном поле Земли, которое совпадает с невозмущенной средний уровень моря (MSL) непрерывно продолжается через континенты называется геоида (рис. 1.5).
 | |||
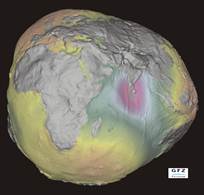 | |||
Рис. 1.5
Геоид также имеет неправильную форму из-за местных гравитационных возмущений и направления силы тяжести перпендикулярно геоида в каждой точке. Такая форма Земли обычно используется для определения местоположения и направление движения на короткие расстояния (до 400 км).
При определении местоположения ВС на больших расстояниях используют эллипсоидальные модели Земли.
Координаты (широта и долгота) привязкой к математически определённому референт эллипсоиду определяют географическое местоположение. При этом точка на поверхности Земли непосредственно под ВС не находится на линии, соединяющей данную точку и центр Земли а нанаходится в точке Это та точка находится располагается на зенитной линии (Рис. 1.6)
К параметрам Референц-эллипсоида относятся: большая полуось (экваториальный радиус), а; малая полуось (полярный радиус), Ь; а также геометрическое (полярное) сжатие f.
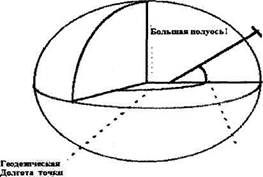 f=(a-b)/a
f=(a-b)/a
 |
Рис. 1.6
Различные эллипсоиды используются отдельными странами и учреждениями. Некоторые из них приведенные в таблице.
| Параметр | Крассовского (Россия) | Бесселя (ФРГ.ШВЕЦ (German) | Кларка (Сев. Америка | Хайворда (Зап. ЕВРОПА) | WGS 84 ( Межд. геод система) |
| am | 6 378 245 | 6 377 397 | 6 378 388 | 6 378 249 | 6 378 137 |
| bm | 6 356 863 | 6 356 079 | 6 356 912 | 6 356 515 | 6 356 752 |
| f=(a-b)/a | 298.3 | 299.15 | 294.98 | 297.0 | 298.257 |
Глобальная навигационная спутниковая система (ГНСС) при определении
местоположения ВС использует эллипсоидальную модель Земли, международной
геодезической системы WGS 84
Высота. В аэронавигации различаюттри вида высот- относительная,
абсолютная и истинная (Рис. 1.7).
 |
Рис. 1.7
Относительная высота вертикальная дистанция до определенной точки земной
поверхности (обычно аэропортов вылета и посадки).
Абсолютная высота вертикальная дистанция до среднего уровня моря (MSL).
Истинная высота р асстояние по вертикали до наземной точки над которым
находится В.С.
Пеленг Горизонтальное направление на объект (радиостанцию) измеряемое по часовой стрелке от нулевого направления (магнитный севера) (Рис. 1.8)..
Пеленг представляет собой угол от северного меридиана до направления на радиостанцию и определяется суммой магнитного курса (МК) и курсового угла радиостанции (КУР).
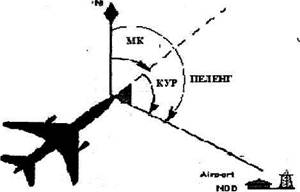
Рис. 1.8
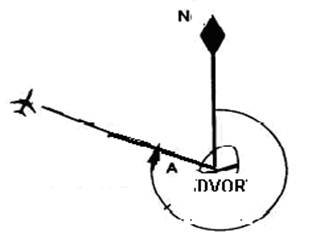 Азимут (Пеленг на самолет) представляет собой угол от северного меридиана наземного радиомаяка до направления на самолет (1.9).
Азимут (Пеленг на самолет) представляет собой угол от северного меридиана наземного радиомаяка до направления на самолет (1.9).
.
Figure 1.9
В аэронавигации различают два вида скорости ВС-Воздушная и Путевая. Векторы скорости ветра, воздушной и путевой скорости составляют Векторный треугольник скоростей (Рис. 1.8).

Рис. 1.9
Воздушная скорость V определяют относительно воздушного потока Вектор Воздушной скорости в общем случае не совпадает с продольной осью ВС. Его отклонение определяется углами между продольной оси ВС и вектором скорости. Эти отклонения невелики поэтому в теории и практике навигации не учитываются.
Путевая Скорость W — скорость полета самолета относительно поверхности земли. В общем случае с учетом кривизны путевая скорость направлена по касательной к земной поверхности. На практике и это не учитывается т.к. до высоты 30км ошибка при таком допущении не превышает 0,5 %. Угол сноса  -угол между векторами V и W.
-угол между векторами V и W.
 |








